目录
概述
1 认识DS1302
1.1 DS1302 硬件电路
1.2 操作DS1302
1.3 注意要点
2 IO引脚位置
3 添加驱动节点
3.1 更新内核.dts
3.2 更新板卡.dtb
4 驱动程序实现
4.1 编写驱动程序
4.2 编写驱动程序的Makefile
4.3 安装驱动程序
5 验证驱动程序
5.1 编写测试程序
5.2 编写测试程序代码Makefile
5.3 运行测试App
6 实时波形分析
概述
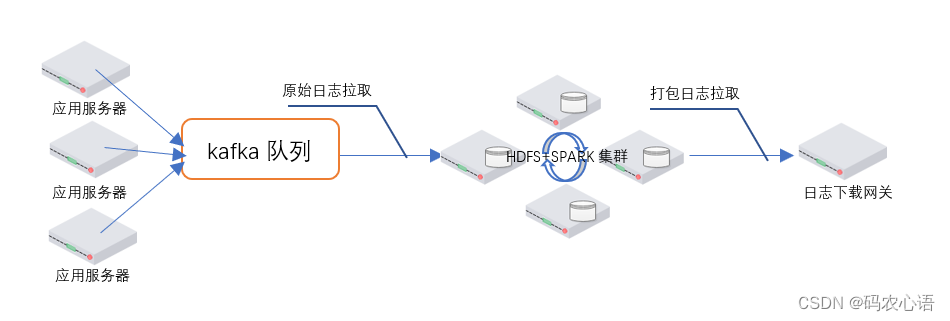
本文介绍在platform-tree框架下如何实现复杂总线驱动程序,以DS1302为例,详细介绍如何在linux内核中,添加driver tree节点,以及如何在驱动程序中,调用多线接口IO。
1 认识DS1302
DS1302 数据手册和产品信息 | 亚德诺(ADI)半导体 (analog.com)
DS1302是一款使用非常普遍的实时时钟芯片,可提供,年月日,时分秒,week实时数据。其和MCU直接的电路也非常简单,只需3个引脚(CE, IO , CLK)。
主要特性
- 完全管理所有计时功能
- 实时时钟可为秒、分、小时、日期、月、星期和年计数,闰年补偿有效期至2100年
- 31 x 8电池供电通用RAM
- 通过简单的串行端口与大多数微控制器进行接口
- 简单的3线接口
- TTL兼容(VCC = 5V)
- 用于读取或写入时钟或RAM数据的单字节或多字节(突发模式)数据传输
- 低功耗运行可延长备用电池运行时间
- 2.0V至5.5V全面运行
- 2.0V时电流消耗小于300nA
- 8引脚DIP和8引脚SO封装充分减少了所需空间
- 可选工业温度范围:-40°C至+85°C支持在多种应用中工作
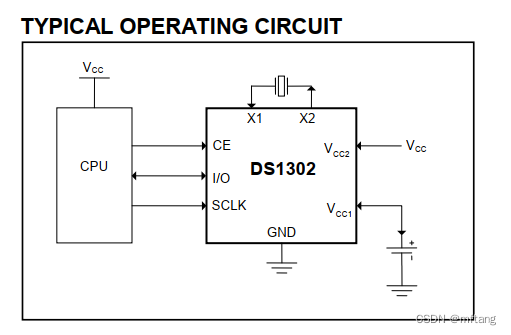
1.1 DS1302 硬件电路
CE: 使能引脚
IO: 数据引脚(读/写数据)
SCLK: 时钟引脚
1.2 操作DS1302
读寄存器波形如下:
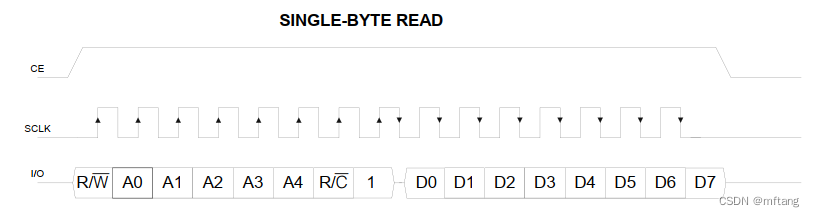
CE: 高电平有效
写地址时,CLK上升沿有效
读数据时,CLK下降沿有效
写寄存器波形:

CE: 高电平有效
写地址时,CLK上升沿有效
写数据时,CLK上升沿有效
1.3 注意要点
从DS1302中读取的时间数据位BCD码,所以,在实际运用时,需要将其转化为十进制,例如:
// 从寄存器中读出的值为: 0x14,使用时需要将其转化为14,方法如下:
static unsigned char bcd_2_dem(unsigned char x)
{
return (x>>4)*10+(x&0x0f); //高4位乘以10,再加上低4位,即得到数值
}初始化DS1302寄存器时,要进行上述数据转换的逆操作,方法如下:
// 如果要配置分钟数为25分钟,写到寄存器的值应该是: 0x25。转换方法如下:
unsigned char dem_2_bcd( unsigned char val )
{
return (((val/10)& 0x0f)<<4)|((val%10)&0x0f);
}
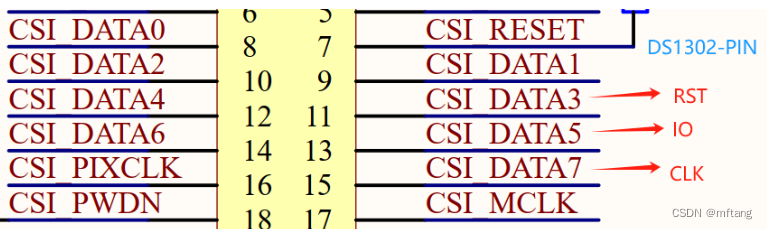
2 IO引脚位置
DS1302芯片在测试底板上的IO引脚位置:
//GPIO4_24: DS1302_CE
//GPIO4_26: DS1302_IO
//GPIO4_28: DS1302_CLK
CE_1302 = P2^4; ----- D3 -- GPIO4_24
IO_1302 = P2^3; ----- D5 -- GPIO4_26
CLK_1302 = P2^2; ----- D7 -- GPIO4_28硬件实物图:
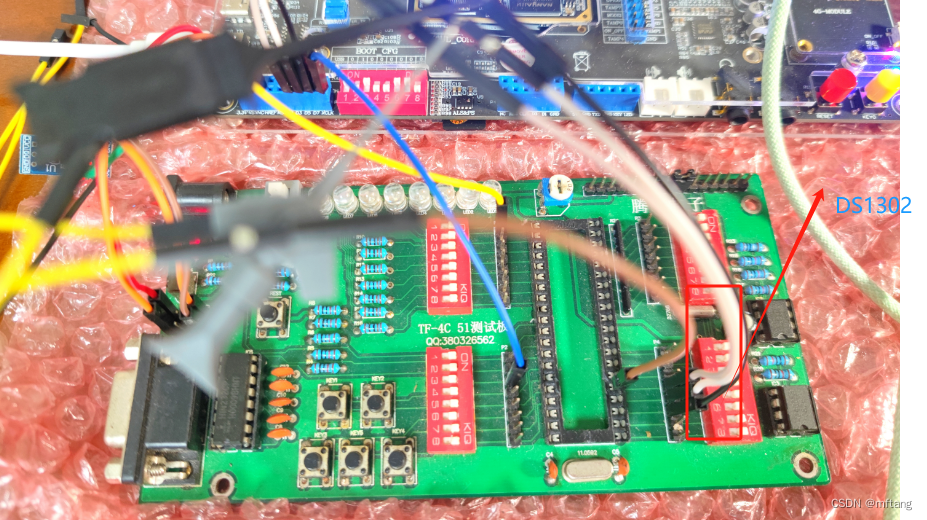
在板卡ATK-DL6Y2C上DS1302的对应接口:
3 添加驱动节点
3.1 更新内核.dts
DS1302引脚和IMX.6ULL引脚对应关系:
GPIO4_24: DS1302_CE
GPIO4_26: DS1302_IO
GPIO4_28: DS1302_CLK.dts文件路径:
/home/mftang/linux_workspace/study_atk_dl6y2c/kernel/atk-dl6u2c/arch/arm/boot/dts/imx6ull-14x14-evk.dts1) 使用 i.MX Pins Tool v6 配置IO Pin
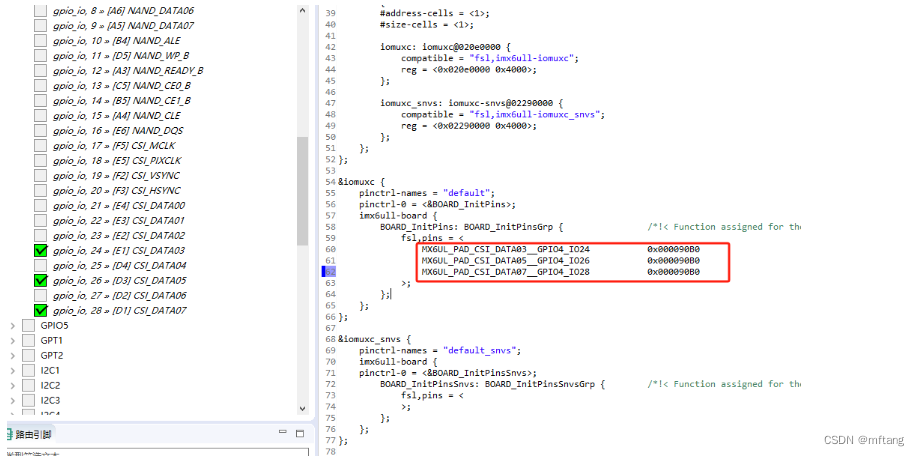
2) 添加IOMUXC数据至.dts文件

3)添加设备compatible至.dts文件
代码信息
//mftang: user's ds1302, 2024-1-31
//GPIO4_24: DS1302_CE
//GPIO4_26: DS1302_IO
//GPIO4_28: DS1302_CLK
mftangds1302 {
compatible = "atk-dl6y2c,ds1302";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gpio_mftangds1302>;
ce-gpios = <&gpio4 24 GPIO_ACTIVE_HIGH>;
io-gpios = <&gpio4 26 GPIO_ACTIVE_HIGH>;
clk-gpios = <&gpio4 28 GPIO_ACTIVE_HIGH>;
status = "okay";
}; 4) 编译.dts文件
在内核根目录下使用
make dtbs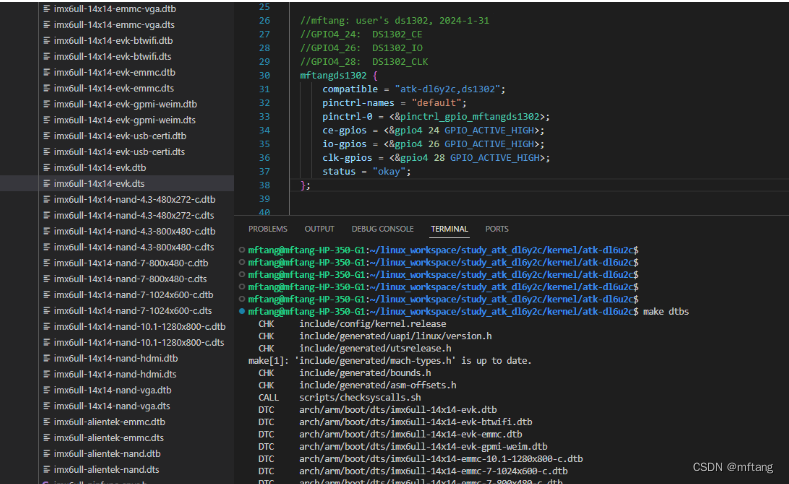
5) 复制 .dtb 文件至NFS共享目录
cp arch/arm/boot/dts/imx6ull-14x14-emmc-4.3-480x272-c.dtb /home/mftang/nfs/atk_dl6y2c/
3.2 更新板卡.dtb
开发版中的.dtb文件存放位置:
cd /run/media/mmcblk1p1
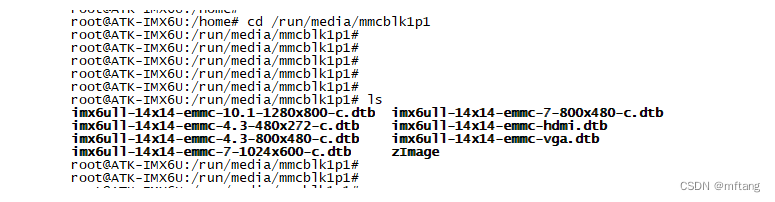
在开发板上把 .dtb文件复制到应用目录中:
cp /mnt/atk_dl6y2c/imx6ull-14x14-emmc-4.3-480x272-c.dtb /run/media/mmcblk1p1
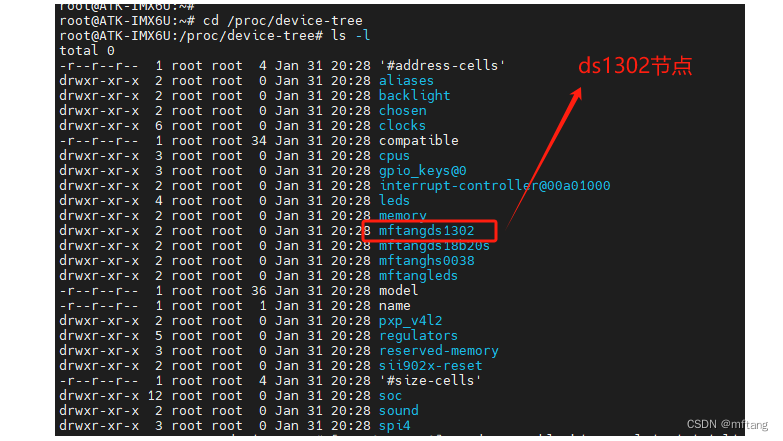
复制.dtb文件到相应的运行目录,然后重新板卡。在/proc/device-tree中可以看见device节点,然后可以在driver中使用该节点。
4 驱动程序实现
4.1 编写驱动程序
驱动程序源码:
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : drv_09_tree_hs0038.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : ds1302 驱动程序
其他 : 无
日志 : 初版V1.0 2024/02/01
使用方法:
1) 在.dts文件中定义节点信息
//mftang: user's ds1302, 2024-1-31
//GPIO4_24: DS1302_CE
//GPIO4_26: DS1302_IO
//GPIO4_28: DS1302_CLK
mftangds1302 {
compatible = "atk-dl6y2c,ds1302";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gpio_mftangds1302>;
gpios-ce = <&gpio4 24 GPIO_ACTIVE_HIGH>;
gpios-io = <&gpio4 26 GPIO_ACTIVE_HIGH>;
gpios-clk = <&gpio4 28 GPIO_ACTIVE_HIGH>;
status = "okay";
};
2) 在驱动匹配列表
static const struct of_device_id ds1302_of_match[] = {
{ .compatible = "atk-dl6y2c,ds1302" },
{ } // Sentinel
};
3) 驱动使用方法:
typedef struct{
unsigned char second;
unsigned char minute;
unsigned char hour;
unsigned char week;
unsigned char day;
unsigned char month;
unsigned char year;
}stru_ds1302_rtc;
stru_ds1302_rtc rtc;
read(fd, &rtc, sizeof(stru_ds1302_rtc));
***************************************************************/
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
#include <linux/workqueue.h>
#include <asm/current.h>
#define DEVICE_NAME "treeds1302" // dev/treeds1302
/* ds1302dev设备结构体 */
struct ds1302stru_dev{
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev */
struct class *class; /* 类 */
struct device *device; /* 设备 */
int major; /* 主设备号 */
struct device_node *node; /* ds1302设备节点 */
int userds1302; /* ds1302 GPIO标号 */
struct gpio_desc *pin_ce;
struct gpio_desc *pin_io;
struct gpio_desc *pin_clk;
};
struct ds1302stru_dev ds1302dev; /* ds1302设备 */
static wait_queue_head_t ds1302_wq;
static const unsigned char RTC_REG[7] = {0x80, 0x82, 0x84, 0x86, 0x88, 0x8a, 0x8c};
/*
device 相关的驱动程序
*/
static unsigned char bcd_2_dem(unsigned char x)
{
return (x>>4)*10+(x&0x0f); //高4位乘以10,再加上低4位,即得到数值
}
static void ds1302_wr_byte(unsigned char dat) //DS1302:写入操作
{
unsigned char i;
for(i=0;i<8;i++)
{
if(dat&0x01){ //从低字节开始传送
gpiod_direction_output(ds1302dev.pin_io, 1); // ds1302 io = 1
}
else {
gpiod_direction_output(ds1302dev.pin_io, 0); // ds1302 io = 0
}
// CLK_1302=0;
gpiod_direction_output(ds1302dev.pin_clk, 0);
// CLK_1302=1;
gpiod_direction_output(ds1302dev.pin_clk, 1);
dat = dat>>1;
}
}
static unsigned char ds1302_rd_byte(void) //DS1302:读取操作
{
unsigned char i,temp = 0;
// IO_1302 as input
gpiod_direction_input( ds1302dev.pin_io );
for(i=0;i<8;i++)
{
if( gpiod_get_value(ds1302dev.pin_io) )
temp=temp|0x80;
else
temp=temp&0x7f;
// CLK_1302 = 1
gpiod_direction_output(ds1302dev.pin_clk, 1);
// CLK_1302 = 0
gpiod_direction_output(ds1302dev.pin_clk, 0);
temp=temp>>1;
}
return(temp);
}
static void write_ds1302_reg(unsigned char addr,unsigned char dat)
{
unsigned long flags;
local_irq_save(flags);
//CLK_1302=0;
gpiod_direction_output(ds1302dev.pin_clk,0);
//CE_1302=1;
gpiod_direction_output(ds1302dev.pin_ce, 1);
ds1302_wr_byte(addr);
ds1302_wr_byte(dat);
//CE_1302=0;
gpiod_direction_output(ds1302dev.pin_ce, 0);
//CLK_1302=0;
gpiod_direction_output(ds1302dev.pin_clk,0);
local_irq_restore(flags);
}
static unsigned char read_ds1302_reg(unsigned char addr)
{
unsigned long flags;
unsigned char temp;
local_irq_save(flags);
// CLK_1302=0
gpiod_direction_output(ds1302dev.pin_clk, 0);
// CE_1302=1
gpiod_direction_output(ds1302dev.pin_ce, 1);
ds1302_wr_byte(addr); //写入地址
temp = ds1302_rd_byte();
// CE_1302=0
gpiod_direction_output(ds1302dev.pin_ce, 0);
// CLK_1302=0
gpiod_direction_output(ds1302dev.pin_clk, 0);
local_irq_restore(flags);
return(temp);
}
static void ds1302_wr_wp(unsigned char wp)
{
if (wp)
write_ds1302_reg(0x8e,0x80);
else
write_ds1302_reg(0x8e,0x00);
}
static void ds1302_stop(unsigned char flag)
{
unsigned char chold;
chold = read_ds1302_reg(0x81);
if (flag)
write_ds1302_reg(0x80,chold|0x80);
else
write_ds1302_reg(0x80,chold&0x7f);
}
static unsigned char ds1302_read_rtc( unsigned char reg )
{
unsigned char dat;
dat = read_ds1302_reg(reg);
return bcd_2_dem(dat);
}
static void ds1302_get_rtc( unsigned char *buff)
{
int LEN = sizeof(RTC_REG);
int i = 0;
for( i = 0; i < LEN; i++ ){
buff[i] = ds1302_read_rtc( RTC_REG[i]|0x01);
}
}
static void ds1302_drv_init( unsigned char *buff )
{
unsigned long flags;
unsigned char temp,val;
int LEN = sizeof(RTC_REG);
int i;
ds1302_stop(1); // stop clock
ds1302_wr_wp(0); // enable write
local_irq_save(flags);
for ( i=0; i < LEN; i++)
{
val = buff[i];
temp = (((val/10)& 0x0f)<<4)|((val%10)&0x0f);
write_ds1302_reg( RTC_REG[i], temp );
}
local_irq_restore(flags);
ds1302_wr_wp(1); // disable write
ds1302_stop(0); // enable clock
}
/*
linux driver 驱动接口:
实现对应的open/read/write等函数,填入file_operations结构体
*/
static ssize_t ds1302_drv_write(struct file *filp,
const char __user *buf, size_t cnt,
loff_t *offt)
{
int LEN = sizeof(RTC_REG);
unsigned char tempbuff[LEN];
int length;
length = copy_from_user(tempbuff, buf, LEN);
if( cnt != LEN ){
printk(" %s line %d write ds1302 register error! \r\n", __FUNCTION__, __LINE__);
return 0;
}
else{
ds1302_drv_init( tempbuff );
}
return cnt;
}
static ssize_t ds1302_drv_read (struct file *file, char __user *buf,
size_t size, loff_t *offset)
{
int LEN = sizeof(RTC_REG);
unsigned char tempbuff[LEN];
int length;
ds1302_get_rtc( tempbuff );
length = copy_to_user(buf, tempbuff, LEN);
return length;
}
static unsigned int ds1302_drv_poll(struct file *fp, poll_table * wait)
{
printk(" %s line %d \r\n", __FUNCTION__, __LINE__);
return 0;
}
static int ds1302_drv_close(struct inode *node, struct file *file)
{
printk(" %s line %d \r\n", __FUNCTION__, __LINE__);
return 0;
}
/*
定义driver的file_operations结构体
*/
static struct file_operations ds1302_fops = {
.owner = THIS_MODULE,
.write = ds1302_drv_write,
.read = ds1302_drv_read,
.poll = ds1302_drv_poll,
.release = ds1302_drv_close,
};
/* 1. 从platform_device获得GPIO
mftangds1302 {
compatible = "atk-dl6y2c,ds1302";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_gpio_mftangds1302>;
ce-gpios = <&gpio4 24 GPIO_ACTIVE_HIGH>;
io-gpios = <&gpio4 26 GPIO_ACTIVE_HIGH>;
clk-gpios = <&gpio4 28 GPIO_ACTIVE_HIGH>;
status = "okay";
};
*/
static int ds1302_probe(struct platform_device *pdev)
{
printk("ds0302 driver and device was matched!\r\n");
/* 1. 获得硬件信息 */
ds1302dev.pin_ce = gpiod_get(&pdev->dev, "ce", 0);
if (IS_ERR(ds1302dev.pin_ce))
{
printk("%s line %d get ce parameter error! \n", __FUNCTION__, __LINE__);
}
ds1302dev.pin_io = gpiod_get(&pdev->dev, "io", 0);
if (IS_ERR(ds1302dev.pin_io))
{
printk("%s line %d get io parameter error! \n", __FUNCTION__, __LINE__);
}
ds1302dev.pin_clk = gpiod_get(&pdev->dev, "clk", 0);
if (IS_ERR(ds1302dev.pin_clk))
{
printk("%s line %d get clk parameter error! \n", __FUNCTION__, __LINE__);
}
/* 2. device_create */
device_create( ds1302dev.class, NULL,
MKDEV( ds1302dev.major, 0 ), NULL,
DEVICE_NAME);
return 0;
}
static int ds1302_remove(struct platform_device *pdev)
{
device_destroy( ds1302dev.class, MKDEV( ds1302dev.major, 0));
gpiod_put(ds1302dev.pin_ce);
gpiod_put(ds1302dev.pin_io);
gpiod_put(ds1302dev.pin_clk);
return 0;
}
static const struct of_device_id atk_dl6y2c_ds1302[] = {
{ .compatible = "atk-dl6y2c,ds1302" },
{ },
};
/* 1. 定义platform_driver */
static struct platform_driver ds1302_pltdrv = {
.probe = ds1302_probe,
.remove = ds1302_remove,
.driver = {
.name = "atk_ds1302",
.of_match_table = atk_dl6y2c_ds1302,
},
};
/* 2. 在入口函数注册platform_driver */
static int __init ds1302_init(void)
{
printk("%s line %d\n",__FUNCTION__, __LINE__);
/* register file_operations */
ds1302dev.major = register_chrdev( 0,
DEVICE_NAME, /* device name */
&ds1302_fops);
/* create the device class */
ds1302dev.class = class_create(THIS_MODULE, "ds1302_class");
if (IS_ERR(ds1302dev.class)) {
printk("%s line %d\n", __FUNCTION__, __LINE__);
unregister_chrdev( ds1302dev.major, DEVICE_NAME);
return PTR_ERR( ds1302dev.class );
}
init_waitqueue_head(&ds1302_wq);
return platform_driver_register(&ds1302_pltdrv);
}
/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
* 卸载platform_driver
*/
static void __exit ds1302_exit(void)
{
printk("%s line %d\n", __FUNCTION__, __LINE__);
platform_driver_unregister(&ds1302_pltdrv);
class_destroy(ds1302dev.class);
unregister_chrdev(ds1302dev.major, DEVICE_NAME);
}
/* 7. 其他完善:提供设备信息,自动创建设备节*/
module_init(ds1302_init);
module_exit(ds1302_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("tangmingfei2013@126.com");4.2 编写驱动程序的Makefile
PWD := $(shell pwd)
KERNEL_DIR=/home/mftang/linux_workspace/study_atk_dl6y2c/kernel/atk-dl6u2c
ARCH=arm
CROSS_COMPILE=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-
export ARCH CROSS_COMPILE
obj-m:= drv_10_tree_ds1302.o
all:
$(MAKE) -C $(KERNEL_DIR) M=$(PWD) modules
clean:
rm -rf .*.cmd *.o *.mod.c *.ko .tmp_versions *.order *.symvers4.3 安装驱动程序
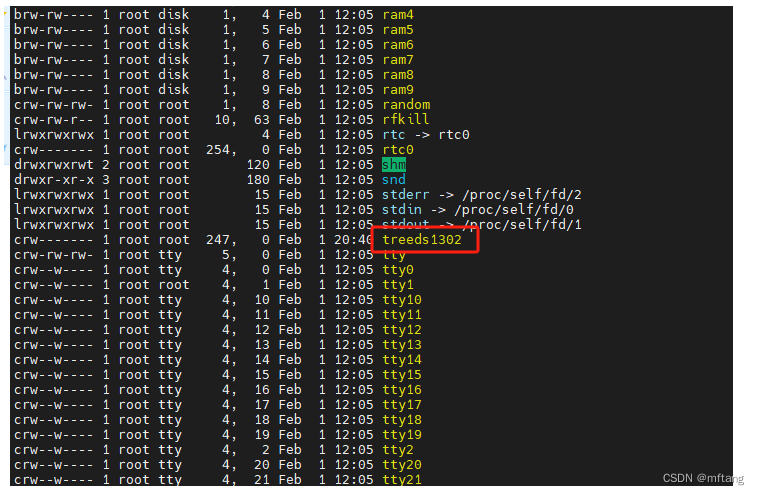
在dev/目录下查看驱动程序
5 验证驱动程序
5.1 编写测试程序
测试程序源码
/***************************************************************
Copyright 2024-2029. All rights reserved.
文件名 : test_10_tree_ds1302.c
作者 : tangmingfei2013@126.com
版本 : V1.0
描述 : ds1302 测试程序,用于测试 drv_10_tree_ds1302
日志 : 初版V1.0 2024/1/29
***************************************************************/
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#define DEV_NAME "/dev/treeds1302"
typedef struct{
unsigned char second;
unsigned char minute;
unsigned char hour;
unsigned char week;
unsigned char day;
unsigned char month;
unsigned char year;
}stru_ds1302_rtc;
stru_ds1302_rtc rtc;
int main(int argc, char **argv)
{
int fd;
fd = open(DEV_NAME, O_RDWR);
if (fd < 0){
printf("can not open file %s \r\n", DEV_NAME);
return -1;
}
// init rtc
rtc.year = 24;
rtc.month = 2;
rtc.day = 1;
rtc.week = 4;
rtc.hour = 18;
rtc.minute = 2;
rtc.second = 0;
write(fd, &rtc, sizeof(stru_ds1302_rtc));
while(1){
read(fd, &rtc, sizeof(stru_ds1302_rtc));
printf(" %02d-%02d-%02d week %d %02d:%02d:%02d \r\n", rtc.year, rtc.month, rtc.day, rtc.week,
rtc.hour,rtc.minute, rtc.second);
sleep(1);
}
close(fd);
return 0;
}5.2 编写测试程序代码Makefile
CFLAGS= -Wall -O2
CC=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-gcc
STRIP=/home/ctools/gcc-linaro-4.9.4-arm-linux-gnueabihf/bin/arm-linux-gnueabihf-strip
test_10_tree_ds1302: test_10_tree_ds1302.o
$(CC) $(CFLAGS) -o test_10_tree_ds1302 test_10_tree_ds1302.o
$(STRIP) -s test_10_tree_ds1302
clean:
rm -f test_10_tree_ds1302 test_10_tree_ds1302.o
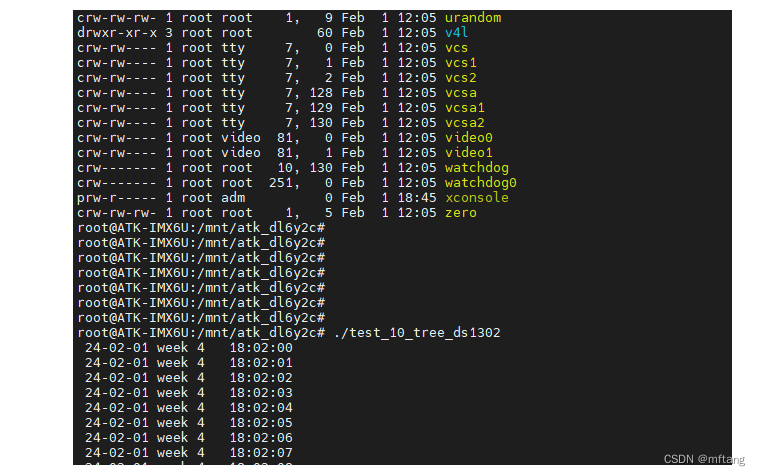
5.3 运行测试App
运行测试程序后,系统会初始化DS1302的时间,然后每隔1s从芯片中读取时间
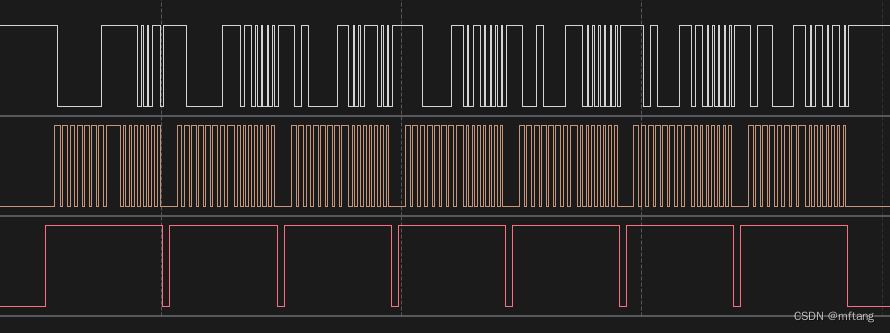
6 实时波形分析
分析一个简单的波形,从寄存器:0x81中读取秒数据,秒数为57,具体波形图如下
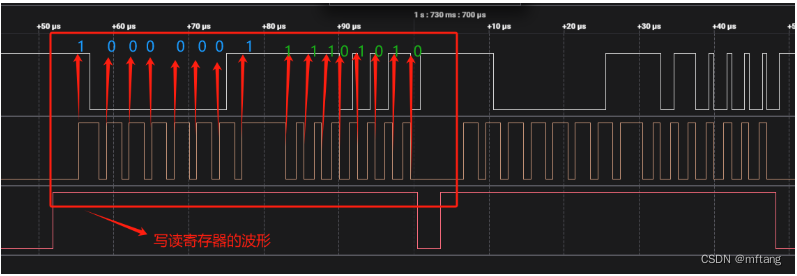
读一个完整的年月日时分秒波形