文章目录
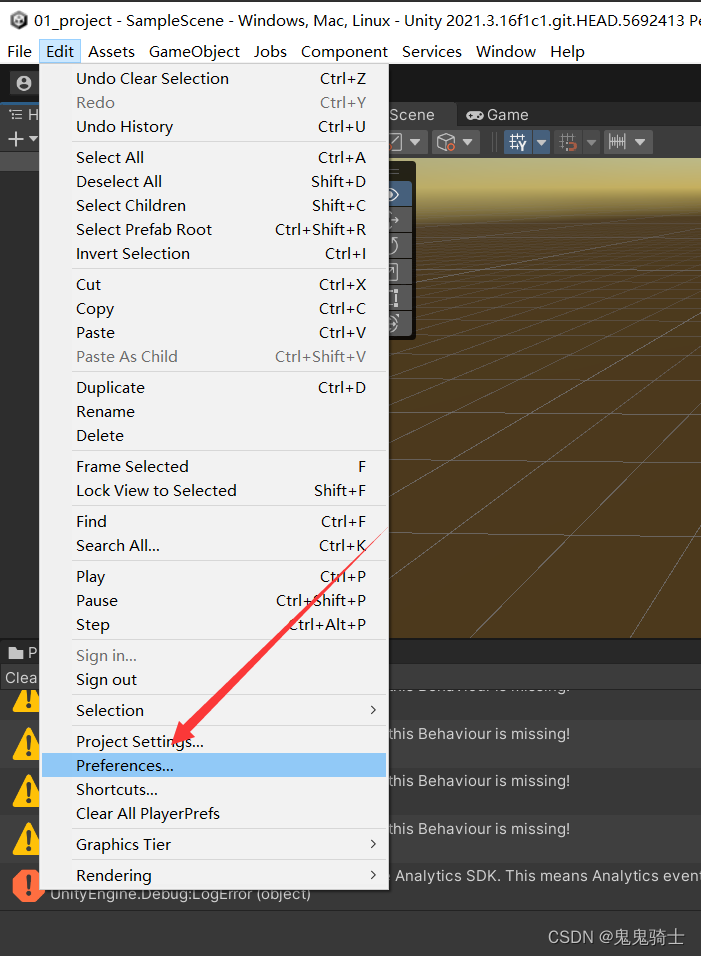
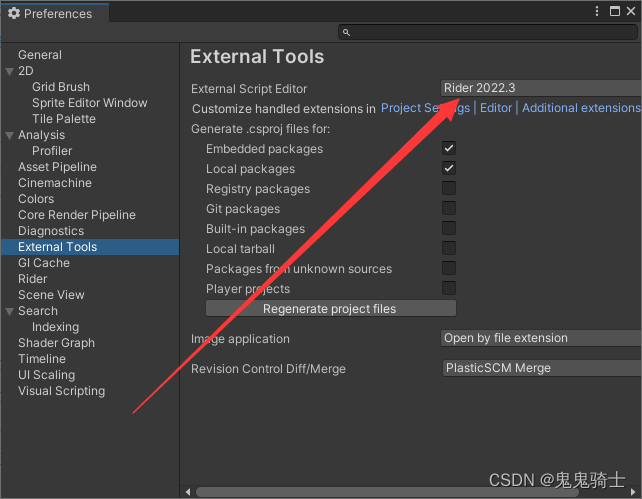
- 编译器推荐(Rider)
- 坐标
- 世界坐标系
- 相对坐标系
- 资源商店快捷入口
- 地面制作
- 脚本
- 新建脚本
- 生命周期
- vs测试打印
- 对象
- 标签(自带集合属性)
- 图层
- 预设体
- 创建预设体(cocos相同)
- 定位预设体文件位置
- 预设体添加、更新新内容
- 预设体变体
- 结构体
- vector
- 对象旋转
- 欧拉角,四元数
编译器推荐(Rider)
jet brain旗下软件,多好用不用我多说了
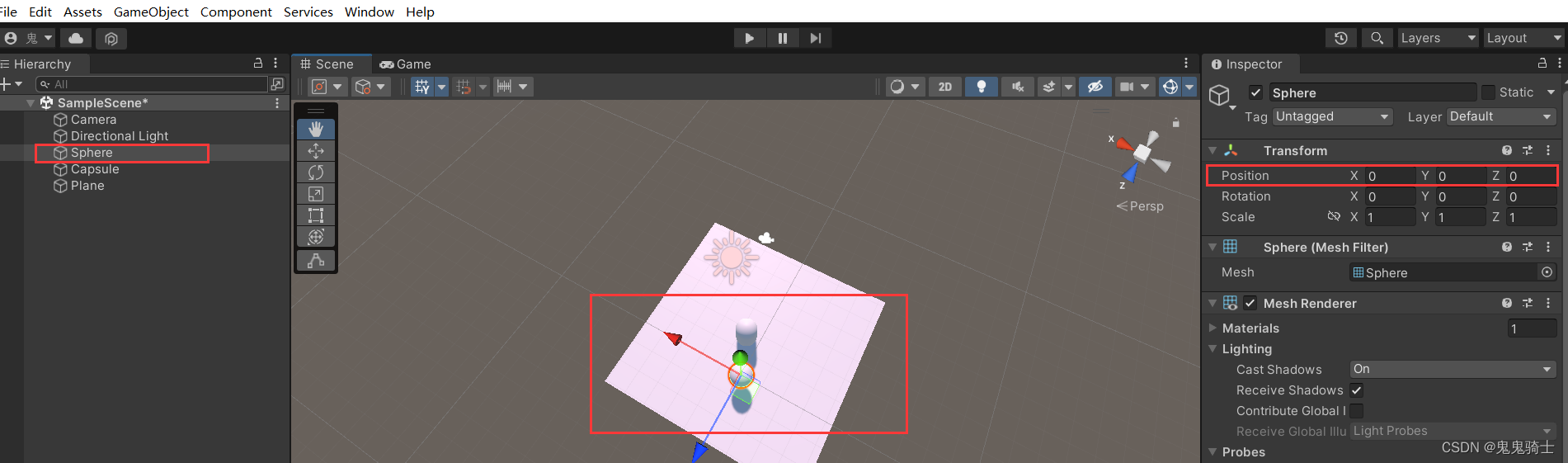
坐标
世界坐标系
这个球就位于世界坐标系0,0,0,也就是正中心
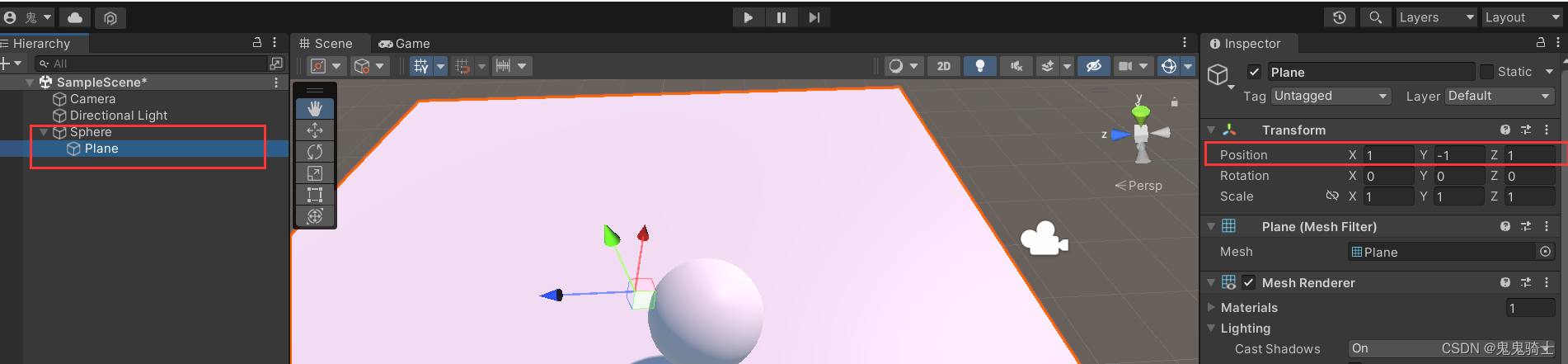
相对坐标系
相对于父Sphere的坐标系
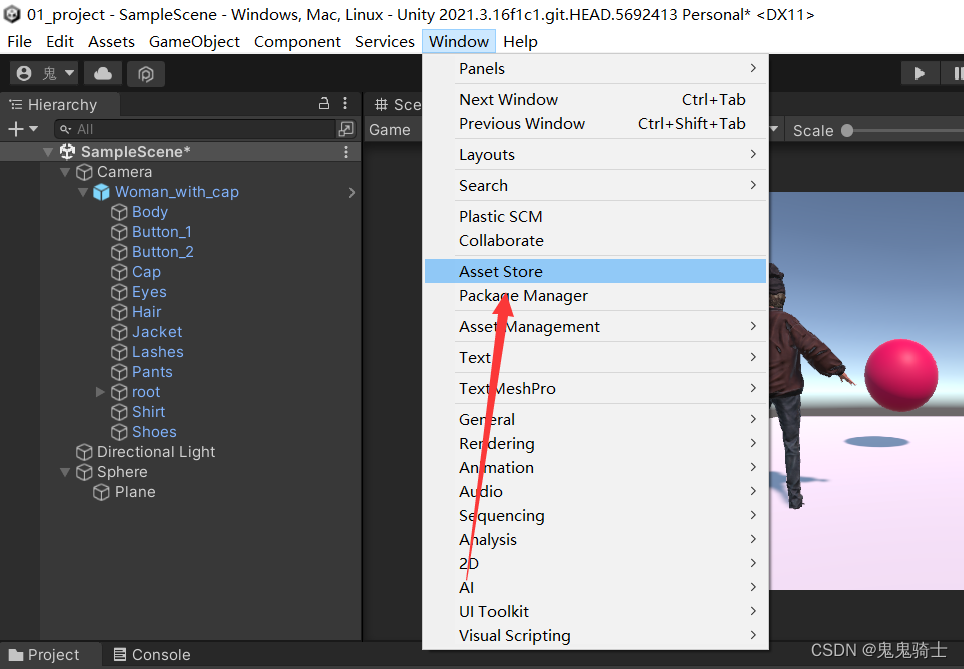
资源商店快捷入口
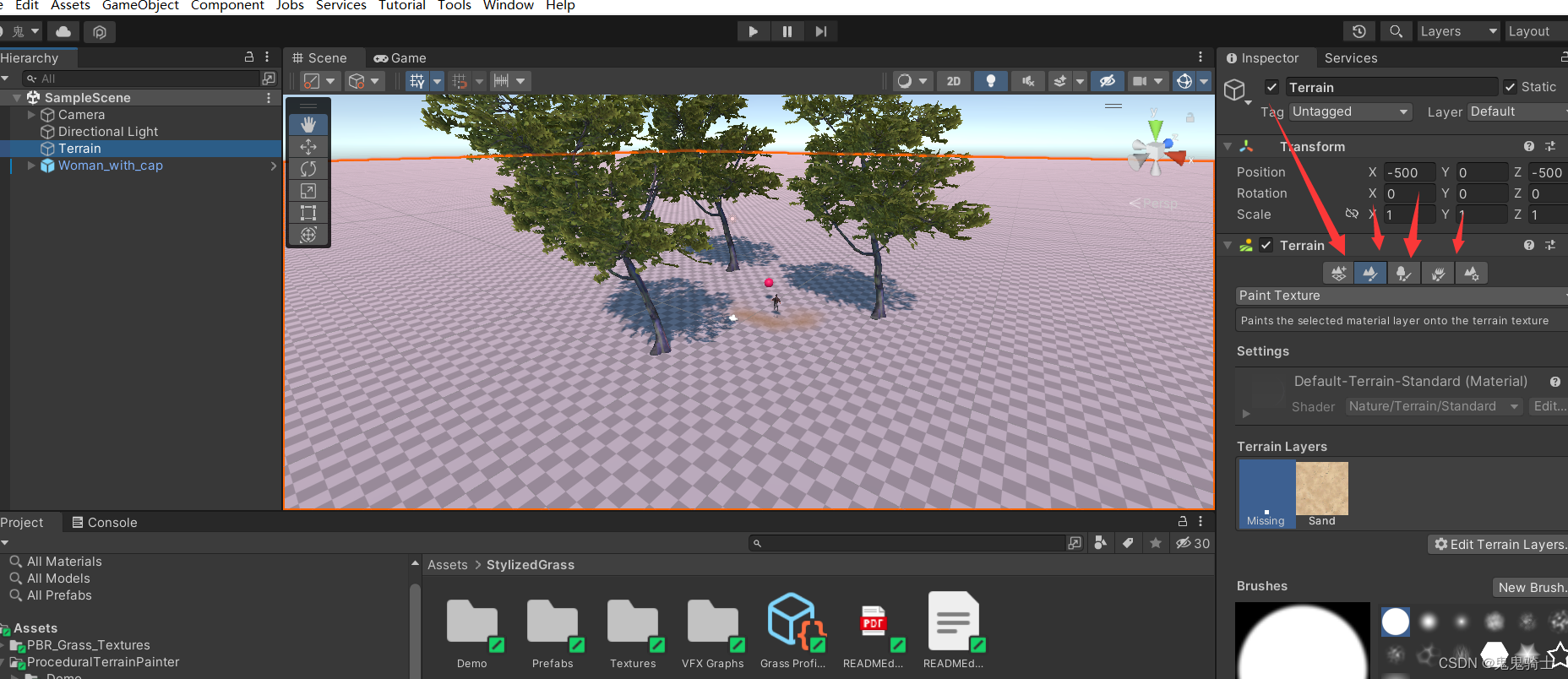
地面制作
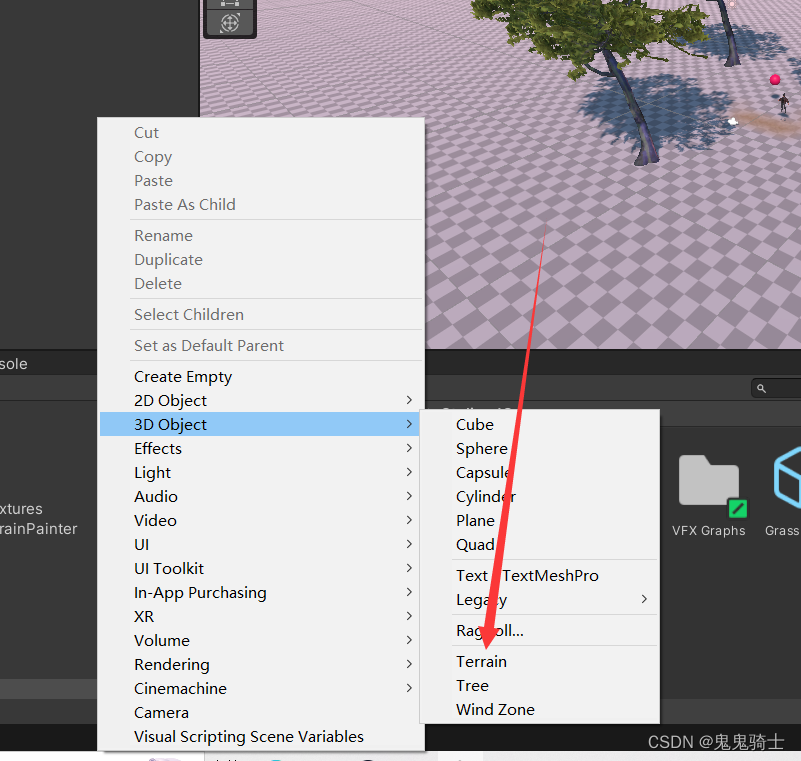
地形、山、树、草
脚本
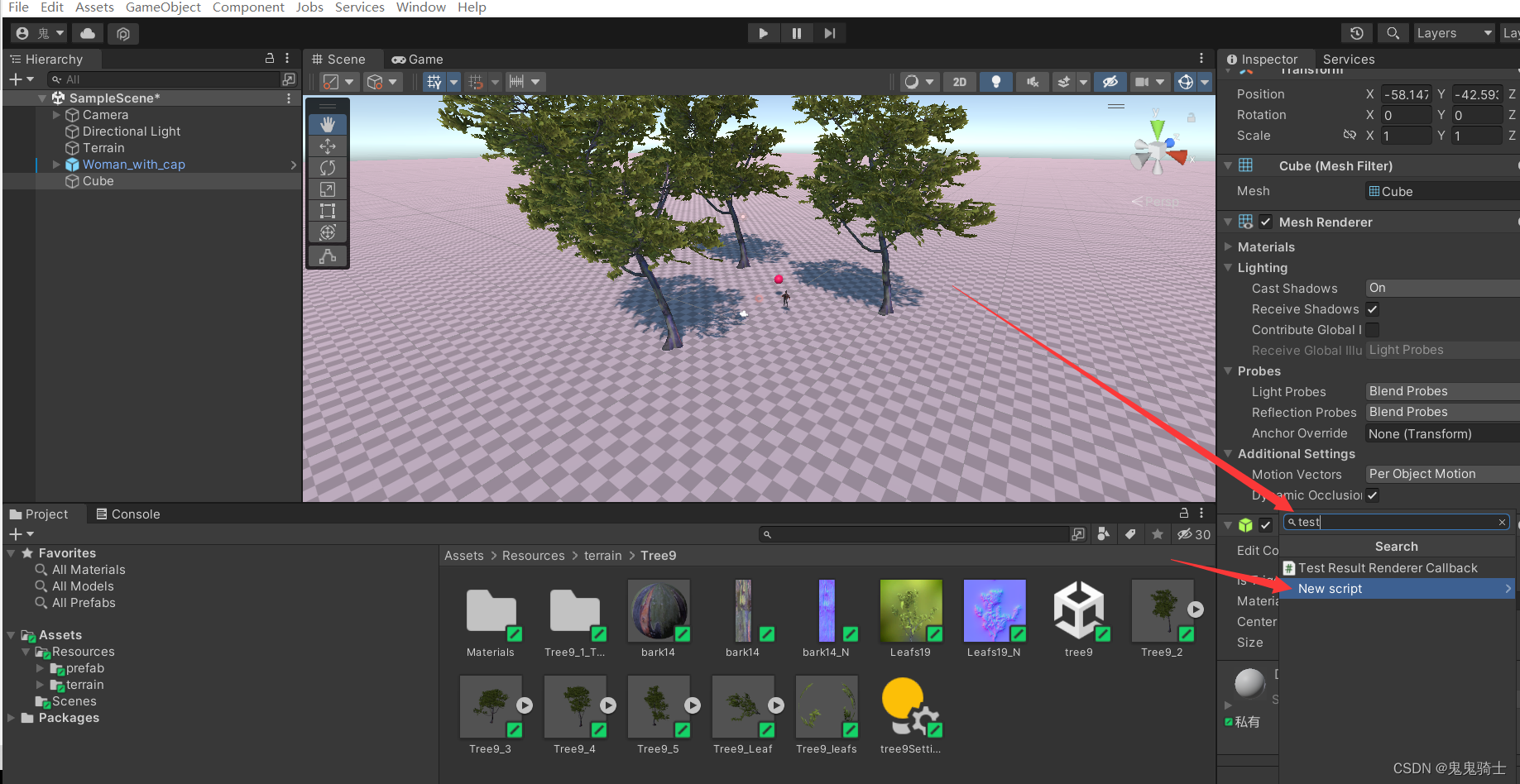
新建脚本
第一种方式
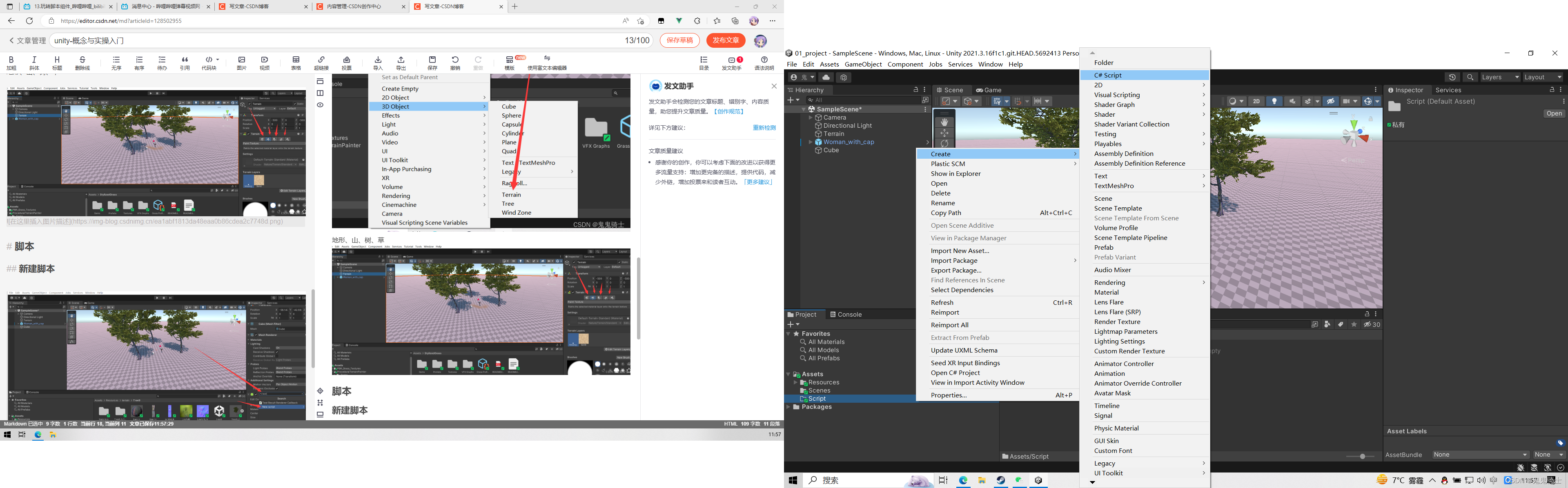
第二种方式
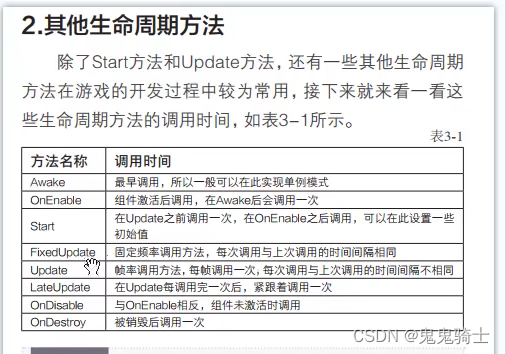
生命周期
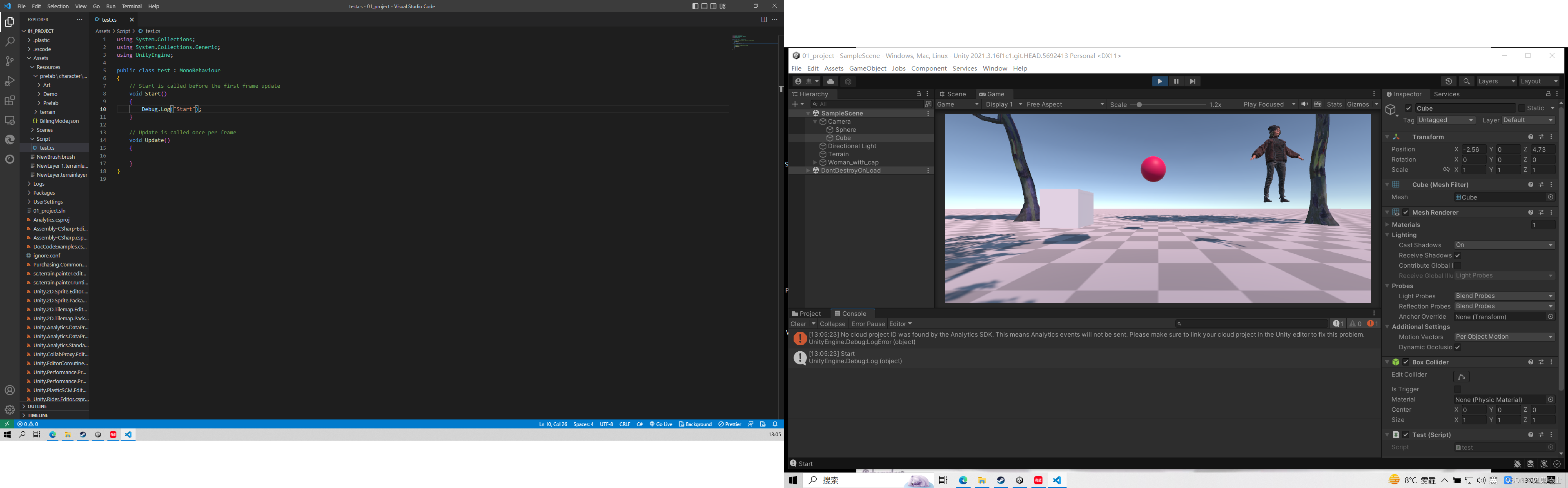
vs测试打印
对象
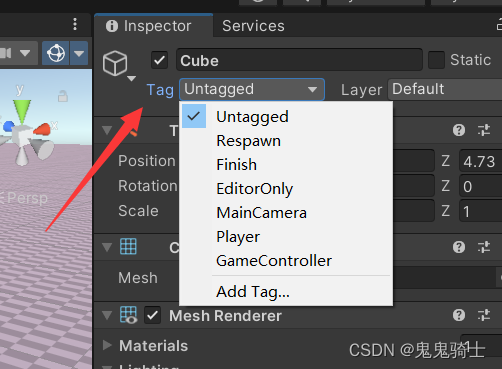
标签(自带集合属性)
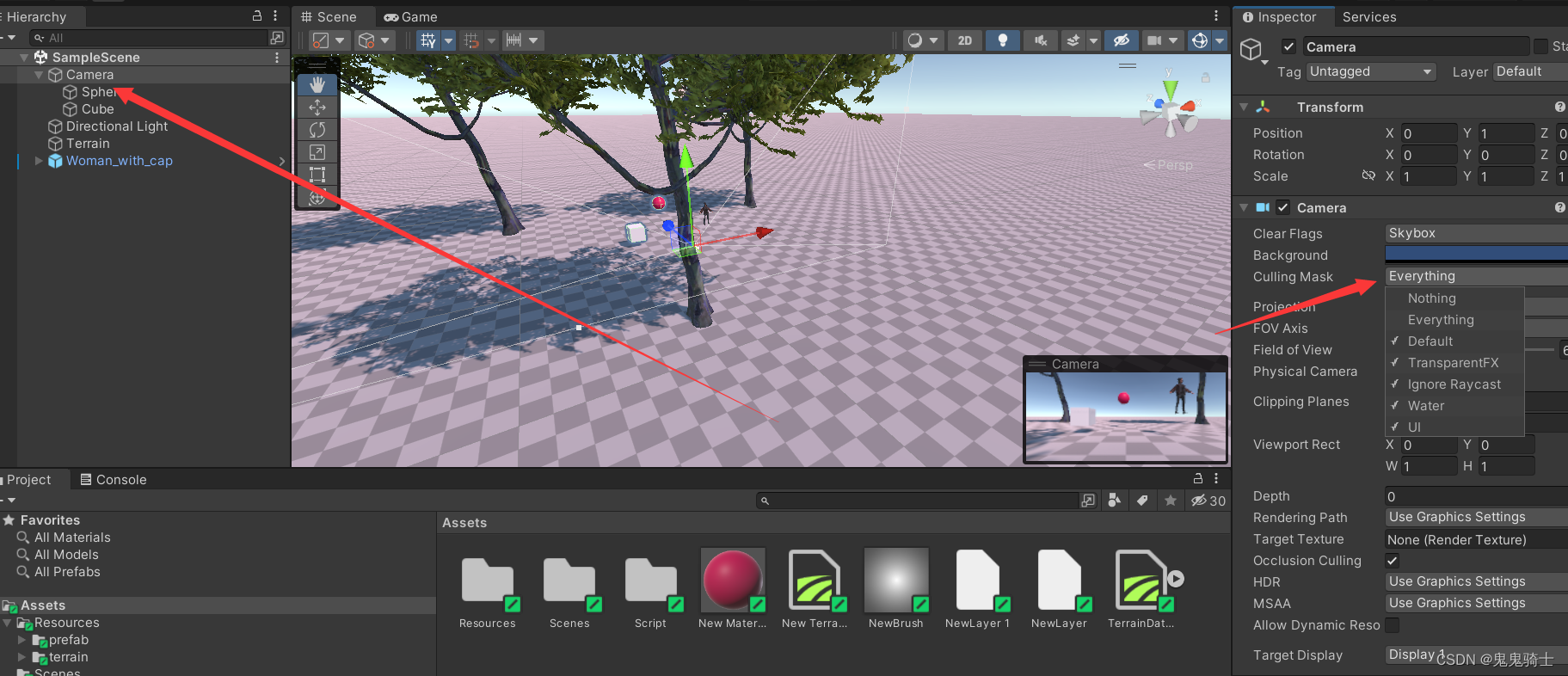
图层
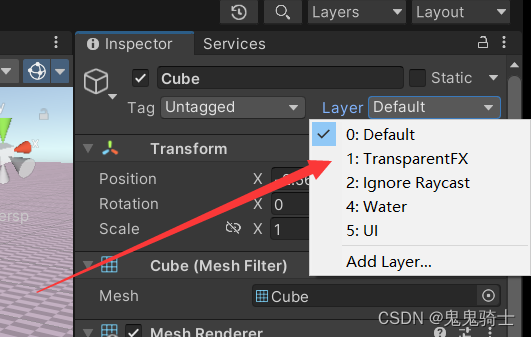
和摄像机这个属性对应,是否显示
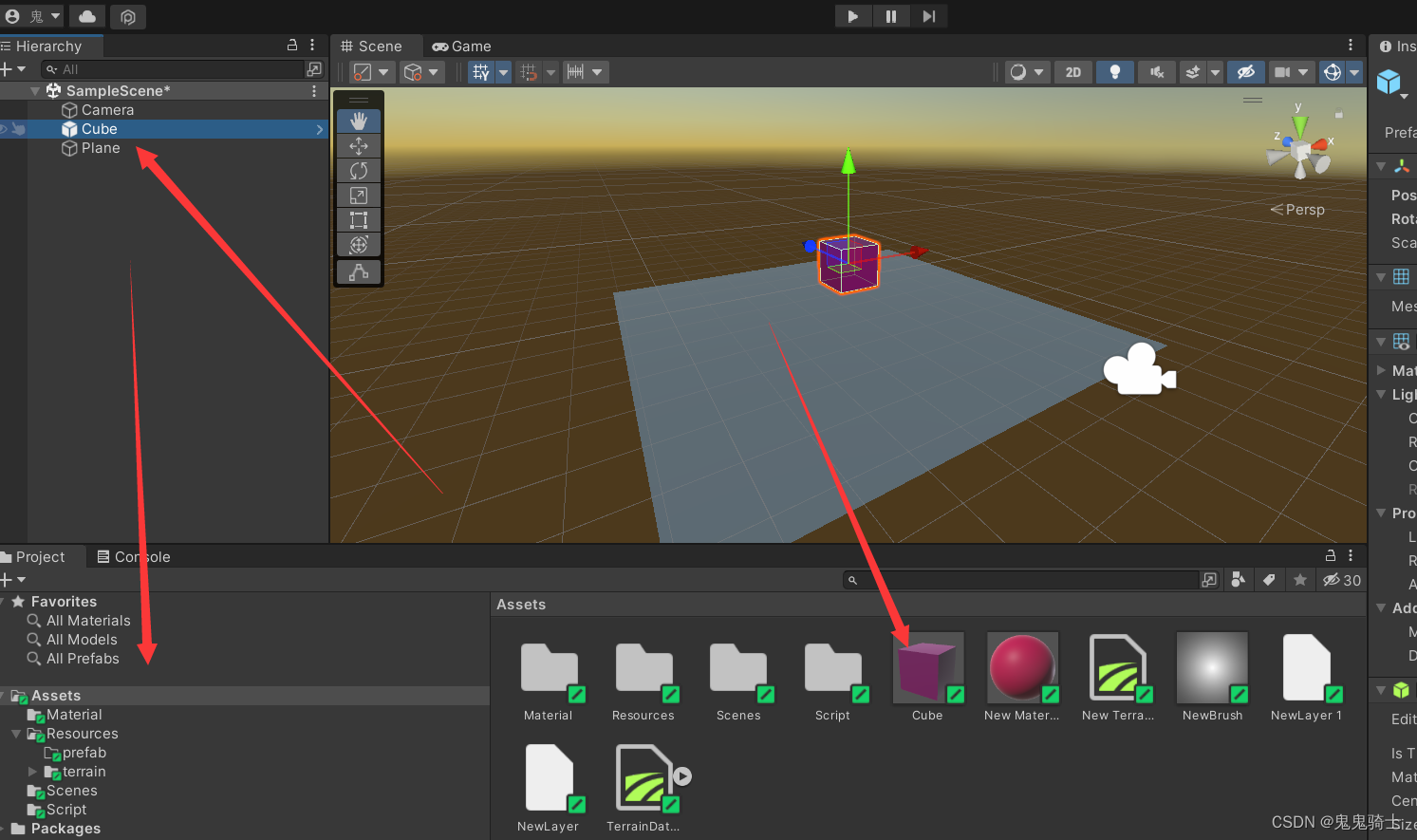
预设体
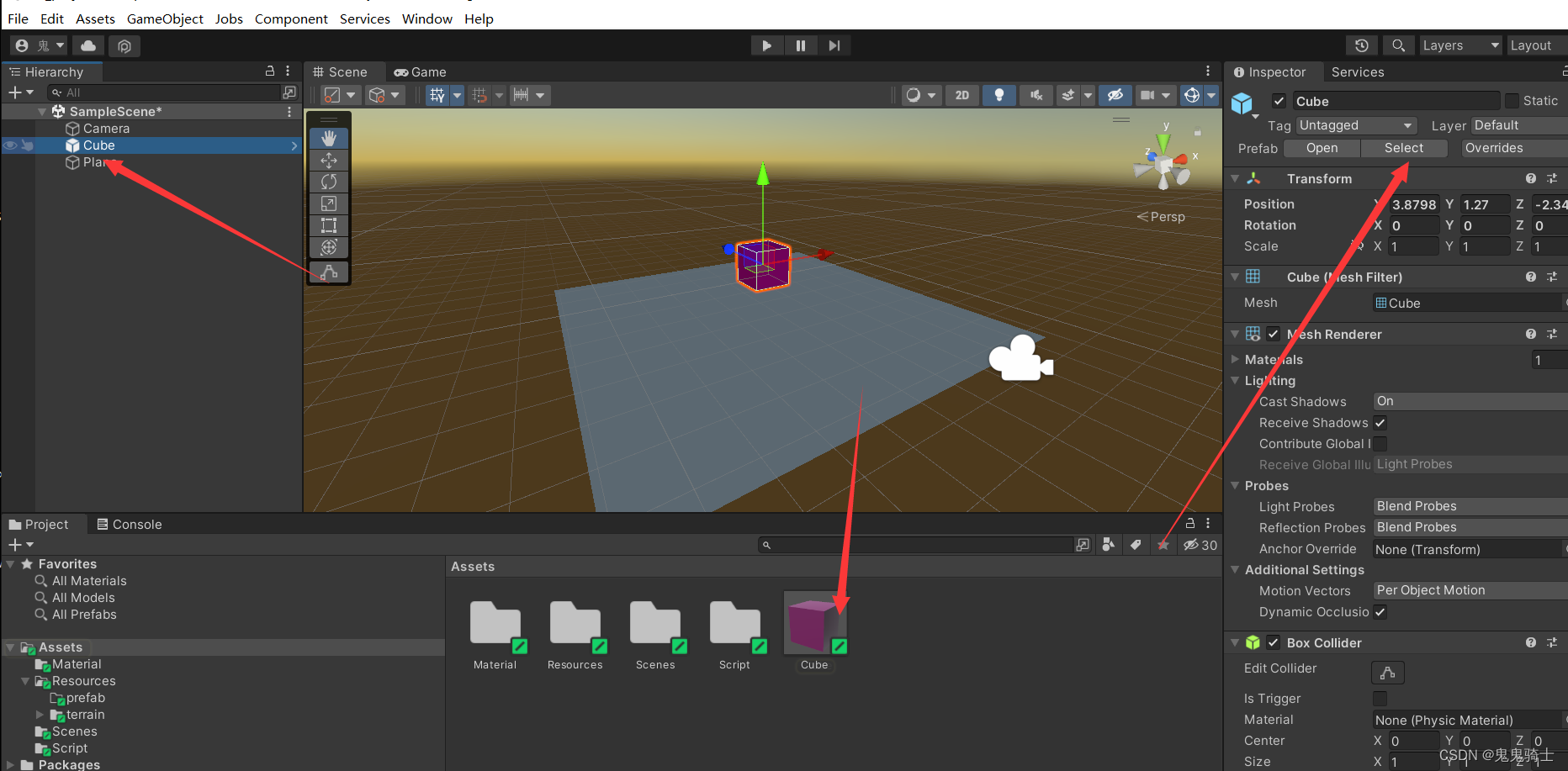
创建预设体(cocos相同)
拖下来即可
定位预设体文件位置
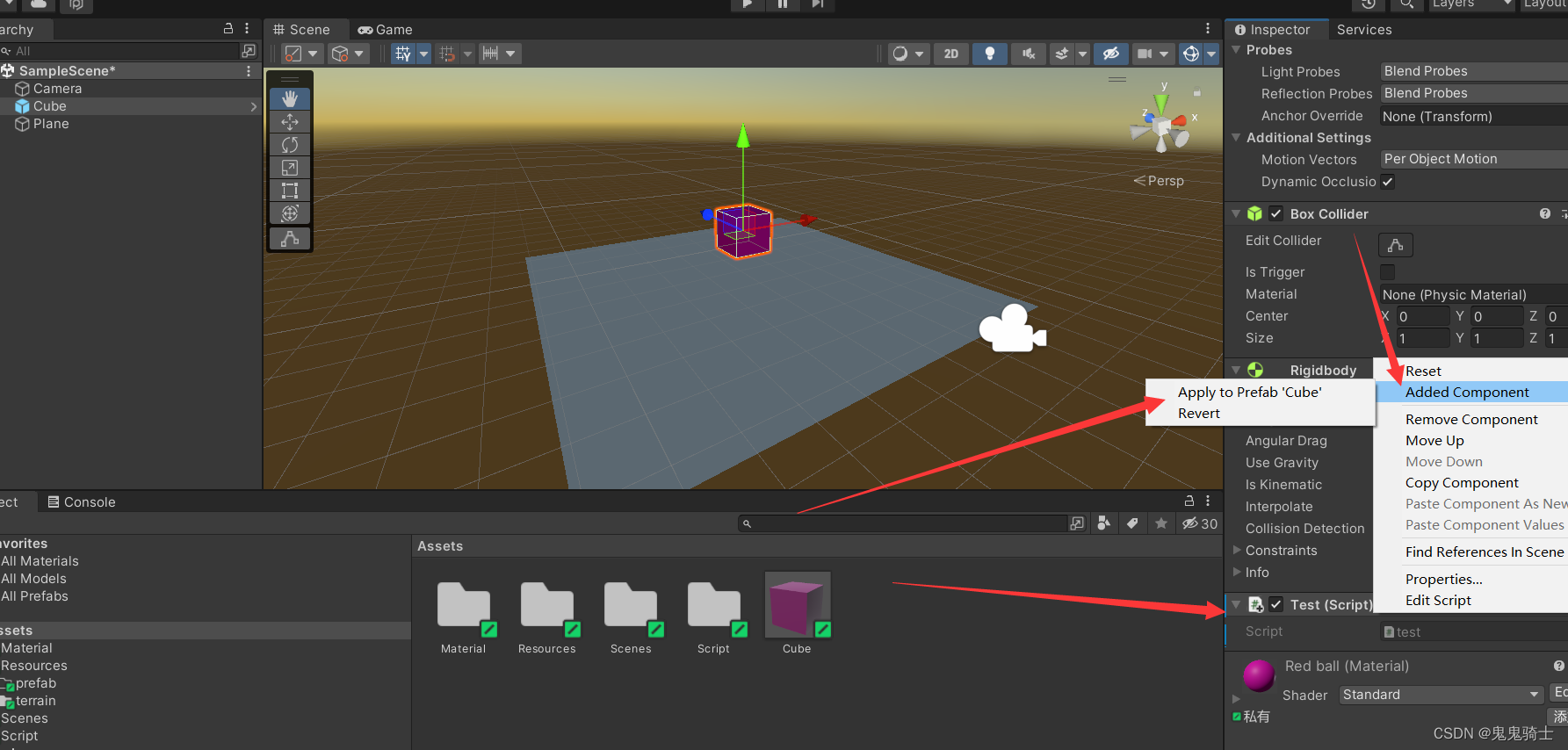
预设体添加、更新新内容
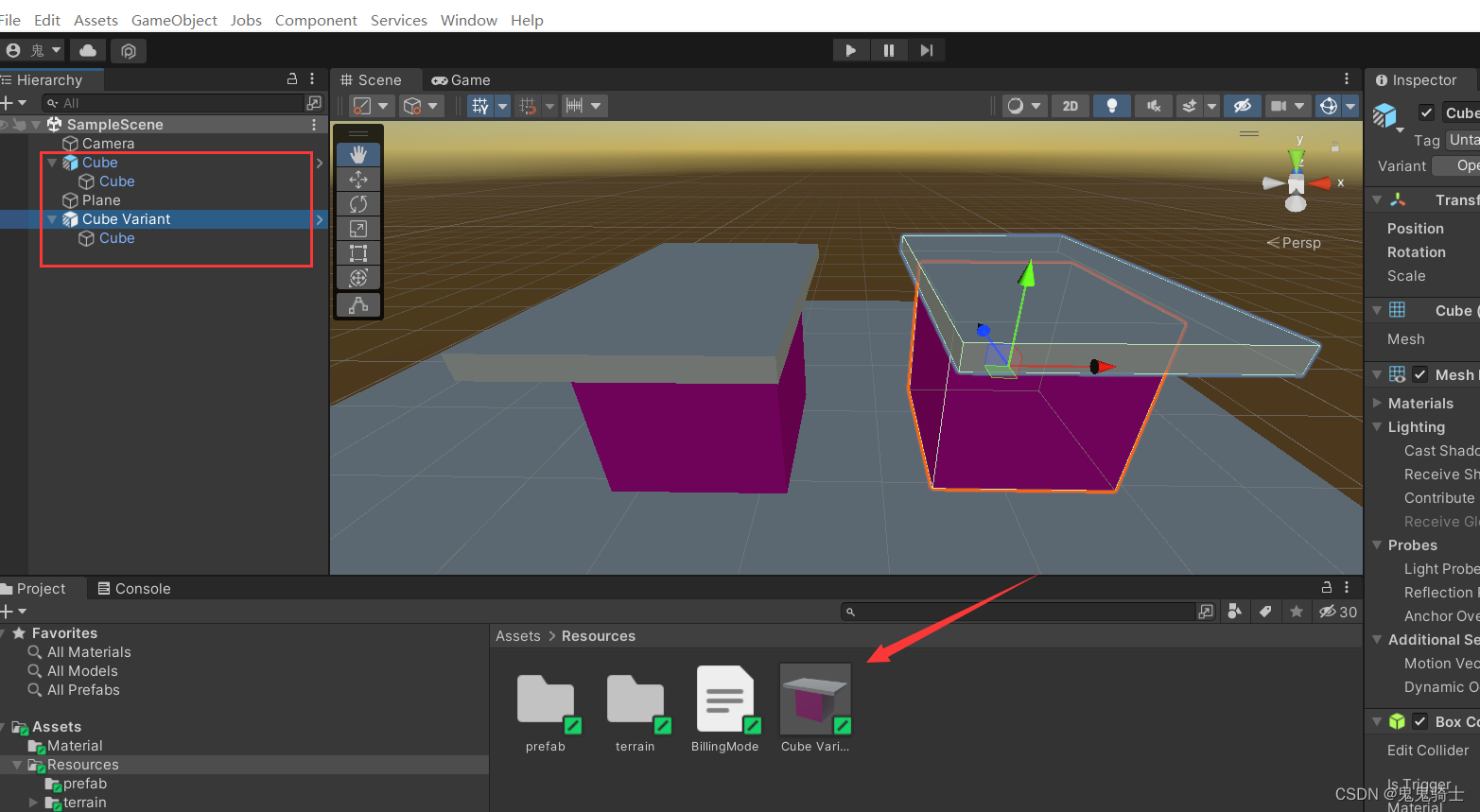
预设体变体
只做了解,后期使用时再测试
结构体
vector
using System.Collections;
using System.Collections.Generic;
using System.Numerics;
using UnityEngine;
using Vector3 = UnityEngine.Vector3;
public class VectorTest : MonoBehaviour
{
// Start is called before the first frame update
void Start()
{
//向量,坐标,旋转,缩放
Vector3 v = new Vector3();
//创建结构体
v = Vector3.zero;
v = Vector3.right;
Vector3 v2 = Vector3.forward;
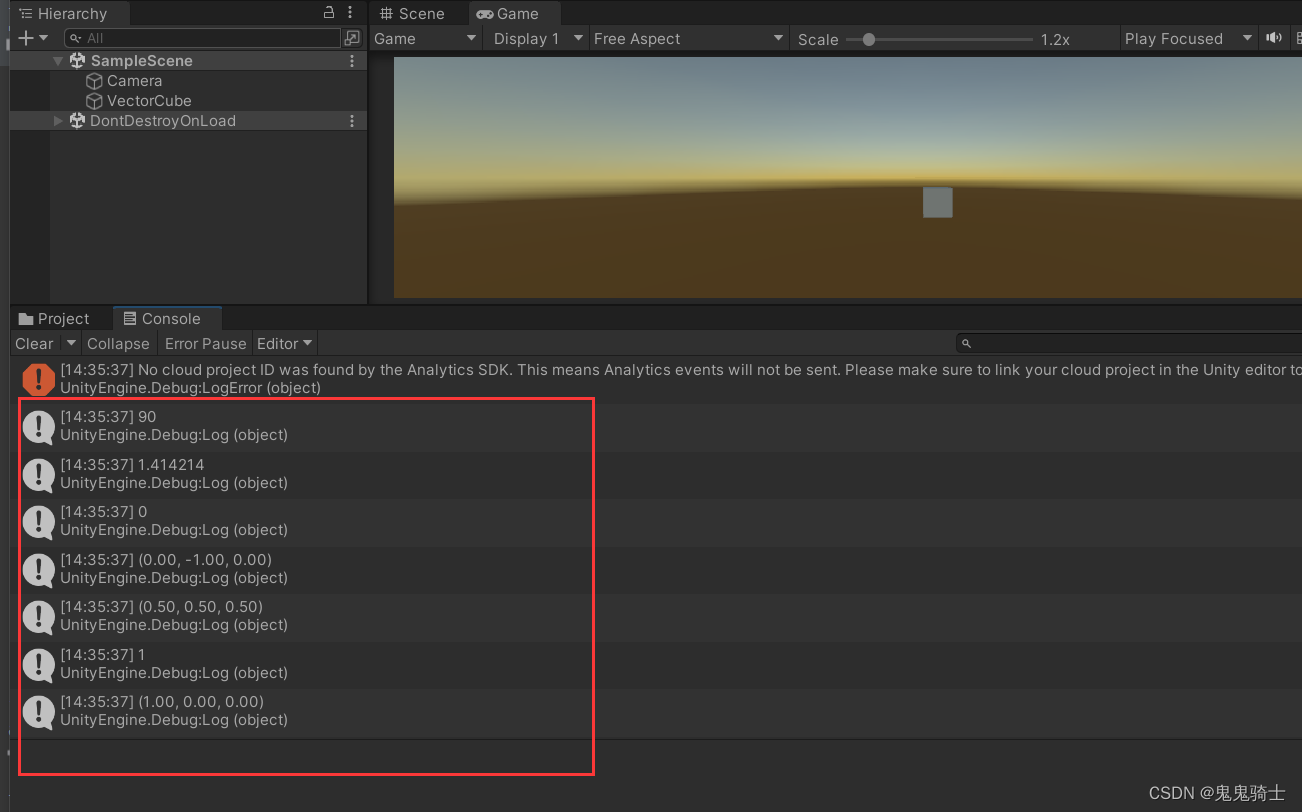
//计算两个向量夹角
Debug.Log(Vector3.Angle(v,v2));
//计算两点之间的距离
Debug.Log(Vector3.Distance(v,v2));
//点乘
Debug.Log(Vector3.Dot(v,v2));
//叉乘
Debug.Log(Vector3.Cross(v,v2));
//插值
Debug.Log(Vector3.Lerp(Vector3.zero,Vector3.one,0.5f));
//向量的模
Debug.Log(v.magnitude);
//规范化向量
Debug.Log(v.normalized);
}
// Update is called once per frame
void Update()
{
}
}
对象旋转
欧拉角,四元数
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class RotateTest : MonoBehaviour
{
// Start is called before the first frame update
void Start()
{
//旋转:欧拉角,四元数
Vector3 rotate = new Vector3(0,30,0);
//创建初始化旋转0,0的欧拉角
Quaternion quaternion = Quaternion.identity;
//通过欧拉角转为四元数
quaternion = Quaternion.Euler(rotate);
//四元数转为欧拉角
rotate = quaternion.eulerAngles;
//看向一个物体
quaternion = Quaternion.LookRotation(new Vector3(0, 0, 0));
}
// Update is called once per frame
void Update()
{
}
}