给定一个 n个点 m条边的有向图,点的编号是 1到 n,图中可能存在重边和自环。
请输出任意一个该有向图的拓扑序列,如果拓扑序列不存在,则输出 −1。
若一个由图中所有点构成的序列 A满足:对于图中的每条边 (x,y),x在 A中都出现在 y之前,则称 A是该图的一个拓扑序列。
输入格式
第一行包含两个整数 n和 m。
接下来 m行,每行包含两个整数 x和 y,表示存在一条从点 x到点 y 的有向边 (x,y)。
输出格式
共一行,如果存在拓扑序列,则输出任意一个合法的拓扑序列即可。
否则输出 −1。
数据范围
1≤n,m≤105
输入样例:
3 3
1 2
2 3
1 3
输出样例:
1 2 3
这道题我们的思路就是将我们图中所有的点都计算一下入度是多少,也就是有多少条边是指向当前的点的。
然后我们将所有入度为0的点放入我们的队列中。
然后遍历我们的队列,也就是依次从队列中取出一个元素,将其删掉,然后将这个点指向的边也全部都删掉,然后看看删掉之后,有没有新的点的入度为0,如果有的话,就加入我们的队列。
用一个vector记录我们每次删掉的元素
如果我们的vector的大小跟我们的点总数是相等的,那么我们就是可以得到一个拓扑序列的,只要将我们的vector中的内容全部打印出来就可以了。
如果vector的元素个数跟我们点的总数不相等的话,就返回-1.。
比方说下面这张拓扑图
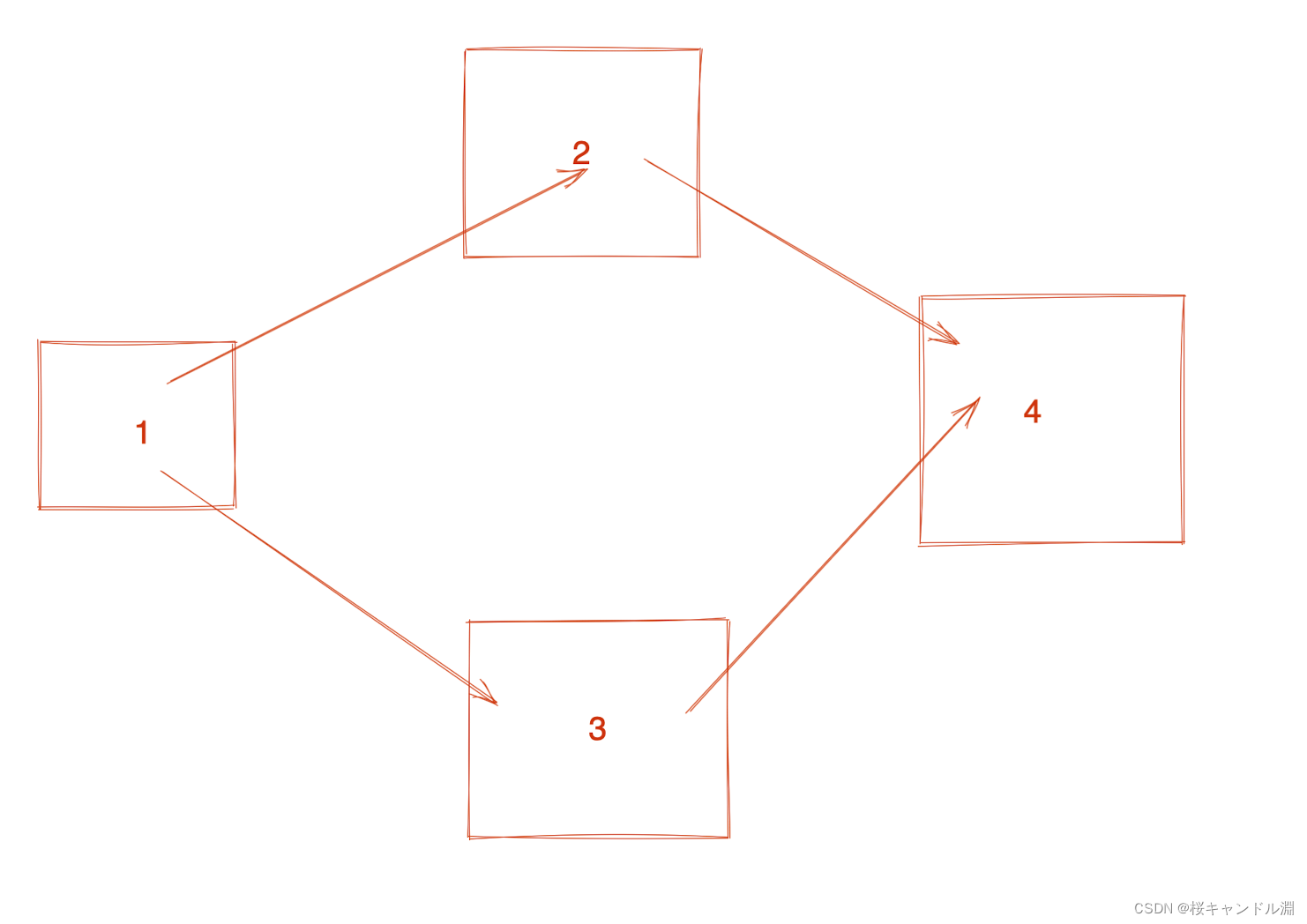
我们1的入度为0,我们就将1加入队列
(我们的队列每次都是取出一个队头的元素,这里就是取出1,也就是pop掉)
将1放入我们的vector中
1->
然后我们将1删掉
删掉之后,我们发现2和3的入度此时也变成了0
我们将2,3也加入我们的队列,然后将我们的2,3删掉
将2,3放入vector中
1->2->3
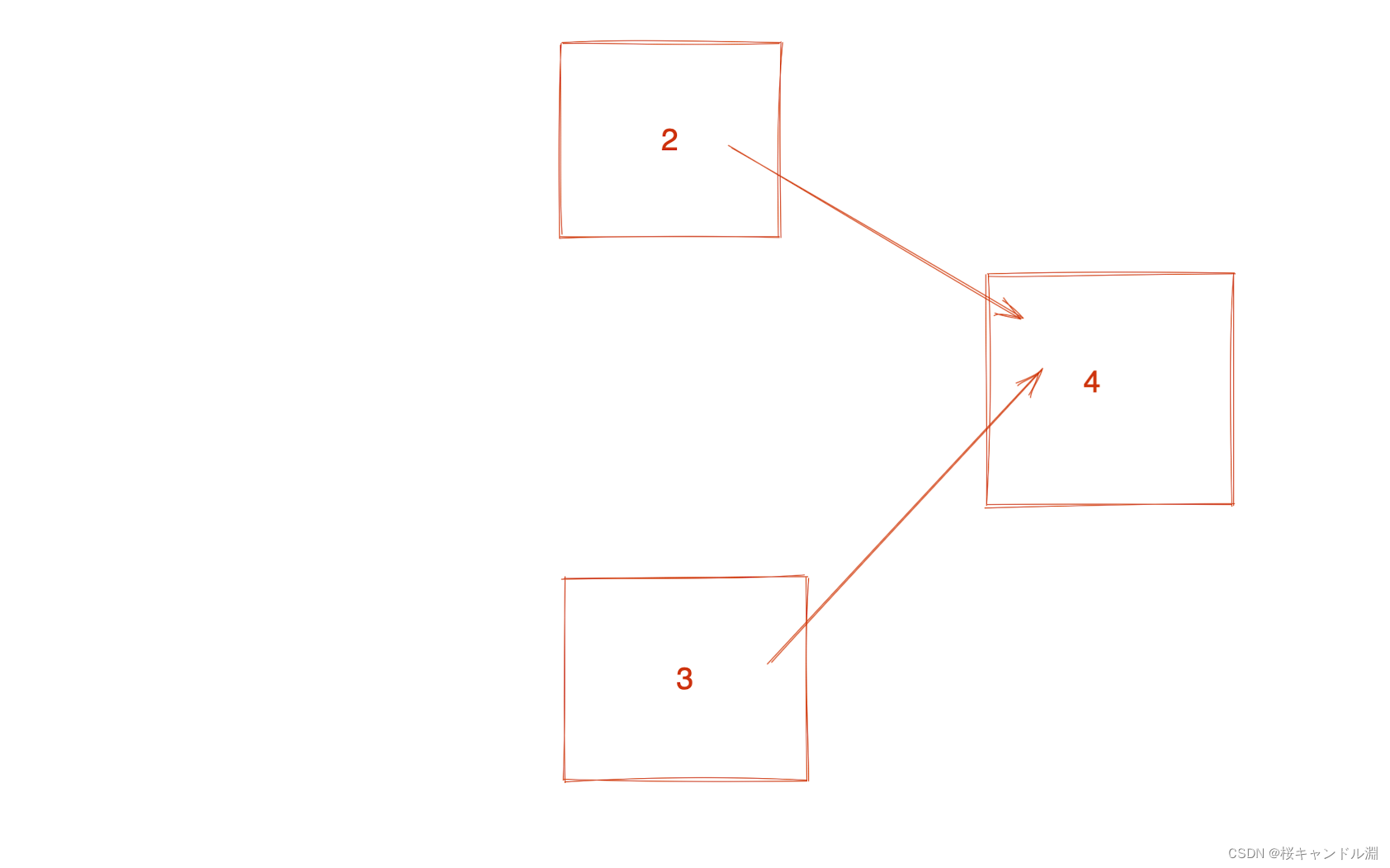
最后我们发现4的入度也为0,我们将4加入队列
将4放入vector中
1->2->3->4
然后我们发现没有点可以加入队列了,并且我们的队列在4被pop了之后也空了,此时我们发现vector的大小跟我们数据的个数是相等的,所以我们能够打印出我们的队列
#include<iostream>
#include<vector>
#include<list>
#include<map>
#include<queue>
using namespace std;
const int N=100010;
int number;
map<int,int> m1;
vector<list<int>> record(N,list<int>{});
void add(int a,int b)
{
record[a].push_front(b);
}
void topo()
{
int start_point;
queue<int> q1;
vector<int> v1;
for(auto&i:m1)
if(i.second==0) q1.push(i.first);
while(!q1.empty())
{
int head=q1.front();
q1.pop();
v1.push_back(head);
for(auto&i:record[head])
{
m1[i]--;
if(m1[i]==0)
{
q1.push(i);
}
}
record[head]={};
}
if(v1.size()==number)
{
for(auto&i:v1)
{
cout<<i<<" ";
}
cout<<endl;
}else{
cout<<-1<<endl;
}
}
int main()
{
int m;
cin>>number>>m;
while(m--)
{
int x,y;
cin>>x>>y;
add(x,y);
m1[y]++;
m1[x]+=0;
}
topo();
return 0;
}