目录
1.简介
1.1分类
1.2执行模式
2.运动学建模
2.1简述
2.2建模
2.2.1分量叠加
3.导航规划
编辑 4.路径规划
1.简介
1.1分类
按移动方式:轮式、履带式、足式、躯干式

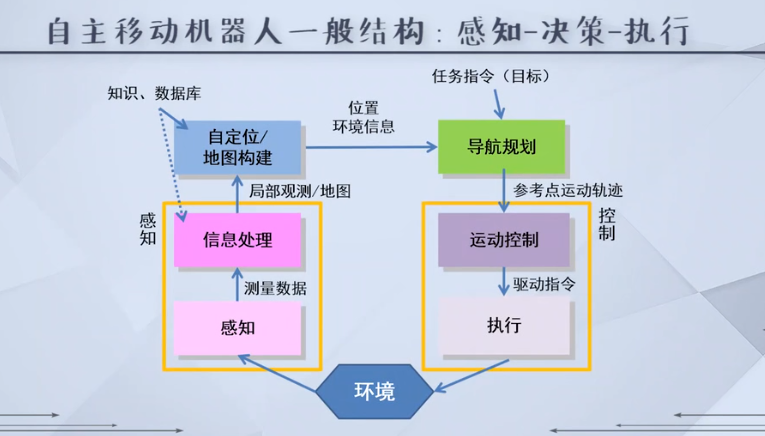
1.2执行模式
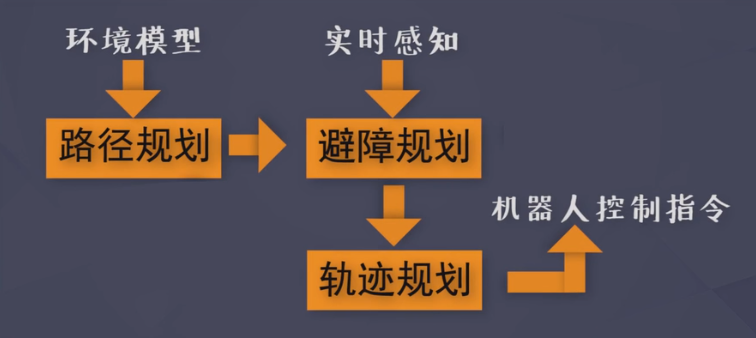
未知的环境中构建局部地图/已知环境则有地图,根据环境和定位信息进行导航规划(轨迹规划),运动控制单元控制运动,整个过程是一个串联的过程,现有环境,再导航,如果新的环境信息没有更新,会根据之前的信息进行导航及运动控制。
2.运动学建模
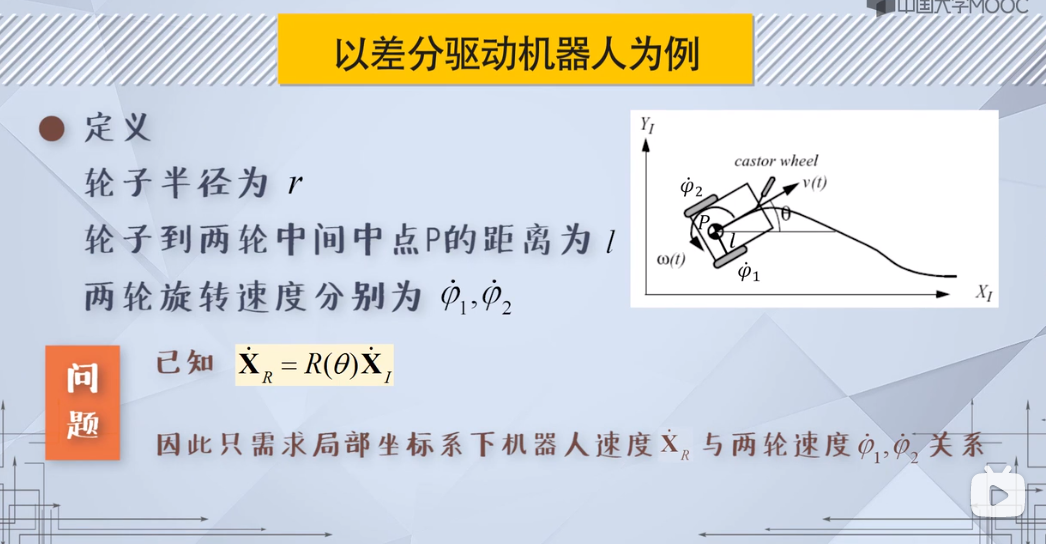
2.1简述
参考点运动控制、驱动运动控制都是以时间为变量的,位置、速度、加速度控制。参考点可以是质心,那么建模就是建立所有驱动单元和质心的关系。
以二轮小车为例:参考点选为两轮中心,需要建立的就是参考点和两轮的关系。
对机械臂:参考点为机械臂末端。

2.2建模
就是建立质心P(代表机器人)速度和两轮速度的关系。
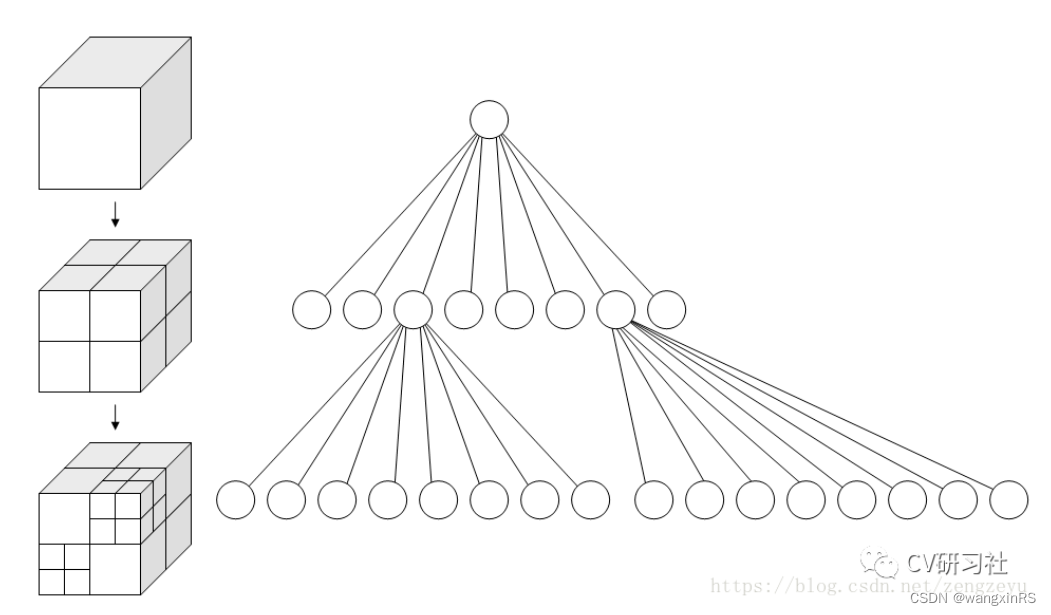
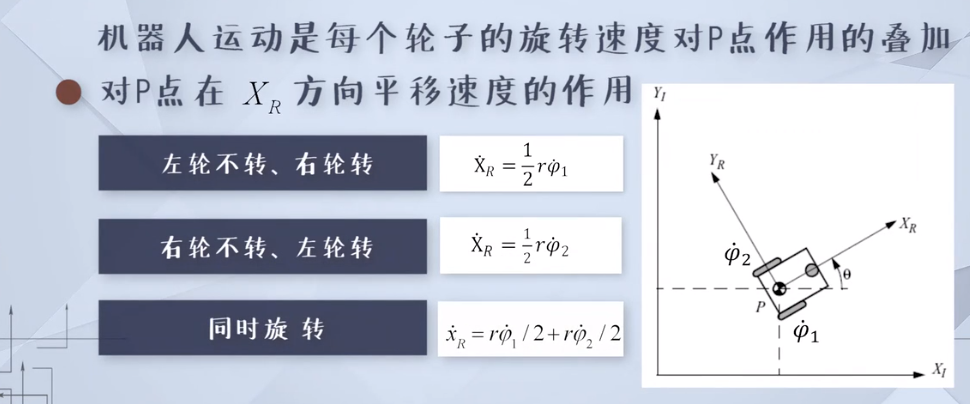
2.2.1分量叠加
在X方向,轮子移动方向和X方向一致。分别假设只有一个轮可以运动的情况,并计算其对质心P的影响,最后将所有影响叠加得到对X方向的作用
在Y方向,因为轮子移动方向和Y垂直,所以在Y方向速度为0.

再看一下二者旋转分量,同样分别假设只有一个轮子可以移动。注意两个方向不同,计算要用正负号区别。
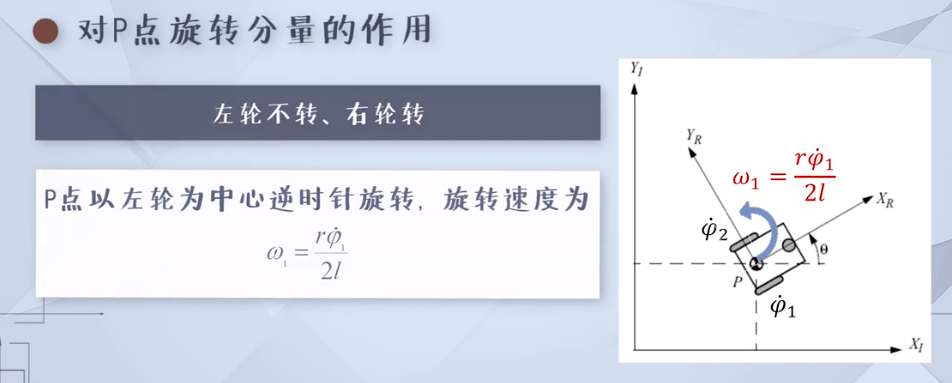

最终结果:

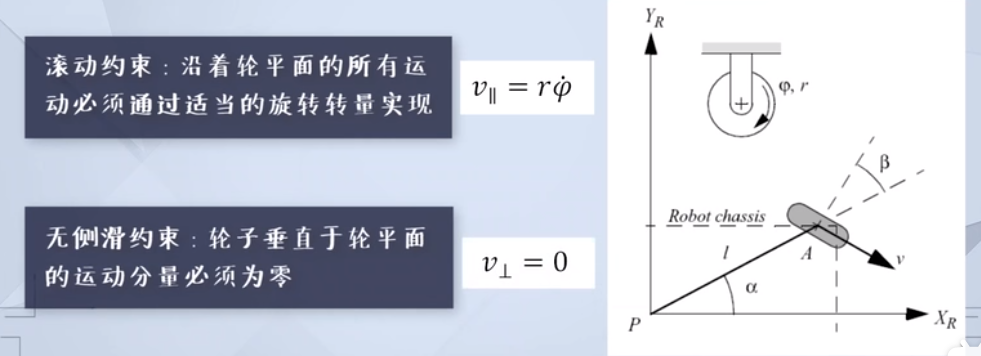
约束:

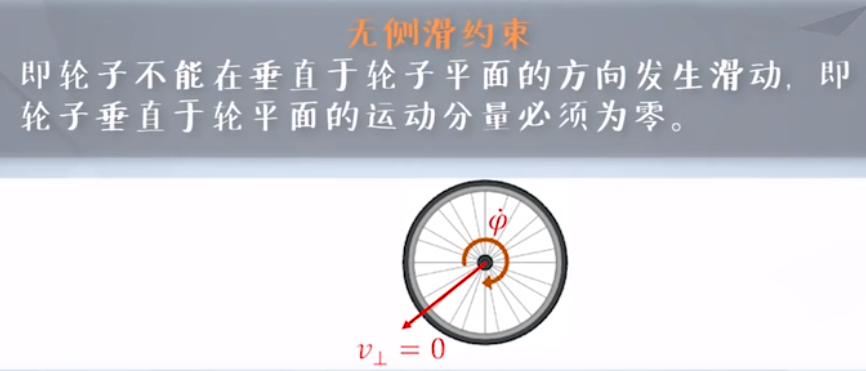
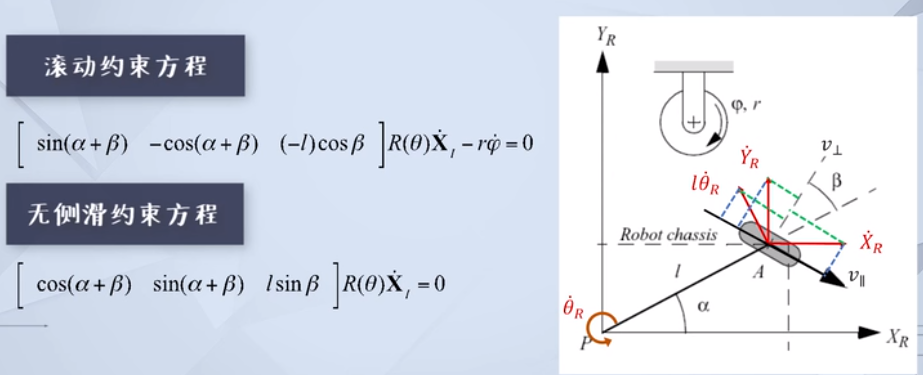
数学公式表示两个约束:
3.导航规划
分类(侧重无标识导引)
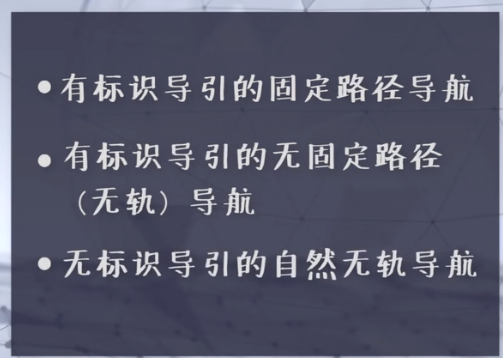
无标识导引规划:路径规划、避障规划、轨迹规划,参照第二个图个人理解就是,路径规划给出机器人到达目标点可以实现的不同路线,避障规划引进一定实时性,在到达目标点的过程中,新出现了障碍物,及时调整路线,轨迹规划,是根据前面得到的路线,再微分成机器人运动所需的位置,速度,加速度等信息。此外,如果在速度空间内,路径规划可以和避障规划单独结合,地图已知,没有新增障碍时,路径规划直接和轨迹规划结合(分的太细了,感觉没必要)

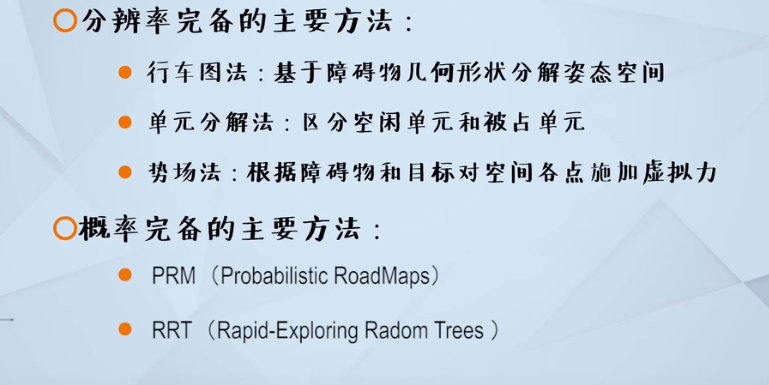
 4.路径规划
4.路径规划
主要方法:
参考文献
1.[3.1.1]--第五讲避障规划_哔哩哔哩_bilibili