目录
- 1. 八叉树(Octree)
- 2. 简单使用
参考博客《三维点云数据的两种结构Kdtree和Octree》和《八叉树》
1. 八叉树(Octree)
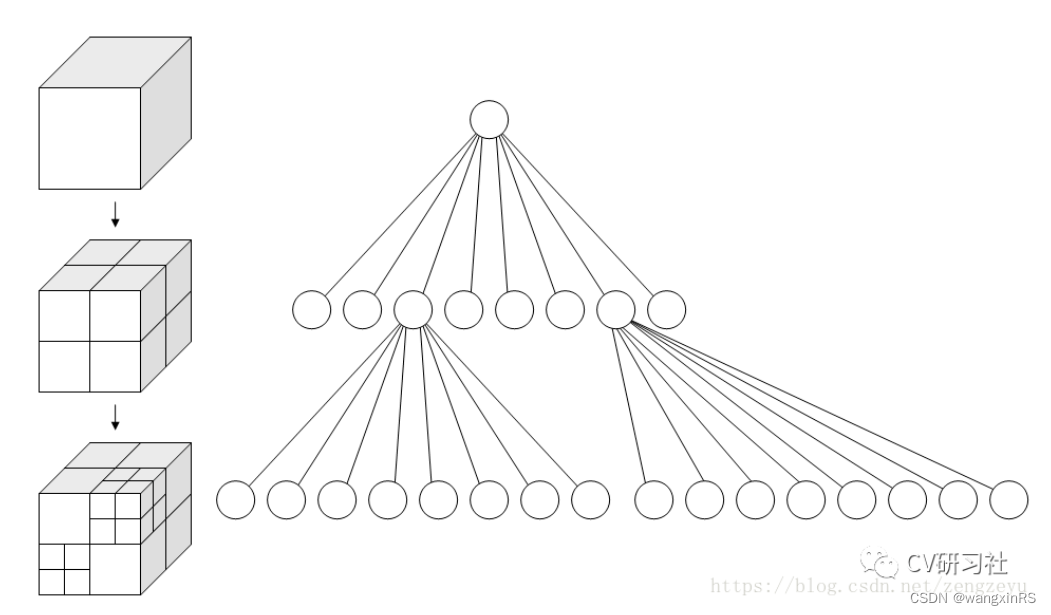
只需要考虑三维情况下的八叉树的情况,如下
- 设置最大的递归深度;
- 找出场景的最大尺寸,并据此创建第一个立方体
- 若未到达最大递归深度,判断当前立方体是否完全空白,或者完全为目标包含,若满足,则该立方体停止分裂;若不满足,则将立方体进一步分割为8个子立方体;
- 对于每一个子立方体,返回步骤3。
2. 简单使用
代码主要参考双愚的代码
- octree_search.cpp
#include <pcl/point_cloud.h>
#include <pcl/octree/octree.h>
#include <iostream>
#include <vector>
#include <ctime>
int main (int argc, char** argv)
{
srand((unsigned int)time(NULL));
// 创建点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
cloud->width = 1000;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
for (size_t i=0; i<cloud->points.size(); ++i)
{
cloud->points[i].x = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].y = 1024.0f * rand() / (RAND_MAX + 1.0f);
cloud->points[i].z = 1024.0f * rand() / (RAND_MAX + 1.0f);
}
// 创建octree对象
float resolution = 128.0f; // 八叉树中最小尺寸(分辨率)
pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(resolution);
octree.setInputCloud(cloud);
octree.addPointsFromInputCloud();
// 创建搜索点searchPoint
pcl::PointXYZ searchPoint;
searchPoint.x = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.y = 1024.0f * rand() / (RAND_MAX + 1.0f);
searchPoint.z = 1024.0f * rand() / (RAND_MAX + 1.0f);
std::cout << "Neighbors within voxel search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z << ")"
<< std::endl;
// 任务一:给定搜索点searchPoint,输出该点所在体素内的其他点
std::vector<int> pointIdxVec;
if (octree.voxelSearch(searchPoint, pointIdxVec))
{
for (size_t i = 0; i < pointIdxVec.size(); ++i)
std::cout << " " << cloud->points[pointIdxVec[i]].x
<< " " << cloud->points[pointIdxVec[i]].y
<< " " << cloud->points[pointIdxVec[i]].z << std::endl;
}
// 任务二:给定搜索点searchPoint,输出离该点最近的10个点
int K = 10;
std::vector<int> pointIdxNKNSearch; // 10个点在点云中的index
std::vector<float> pointNKNSquaredDistance; // 10个点
std::cout << "K nearest neighbor search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with K=" << K << std::endl;
if (octree.nearestKSearch(searchPoint, K, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxNKNSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxNKNSearch[i]].x
<< " " << cloud->points[pointIdxNKNSearch[i]].y
<< " " << cloud->points[pointIdxNKNSearch[i]].z
<< " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
}
// 任务三:给定搜索点searchPoint,输出该点一定半径内的所有其他点
std::vector<int> pointIdxRadiusSearch;
std::vector<float> pointRadiusSquaredDistance;
float radius = 256.0f * rand() / (RAND_MAX + 1.0f);
std::cout << "Neighbors within radius search at (" << searchPoint.x
<< " " << searchPoint.y
<< " " << searchPoint.z
<< ") with radius=" << radius << std::endl;
if (octree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0)
{
for (size_t i = 0; i < pointIdxRadiusSearch.size(); ++i)
std::cout << " " << cloud->points[pointIdxRadiusSearch[i]].x
<< " " << cloud->points[pointIdxRadiusSearch[i]].y
<< " " << cloud->points[pointIdxRadiusSearch[i]].z
<< " (squared distance: " << pointRadiusSquaredDistance[i] << ")" << std::endl;
}
}
- CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(cloud_viewer)
find_package(PCL 1.2 REQUIRED)
add_executable(octree octree.cpp)
target_link_libraries(octree ${PCL_LIBRARIES})