专栏文章:
深蓝学院-多传感器融合定位课程-第1章-概述_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第2章-3D激光里程计I_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第3章-3D激光里程计II_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第4章-点云地图构建及基于地图的定位_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第5章-惯性导航原理及误差分析_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第6章-惯性导航解算及误差模型_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第7章-基于滤波的融合方法I_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第8章-基于滤波的融合方法Ⅱ_goldqiu的博客-CSDN博客
github保存了相关代码和学习笔记:
https://github.com/goldqiu/Shenlan-Course-Multi-Sensor-Fusion-for-Localization-Mapping/tree/main/%E7%AC%AC9%E7%AB%A0%EF%BC%9A%E5%9F%BA%E4%BA%8E%E5%9B%BE%E4%BC%98%E5%8C%96%E7%9A%84%E5%BB%BA%E5%9B%BE%E6%96%B9%E6%B3%95
第9章:基于图优化的建图方法
课程内容
代码、PPT、视频见文件夹
课程笔记
基于预积分的融合方案流程
优化问题分析

预积分的作用

基于预积分的建图方案流程
由于此处讨论的优化方案包含组合导航系统,且认为外参已标定,因此会和常见的lio/vio中的方案有所不同,它不包含以下内容:
1) 初始化lidar和IMU之间的外参; (已标定)
2) 初始化速度、陀螺仪bias等;(组合导航已经解决了这些问题,一般会提供)
3) 初始化重力; (有了经纬高可以通过公式得到重力加速度)
4) 世界坐标系对齐(组合导航已经对齐)。

预积分模型设计





新的预积分值=老的预积分值+根据bias的变化量算出的新的预积分结果
预积分在优化中的使用
使用方法

残差设计


残差雅可比的推导
姿态残差的雅可比






预积分方差计算

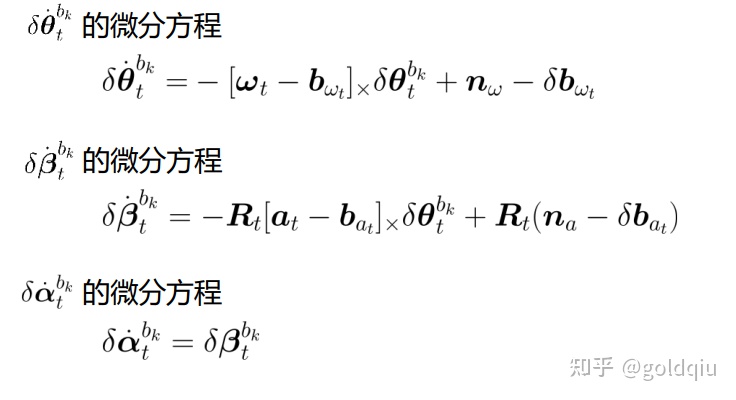

离散时间下的传递方程









预积分更新

典型方案介绍
LIO-SAM介绍
论文名称:LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping 代码地址:https://github.com/TixiaoShan/LIO-SAM
最大特点:分两步完成,先通过点云特征计算出相对位姿,再利用相对位姿、IMU预积分和GPS做融合。 相比于直接一步做紧耦合,大大提高了效率,而且实测性能也很优异。
代码讲解
融合编码器的优化方案
整体思路介绍

预积分模型设计



imu的bias比起编码器,需要考虑的原因是IMU具有零偏重复性和随机游走。
作业
在IMU的预积分中,课程只提供了残差对部分变量的雅可比,请推导残差对其它变量的雅可比,并在建图流程的代码中补全基于IMU预积分的融合方法中的待填内容,随后与不加IMU融合时的效果进行对比。
备注: 1) 对比是全方位的,既包括轨迹精度的对比,也包括地图质量的对比(因为IMU会增加估计的平滑性); 2) 由于数据集的老问题,部分指标可能与预期不一致,且地图质量无法量化,因此给出自己的分析即可。
评价标准: 及格:公式推导正确,补全代码之后功能正常; 良好:在及格基础上,实现和不加IMU时的效果对比和分析; 优秀:在良好的基础上,完成融合编码器时预积分公式的推导(方差递推、残差对状态量雅可比、 bias更新等) 。
附加题(不参与考核):
基于预积分的融合编码器的方法,近年来层出不穷,众多论文中给出了众多方法,请调研相关文献, 梳理不同的推导思路,并从原理上对比各种方案的不同于优缺点。 如有余力,在优秀作业的基础上,实现不同方案,并对比效果。





![[附源码]Python计算机毕业设计Django酒店客房管理系统](https://img-blog.csdnimg.cn/f7ceac33b0ff402383eaaa0c5834cbe7.png)
![[附源码]Nodejs计算机毕业设计基于大学生兼职系统Express(程序+LW)](https://img-blog.csdnimg.cn/cce5b46e085a495c8fc48ae1c264b587.png)



![[操作系统笔记]页面置换算法](https://img-blog.csdnimg.cn/b9d3acb1c98649c7a8bb3ad12024b96b.png)