原创 | 文 BFT机器人

方飞,高中毕业于江苏省常州高级中学,于2007年进入清华大学电子工程系攻读学士学位,2011年本科毕业后赴美国南加州大学计算机系攻读博士,主要从事安全博弈研究,师从安全博弈领域的权威专家 Milind Tambe,方飞的研究方向是人工智能和多智能体系统,致力于将机器学习与博弈论相结合。
方飞认为AI技术应该被运用到实际的问题当中。因此她设计的人工智能系统也在反偷猎领域做出了重要的贡献,她利用机器学习算法和博弈论模型,设计出智能系统PAWS (Protection Assistant for Wildlife Security,“野生动物安全的保护助手”) 系统,旨在保护野生动物。
我们面临着一个严峻的事实,许多野生动物因为它们的皮毛、骨头、器官等具有商业价值而成为了猎杀的目标,因此尽管我们一直在打击非法猎捕和贩卖野生动物的行为,但野生动物仍然面临着许多威胁和挑战。
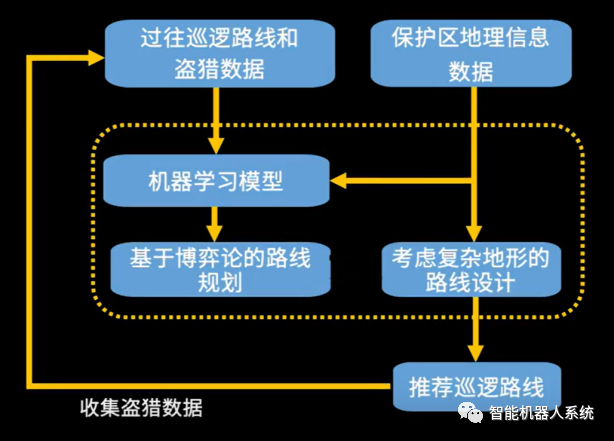
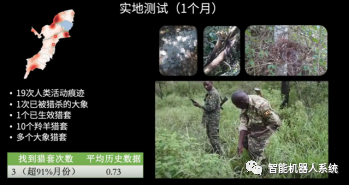
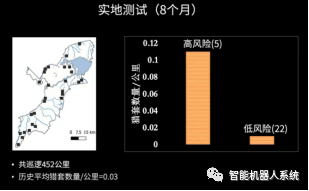
而方飞设计的PAWS系统能够通过分析大量的数据和行为模式,快速准确地识别出偷猎者的活动,帮助动物保护区制定随机巡逻路线,提高搜捕盗猎的痕迹,从而大幅降低了盗猎比率,随着时间的推移,PAWS系统不断升级和改进,其功能也不断扩展,除了识别偷猎者的活动,该系统还能够实时监测动物的行为和迁徙模式,进一步提高对野生动物的保护效果。
通过分析动物的移动模式和社交网络,PAWS系统能够预测未来可能发生的风险,并及时采取措施来防止捕猎活动的发生,方飞的研究不仅提高了反偷猎的效果,也为保护珍稀野生动物做出了贡献。
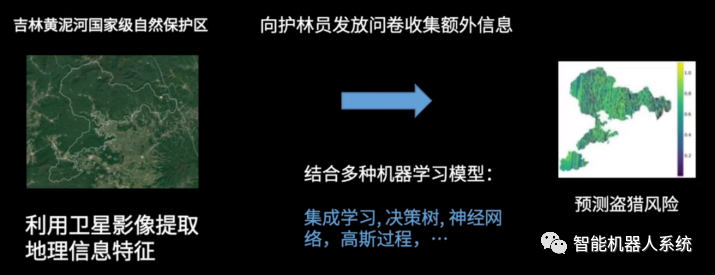
在构建系统时,方飞团队除了收集当地保护区的巡护团队所记录的以往数据资料以外,还通过收集公开的数据集、卫星图片上的海拔信息等收集地理数据,但由于对地形的不熟悉,他们首先是用一个简单的理论模型,把整个区域划分成 1km * 1km 的格子,让巡逻人员从格子 A 走到格子 B。
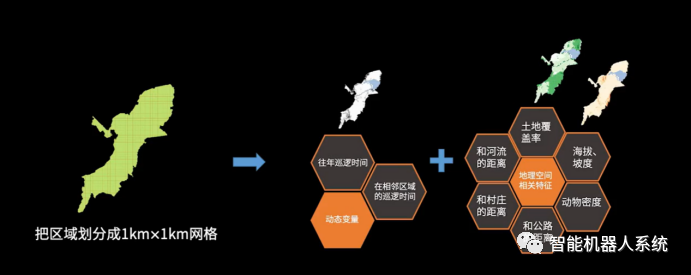
后来保护区反馈规划的路线没法走,因为从格子 A 到格子 B 之间隔了一座大山,所以团队通过实地考察创立了能够更好处理实际地貌信息与生成符合地貌的巡逻路线的算法。
在反盗猎领域,世界野生动物基金会(WWF)提出了一个旨在实现零偷猎的目标。为了达到这个目标,他们提出了六个方面的工作需要进行,其一是通过加强巡逻来减少盗猎活动的发生,方飞希望能够跟这些动物保护组织一起能够在多个方面合作,为他们提供计算工具,以帮助他们更好地实现或接近 零盗猎的目标。
方飞相信,通过科技和人工智能的力量,我们可以更有效地保护野生动物的生存环境,减少盗猎行为的发生,为珍稀野生动物创造更美好的未来。她将继续努力,致力于在反偷猎领域做出更多的贡献,为野生动物保护事业做出更大的影响。
初稿 | 音音
终稿 | 居居手
排版 | 居居手
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。