摘要:
激光雷达的优点显而易见,但如何结合算法发挥出激光雷达的优势,我想除了主机厂以外,激光雷达厂商也可以主动参与,主动探索先进的融合感知算法,向行业不断证明:我不是个“花瓶”。
激光雷达之于自动驾驶,我依旧是坚定地有用论支持者;但是激光雷达之于辅助驾驶,我一直持观望态度,也一直想弄明白:那些硬件配置上拥有激光雷达的车型,对其辅助驾驶功能到底发挥了多大作用呢?
为了解答这个疑惑,42号车库还专门对特斯拉Model Y(视觉+毫米波雷达配置)和理想L7 Max(带激光雷达配置)做了对比测试,测试结果如图1。

图1 42号车库有无激光雷达车型测试对比结果
测试过程看起来公平公正,测试结果也揭示了特殊场景下(水马横向阻拦、施工牌横向阻拦、水马锥桶斜列)有激光雷达配置的理想L7 Max表现更加优秀,而纯视觉配置的特斯拉狗屎不如,并由此得出激光雷达真是“好”、激光雷达真是“妙”。
但冷静下来仔细想了想,发现这个对比其实无法得出激光雷达发挥了巨大作用的结论,有没有可能是以下原因:理想L7 Max的视觉感知针对特殊场景进行了专门训练,而特斯拉没有对这三个特殊场景进行专门训练?
而随着后面几起误识别事件的发生,我有点坚信了自己的片面观点:此时此刻,激光雷达在辅助驾驶领域还是“花拳绣腿”。
第一起
2023年5月,四川甘孜,一位车主驾驶理想汽车在路上正常行驶时,车速突然从80km/h降到20km/h,最后刹停。事后理想汽车售后客服回应称:是因为激光雷达有一个视觉感知的效果,所以把广告牌上准备起跑的人物,识别成了在路中间的真人,所以才紧急刹停,具体原因需要工程师做分析诊断。
那个广告牌如图2所示,广告牌上起跑的是百米飞人苏炳添,也不知道百米冲刺是苏炳添快还是理想L7快。截止写这篇文章的时候,还没有找到理想汽车关于这次误识别的工程师版分析结论。既然理想汽车的工程师没时间分析,那我就试着造次一番,不负责任地分析一下。

图2 被理想汽车误识别的广告牌
本次误识别的主角是理想L7 Max,装配的是AD Max,配置有一个128线激光雷达,6颗800万像素摄像头、5颗200万像素摄像头、1个前向毫米波雷达。激光雷达FOV为120°x25°,覆盖车辆正前方视野,10%发射率条件测距能力可达200m。
从车主提供的视频中截取了一帧,如图3,当时危险警示灯(双闪)激活,且ACC图标为灰色,说明车主并未使用ACC或ACC在紧急制动触发后退出,由此推断应该是AEB误触发了。
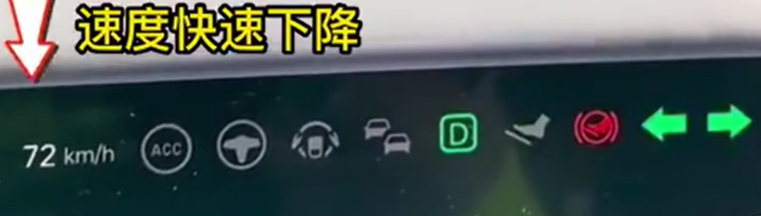
图3 误识别视频中车辆状态截图
而理想汽车的AEB有啥特殊之处呢,是发布会上CEO曾浓墨重彩介绍过的自研功能,是行业内首个融合激光雷达的AEB功能。这意味着,理想L7 Max AEB功能的感知输入将来自宇宙最豪华的组合:激光雷达+毫米波雷达+摄像头。
将图2广告牌和图4车体海报中的假人识别成真人是摄像头擅长干的蠢事,我们已经司空见惯、见怪不怪,传统毫米波雷达也无法区分高空的显示牌是在空中还是地面上,所以如果只有摄像头+毫米波雷达的感知输入,AEB在这种情况下激活,不仅情有可原,而且合理合法。

图4 车体广告上的假人
但是,从激光雷达的点云中是可以计算出广告牌离地有多高、离车有多远,做的用心一点,可能还能识别出这是个广告牌。所以结论显而易见,激光雷达在此场景的感知结果要么置信度被设置过低,要么就根本没有做融合。
就是白瞎了这颗128线的激光雷达,该上阵杀敌,却被死死按在板凳上,这不妥妥的秦桧行为吗!
第二起
2023年3月清明节前夕,一位车主开着理想L9 Max去陵园祭祖,墓区明明没人,但车内中控显示屏上却全是人影、甚至出现骑自行车的,如图5所示,车主一度以为老祖宗显灵,十分激动。随后理想汽车工作人员表示,出现该情况可能是因为信号问题而出现了识别算法错误,问题正在进一步分析。
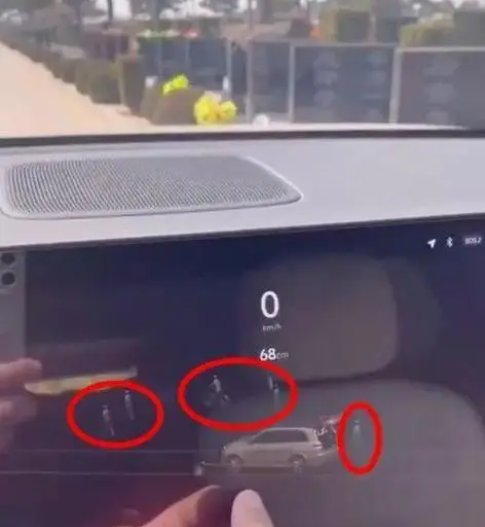
图5 理想L9在陵园墓区内误识别出行人和骑行者
同样,没蹲到理想汽车的官方分析结果,那我就勇敢地继续以下犯上,试着乱分析一通。理想L9 Max的感知硬件配置和理想L7 Max一样,都有一颗覆盖前方120°视野的128线激光雷达,如图6所示。

图6 理想L9 Max和L7 Max上的激光雷达视场角示意图
首先陵园误识别出人不是什么新鲜事,老大哥特斯拉早在2021年2月就吃过这方面的亏,一位特斯拉车主在路过陵园时,明明墓区空空荡荡、周边空无一人,他的屏幕上,却突然晃入了一个人影,如图7所示。

图7 特斯拉在陵园墓区内误识别出行人
这是当前视觉算法的缺陷,对于未训练的物体,很难准确识别出来;而当某一物体和之前训练过的物体有较大相似度时,就容易误识别,比如将墓碑识别为人,比如将花圈识别为人。
所以当看到理想L9 Max在其右后方和正后方误识别出行人和骑行者时,我是理解的,顶多抱怨一下怎么不好好研究一下老大哥特斯拉踩过的坑。但当看到正前方也误识别出行人,我是愤怒的:降低整车颜值、风阻系数、让消费者多花钱的激光雷达,是一点没发挥作用呀!
激光雷达为何物,一种可以提供稠密3D点云、非常精确地测量物体在3D空间中的位置和形状的传感器,而这些正是摄像头和毫米波雷达所欠缺的。使用的激光雷达3D物体检测算法,哪怕不用基于模型的,就是基于规则的,理论上也能把墓碑和行人给区分开。
假设激光雷达和摄像头的算法都将墓碑识别成人了,但这个时候从毫米波雷达的直接速度信息或者激光雷达的间接速度信息,应该得出这是一个静止的人,而不是一个行走的人,所以真的无法理解为什么有用的信息一个没有用上。
本为解决更多Corner Case而上的激光雷达,这个时候却临阵逃脱;本为提高场景泛化能力的多传感器融合,这个时候却哑然熄火,那么真相可能只有一个,多传感器融合,融合了个寂寞。
同一厂家的二起误识别案例其实并不具有普遍性,但为了自圆其说,我还是要硬着头皮再分析一下激光雷达为什么在辅助驾驶功能上还未发挥出应用的价值。
(1)被老大哥特斯拉的纯视觉技术路线“裹挟”
令人欣慰的是,辅助驾驶的技术路线相对前两年有了一定程度的收敛,技术路线收敛也是产品大规模落地的重要标志之一,当然,部分功劳一要归老大哥特斯拉在其AI Day的无私奉献,二是归高精地图自己的不争气。
从HydraNets、Transfomer、BEV到Occupancy Network,特斯拉一年一度的“演唱会”总能引起东方迷妹们的尖叫,但是大家发现没,特斯拉的技术路线是基于其8个摄像头进化的,从来未考虑过激光雷达的事,而为了让感知更纯粹,甚至相继干掉了毫米波雷达、超声波雷达。
人们可能会有疑惑,特斯拉没在这套技术路线中考虑激光雷达,不代表我们不可以,这个我是承认的,且已有专家指出基于BEV更适合异构传感器融合。但关键是,国内厂商有这个时间、资源和精力吗? 特斯拉的每一届AI Day公布的技术路线,国内厂商基本都需要消耗两年左右时间从Demo到工程落地,再用一年左右完成从可用到好用的量产优化,追赶尚且都来不及,哪有多余时间去预研基于BEV空间的异构传感器融合,当前,这不是否认国内厂商的努力和热情,只是我确实没看到有谁走出了引领潮流的技术路线。今天Transformer火,我就投入资源研究Transformer,明天大模型火,我再投入资源研究大模型。
所以,当有厂商成功将激光雷达感知结果与相机、毫米波雷达感知结果融合作为自研AEB算法的输入时,CEO都会在发布会上浓墨重彩地介绍。但令人惊掉汗毛的是,该车上市4个月后,汽车媒体“有驾”就在夜间举行了AEB大横评,结果这辆AEB中使用激光雷达的车型,排名垫底。
(2)激光雷达尚不够“收敛”的技术路线
华为前两年在推MDC系列计算单元时,对于愿意合作的厂商,那是出人出力帮助其从其他计算平台移植到MDC平台。但就是坐拥这样的产品性能、服务态度,很多潜在合作厂商还是有抱有很大的担忧,但这不是上汽的“灵魂被夺舍”担忧,而是后续平台延续性的担忧。
因为当时从国际形势来看,华为MDC内使用的部分芯片、技术专利随时随地都有可能受到大洋彼岸的制裁,而这些一旦发生,华为势必就需要在下一代产品中更换技术路线;或者华为从安全性考虑,也是要在下一代产品里逐步替换上一些自研的技术。这就意味着当前使用MDC的厂家,如果后续想升级到下一代产品,那么很有可能涉及到工作量不小的移植工作。而对于英伟达,虽然不情愿,但是不得不承认其平台的延续性非常好,从Xavier到Orin几乎可以无缝衔接,有点硬件上的“Pin to Pin”的感觉。
激光雷达也存在这样的问题,图8充分展示了激光雷达技术路线的多样性,图中仅是从概率论的角度画出所有可能,部分技术路线可能已经过时、或是根本不合理。
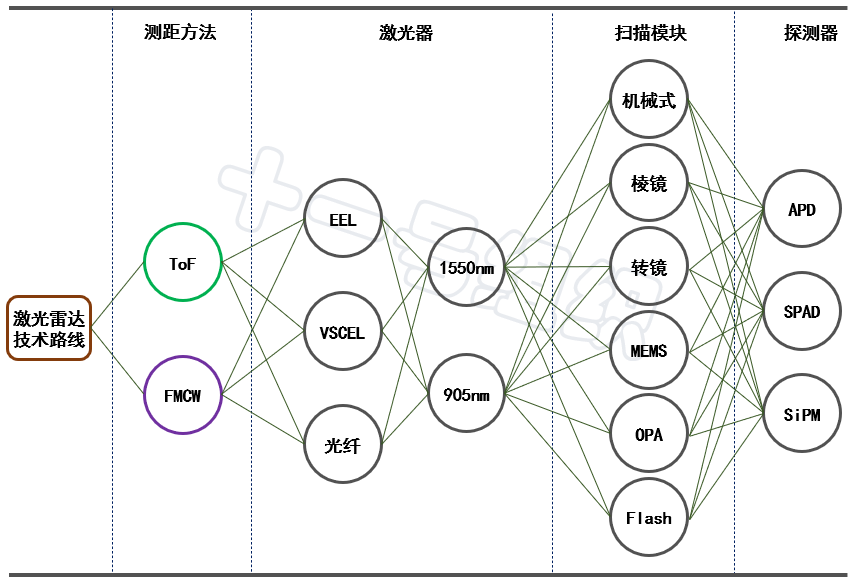
图8 激光雷达技术路线
所以如果各家在辅助驾驶中将激光雷达的感知比重提得比较高,那么当换一个激光雷达供应商或是使用供应商新一代产品时,可能就涉及到部分适配工作。而摄像头就不一样,技术路线稳定、产业链成熟、产品性能稳定,差别无非就是像素是几百万。
此外重要的一点是,激光雷达的寿命还是不尽如人意,如果辅助驾驶功能过多依赖激光雷达,那么可预见的在5年/10万公里内,至少需要更换一次激光雷达,这个钱是主机厂出还是消费者出,都是一笔不小的支出。但是如果作为可有可无的“花瓶”,那至少后期不用为更换而再花钱。
当然部分行业人士表示:过去激光雷达被这么看重也是有历史原因的,因为那时基于深度学习的视觉算法还不成熟,能支持深度学习的大算力平台也不成熟,不过这一现状现在已经改变,不仅是辅助驾驶领域,后续自动驾驶领域也将逐步降低对激光雷达的依赖。
(3)掩盖自身的“软实力”不足
智驾算法能力、工程化落地能力可能不是主机厂一朝一夕可以建立起来的,但是在整车车顶安装几个激光雷达,这是主机厂擅长的。 于是乎,带有激光雷达的车型如雨后春笋般冒了出来,数量上从一颗到四颗,安装位置上从大灯到车顶,而对于何时可以发挥激光雷达的作用,主机厂给出了出奇一致的答案:敬请期待。
这也是主机厂的无奈之举,虽然多数主机厂都知道天道酬勤、酬诚、酬谦、不酬卷,但竞争对手已经上了2个激光雷达,我不上4个,新车发布会还怎么开。 不过随着大家软实力的不断提升,这一现状也在改变,不少主机厂在其下一代或新车型中要么直接减少激光雷达的数量,要么直接取消激光雷达,这是行业理智的开始。
文末随笔:激光雷达的优点显而易见,但如何结合算法发挥出激光雷达的优势,我想除了主机厂以外,激光雷达厂商也可以主动参与,主动探索先进的融合感知算法,向行业不断证明:我不是个“花瓶”。
来源 | 十一号组织
参考资料
【1】500万内最好的家用SUV,不怕鬼探头,能过交叉轴?
https://mp.weixin.qq.com/s/Hf-SrJDoATuYObzJcONEBw