提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
目录
- 一、实验目的
- 二、实验方法
- 三、实验设计
- 1.实验器材
- 2.电路连接
- 3.软件设计
- (1)实验变量
- (2)功能模块
- a)电机接收信号计算
- b)电机速度计算
- 四、实验步骤
- 1.系统辨识
- 2.加权函数设计
- 3.合成控制器
- 4.控制器降阶
- 5. 检查闭环系统稳定性
- 6. S/T的Bode图
- 7. 转换为离散控制器
- 五、实验结果
- 1.阶跃响应
- 2.抗阶跃干扰
- 3.抗正弦干扰
一、实验目的
本实验采用H∞混合灵敏度算法设计直流电机速度控制器,并通过stm32f407单片机进行实物控制,具体满足以下要求:
1.通过开发板上按键实现正反转控制,通过螺旋电位器实现电机加减速控制
2.使电机具有足够的稳定裕度和良好的跟踪性能
3.能够抑制0.1Hz以下的低频干扰
二、实验方法
H∞控制是指设计一个控制器K使闭环系统稳定且干扰对系统期望输出影响最小,所以利用H∞范数(传递函数的H∞范数可以描述输入到输出的最大增益)作为目标函数对系统进行优化设计。

基于混合灵敏度 S /T(S 为灵敏度,T 为补灵敏度)的 H∞ 控制器设计方法折中考虑了系统摄动带来的系统稳定和系统性能问题,对于结构不确定的系统是行之有效的设计方法。为了借助计算机求解控制器,需要把混合灵敏度问题转化为标准的 H∞ 优化问题。


其中,其中w1是S的加权函数,w2是T的加权函数。对于H∞次优控制中,上式等价于

因此,S/T 加权函数w1和w2的选取成为影响控制器控制效果的重要因素。S与系统跟踪性能和抗干扰能力相关,因此需要在低频范围增大w1内使S的增益变小。T与系统的鲁棒性和抗噪声干扰能力相关,因此需要在带宽以外增大w2以降低T的幅值。
三、实验设计
本实验设计结构框图如下:

1.实验器材

硬件:
1.STM32F407ZGT6开发板
2.L298N电机驱动模块
3.直流空心杯电机(12V,2000线)
4.螺旋电位器
软件:
1.IDE:MDK-Keil 软件
2.MATLAB
3.串口助手
2.电路连接

(2)螺旋电位器通过单片机开发板3.3V电压供电,并与单片机PF7引脚相连,用于电机调速。
(3)H桥驱动电路通过单片机开发板3.3V电压供电,其中的IN1、IN2引脚与单片机PF3、PF5引脚相连,OUT1和OUT2引脚与直流电机IN1和IN2引脚相连,实现电机的正反转控制;H桥驱动电路使能端EN A引脚与单片机PB6引脚相连,接收单片机输出的PWM信号,实现电机的调速功能。
(4)直流电机编码器Encoder A、Encoder B引脚通过单片机开发板5V供电,并与单片机PA6、PA7引脚相连,以读取电机的速度反馈。
3.软件设计
(1)实验变量
实验主要定义以下变量:

其中,输入信号scmd决定电机最终的速度,actual_speed用于表示电机实际速度,output_cmd用于记录控制器输出信号,DIR用于记录电机方向。并进行以下初始化:

(2)功能模块
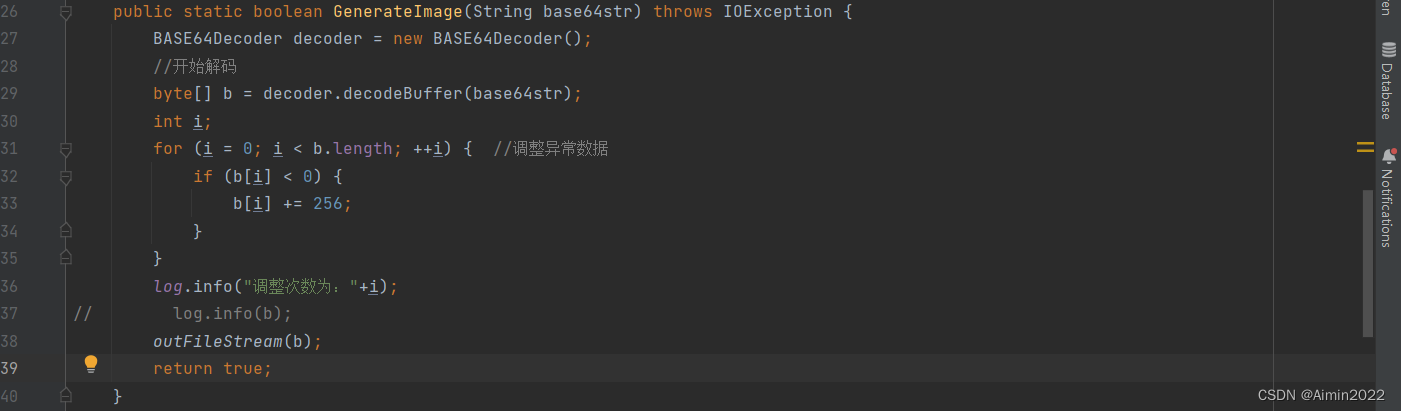
a)电机接收信号计算
电机接收的信号有PWM信号和方向信号,具体代码如下:

b)电机速度计算

实验中定时器周期为0.01s,每个周期需要计算电机每分钟转速,因此将PA6、PA7接收到的脉冲信号乘以6000,电机编码器为2000线,4倍频后为8000,所以再除以8000计算每分钟转速。
四、实验步骤
1.系统辨识
实验中通过向电机输入伪随机二进制序列(PRBS),并通过最小二乘法计算直流电机传递函数,共采取1200组输入、输出数据:


该系统的Bode图为
2.加权函数设计
根据实验目标,设计以下加权函数:

|w1|-1 和|w2|-1和的Bode图如下:

3.合成控制器
根据图2,采用H无穷混合灵敏度方式合成控制器,使用matlab计算出的控制器传递函数为

4.控制器降阶
在嵌入式应用程序中,资源是有限的。高阶意味着计算复杂度,采样周期更长。因此,需要降低控制器的阶数,而不显著失去它的属性,本实验采用平衡截断的方式(balanced truncation)将控制器降到4阶:

5. 检查闭环系统稳定性
计算闭环传递函数的极点,如果全在负半轴,则系统稳定

6. S/T的Bode图
将降阶后的控制器(4)带入整个闭环系统,画出S/T(灵敏度/灵敏补)的Bode图:

7. 转换为离散控制器
将控制器(4)转换为离散控制器,采样周期和控制器中断周期相等(T=0.01s):

五、实验结果
将上述控制器(5)通过stm32f407zgt6单片机实现以控制直流电机速度,结果如下。
1.阶跃响应
阶跃响应效果如下:

其中,红线为速度参考信号,黄线为实际电机速度。
2.抗阶跃干扰
为测试所设计的H∞控制器的抗干扰能力,应用该算法的直流电机启动后5秒后,加入1V阶跃干扰,实验效果如下:

3.抗正弦干扰
电机启动后在控制器后加入频率为0.1Hz、幅值为1V的正弦干扰,结果如下所示:

从上图可以看出,该H∞控制器基本可以抑制0.1Hz、1V的正弦干扰。