什么是can bus off?
CAN总线关闭(CAN bus off)是指CAN节点进入一种错误状态,无法继续正常的数据通信。当一个CAN节点的错误计数器超过了设定的阈值时,该节点将进入CAN总线关闭状态。在这种状态下,该节点将停止发送和接收数据,并且无法参与到总线通信中。
CAN总线关闭状态通常是由于节点发送错误次数过多导致的,这可能是由于硬件故障、电缆连接问题、电源电压异常或其他通信干扰引起的。一旦节点进入CAN总线关闭状态,它将无法正常工作,直到重新初始化或解决问题为止。
其他节点在CAN总线关闭状态下的节点仍然可以继续正常的数据通信,但是受到关闭节点的影响,可能会导致通信性能下降或数据传输延迟。因此,当出现CAN总线关闭情况时,需要及时识别和解决问题,以确保整个CAN总线的正常运行。
什么情况会出现bus off?
CAN总线关闭(bus off)状态通常出现在以下情况下:
- **错误计数器超过阈值:**每个CAN节点都有一个错误计数器,当节点在发送或接收数据时发生错误,计数器会递增。如果错误计数器超过了设定的阈值,节点将进入bus off状态。
- **通信故障:**CAN总线的通信可能会受到各种干扰和故障的影响,如电缆连接问题、电源电压异常、信号干扰等。这些故障可能导致节点无法正常发送或接收数据,最终导致bus off状态。
- **节点故障:**CAN节点自身的硬件或软件问题可能导致其无法正常工作。例如,节点的CAN控制器故障、节点程序错误等都可能导致bus off状态。
CAN总线的CANH和CANL 短接、CAN总线的CANH接GND和CAN总线的CANL接VCC、CAN总线的因为终端电阻的问题,导致RXD相对于TXD 的信号延迟较大导致。(以500K的CAN为例,通常情况RXD和TXD的延迟约在100ns左右,若由终端断电阻的配置不对会导致TXD和RXD延迟时间增大可能达到500ns。若是2M的CANFD 就会造成数据传送产生问题,最终导致BUSOFF )
当一个节点进入bus off状态时,它将停止发送和接收数据,并无法参与到总线通信中。其他节点仍然可以继续正常的数据通信,但受到bus off节点的影响,可能会导致通信性能下降或数据传输延迟。因此,当出现bus off情况时,需要及时识别和解决问题,以确保整个CAN总线的正常运行。
进入can bus off
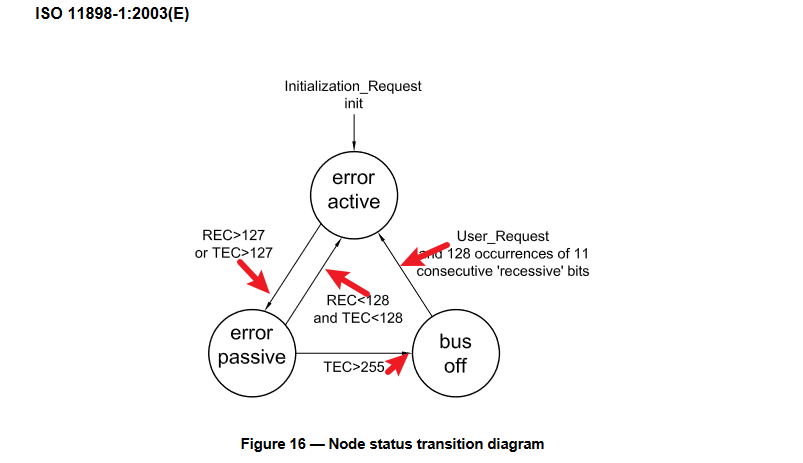
在故障限制方面,一个节点可能处于三种状态中的一种,这取决于错误计数器的级别 error active,error passive 和 bus off.
Error counting错误计数法
1、当接收机检测到错误时,接收错误计数器应增加1,除非在发送主动错误标志或过载标志时检测到的错误是位错误。
2、当接收端在发送错误标志后检测到一个主比特作为第一个比特时,接收错误计数器需要增加8个( 8 )。
3、当发送端发送错误标志时,发送错误计数器应增加8 ( 8 )个。
- 如果发送端是错误被动的并且由于没有检测到主导ACK而检测到ACK错误,并且在发送其被动错误标志时没有检测到主导比特。
- 如果发送方发送了一个错误标志,因为在仲裁过程中发生了一个错误,那么这个错误标志应该是隐性的,并且被发送为隐性的,但被监控为显性的。
在这两种情况下,发射误差计数器保持不变。 +8
4、 如果发送端在发送主动错误标志或过载标志的同时检测到比特错误,则发送错误计数器应增加8 ( 8 )。
5、如果接收机在发送主动错误标志或过载标志的同时检测到比特错误,则接收错误计数器应增加8 ( 8 )。
6、在发送主动错误标志、被动错误标志或过载标志后,任何节点最多可以容忍七( 7 )个连续的优势比特。在检测到第14 ( 14 )个连续的主导比特(在出现主动错误标志或过载标志的情况下)后或检测到第8个连续的主导比特后,在每增加8个连续的主导比特后,每个发送端将其发送错误计数器增加8 ( 8 )个,每个接收端将其接收计数器增加8 ( 8 )个。
7、当一帧(得到ACK ,直到EOF结束,没有检测到误差)成功传输后,除非传输错误计数器已经为零( 0 ),否则传输错误计数器将减少1 ( 1 )。 -1
8、成功接收一帧(接收到ACK时隙无误码且成功发送ACK比特)后,如果接收误差计数器在一( 1 )到一百二十七( 127 )之间,则应减小1。如果接收错误计数器为零( 0 ),则应保持为零( 0 ),如果大于一百二十七( 127 ),则应设置为一百一十九( 119 )到一百二十七( 127 )之间的值。
主动错误和被动错误状态之间的转换
如果节点的发送错误计数器或接收错误计数器超过127 ( 127 ) ( 7位接收误差计数器情况下的进位条件),则监控器应请求MAC子层将相应节点设置为错误被动状态。让节点成为错误被动的错误条件将导致节点发送一个主动错误标志。当发送错误计数器和接收错误计数器均小于或等于127 ( 127 ) 时,错误被动节点将重新变为错误主动节点。当节点的接收误差计数器超过一百二十七( 127 )的误差被动限时,该接收误差计数器的进一步增量将受到计数器宽度的限制。在下一次成功接收一帧(过渡到错误激活( error-active ))时,接收错误计数器应设置为低于错误被动l的值。
bus off manangement
如果一个节点的发送错误计数器大于二百五十五( 255 ) ( 8位传输错误计数器情况下的进位条件),那么主管应该请求PL将该节点设置为总线关闭状态。总线关闭状态不得对公交车产生任何影响。它既不发送任何帧,也不发送ACK、错误帧、过载帧。这样的节点是否接收来自总线的帧取决于实现方式。处于总线关闭状态的节点在监测到(见图16)总线上128 ( 128 )个连续11 ( 11 )个隐性位后,其错误计数器都设置为0 ( 0 ),可能成为错误活跃的(不再是总线关闭)。注:现有的实现方式可能不同。例如,6.14允许发射端和接收端的关断;恢复可能只在用户请求时开始。这在ISO 16845的一致性测试中没有涉及。
恢复bus off
要恢复CAN总线关闭状态(bus off),可以采取以下步骤:
- 检查和修复通信故障:首先需要排查并解决导致CAN总线关闭的问题,如检查电缆连接是否良好,确保电源电压正常,排除信号干扰等。
- 重新初始化CAN节点:将进入bus off状态的CAN节点进行重新初始化,包括重新设置CAN控制器、清除错误计数器等。
- 等待恢复时间:在重新初始化节点后,需要等待一段时间,通常为128个错误帧时间(TEC),以确保CAN节点已经完全恢复。 快慢恢复,所谓的快慢恢复,即进入CAN BUSOFF状态后,ECU重新初始化CAN模块,并等待t(tBusOffQuick 或 tBusOffSlow)后,重新使能总线报文的发送。一些主机厂对其系统供应商的设备提出了相应的Busoff后恢复时间需求。例如:当ECU 进入Busoff 模式后,首先,ECU 执行快恢复模式,连续n次(TBD值,不同厂商次数要求不一样)快速恢复后,ECU 进入慢恢复模式。
判断CAN总线关闭状态是否已经恢复,可以通过以下方式:
- 监测错误计数器:在重新初始化节点后,可以通过监测节点的错误计数器来判断是否还在持续增加。如果错误计数器停止增加或保持在一个较低的值,说明CAN总线关闭已经恢复。
- 数据通信测试:进行数据通信测试,发送一些数据帧并观察节点的发送和接收情况。如果节点能够正常发送和接收数据,说明CAN总线关闭已经恢复
参考文章:
https://blog.csdn.net/u014156403/article/details/103725924
ISO11898标准文档