目录
1 经典CAN/CANFD网络拓扑分解
2 CAN收发器“前后端的电平”
3 图解MCU芯片与CAN物理总线之间CAN报文收发过程
3.1 TX,RX和CAN H/L电平变化:ECU接收一个报文
3.2 TX,RX和CAN H/L电平变化:ECU发送一个报文
END
推荐阅读(单击下方文字即可跳转至对应博文):
Vector工具链
CAN Matrix DBC
CAN Matrix Arxml
CANFD/经典CAN/CANXL
1 经典CAN/CANFD网络拓扑分解
下图是一个多节点的CAN网络的拓扑图:多个ECU;双绞线(CAN H和CAN L,屏蔽层);两个120欧姆的终端电阻。
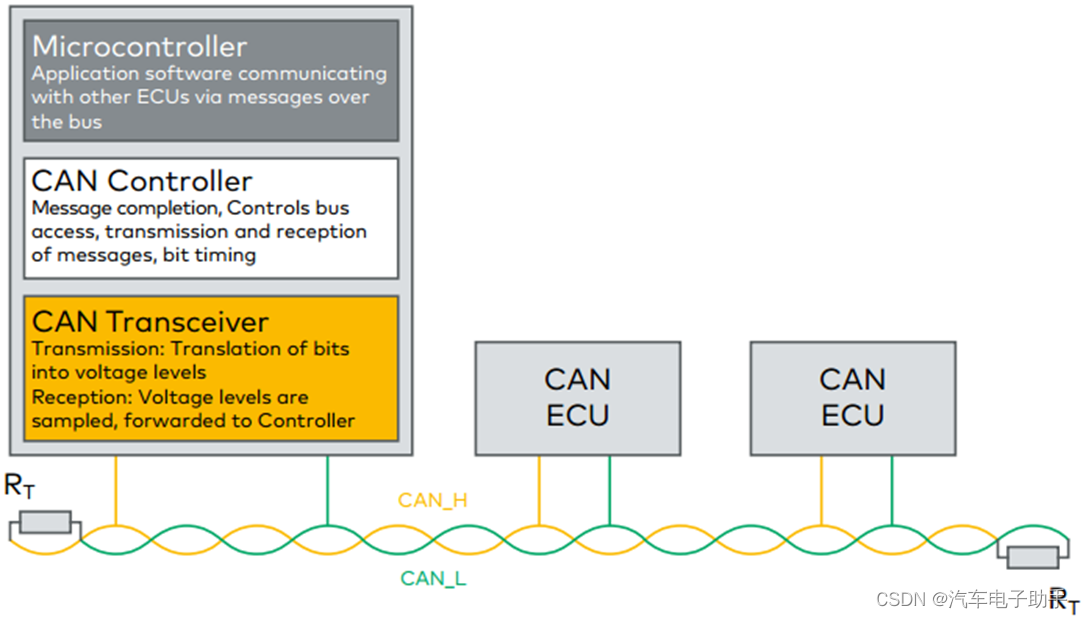
注意:一个CAN网络至少有2个CAN节点,才能完成CAN网络的通信。原因是:一个节点发送的帧,需要其它节点去ACK。通过这张图你可以看出,一个ECU中集成了CAN控制器和CAN收发器。
下图是对一个ECU进一步分解。一个ECU在多个CAN网络中充当节点Node:

框图的最外层可以理解为ECU的PCB;CAN控制器在MCU芯片内部;MCU芯片和CAN收发器集成在该PCB上(也有收发器集成在MCU内部的情况,本博文以CAN收发器外置为例展开)。
一个ECU中,一组CAN控制器和CAN收发器的组合,称之为对应CAN网路中节点Node;一个ECU中,可能在多个CAN网络中担当“节点” 的角色。
MCU芯片和CAN收发器之间除了通过TX和RX(单向通信)进行通信外,还有SPI(用于配置收发器的寄存器,以及一些状态的获取…),在上图中没有画出。汽车电子中,常用的收发器有TJA 1145和ATA 6570……
2 CAN收发器“前后端的电平”
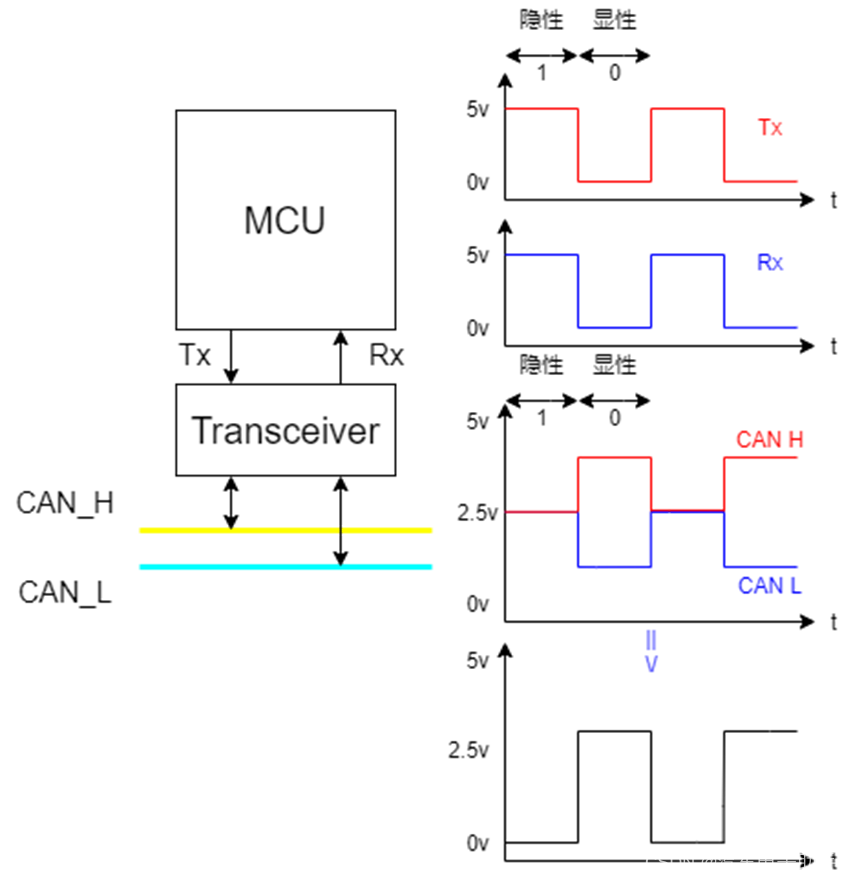
CAN收发器的作用是负责将数字电平与差分电平进行互转。

ECU发出的报文,通过MCU内部CAN控制器的TX发出报文的0和1数字电平序列,经过CAN收发器转成CAN H和CAN L的差分电平;
ECU发出报文的回采,以及ECU接收的报文,CAN收发器转换成0和1数字电平序列,通过RX发送给MCU内部的CAN控制器。
当CAN控制器与CAN收发器之间的TX从5V或者3.3V高电平变为0V低电平时,意味着CAN网络从隐性切换为显性,ECU可能在此时开始发送报文(例如CAN帧的第一个SOF位),或者ECU对接收帧置ACK。
当CAN控制器与CAN收发器之间的RX从5V或者3.3V高电平变为0V低电平时,意味着CAN网络从隐性切换为显性,CAN收发器可能在此时的回采ECU发出的CAN报文,或者接收其它ECU发出的帧。
注意:通常CAN收发器是5V供电,而MCU有5V供电,也有3.3V供电。对于3.3V供电的MCU,需要在MCU与CAN收发器之间,额外增加一个电平转换芯片,以匹配收发器的电平。
CAN H和CAN L的差分信号的显性和隐性,详见“【图解CAN总线】-2-详述CAN总线电平![]() https://blog.csdn.net/qfmzhu/article/details/122804817”。
https://blog.csdn.net/qfmzhu/article/details/122804817”。
3 图解MCU芯片与CAN物理总线之间CAN报文收发过程
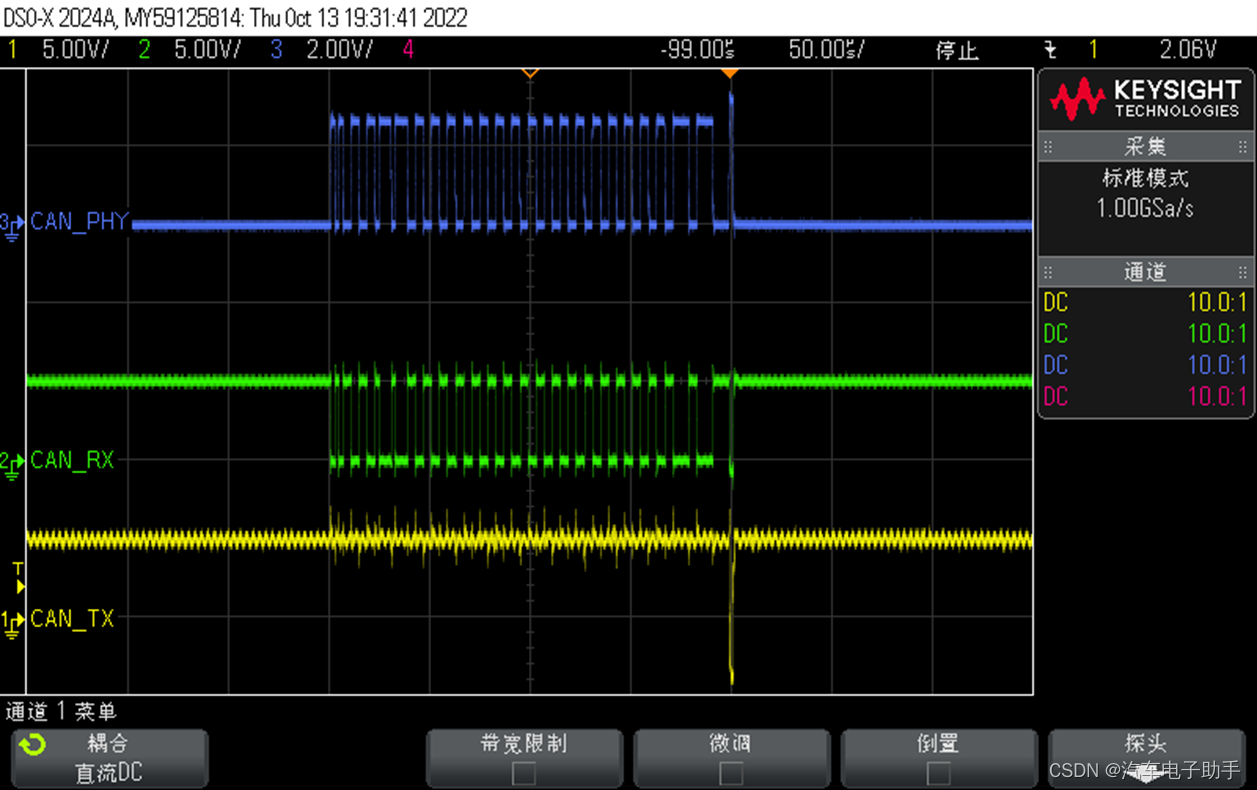
通过前面两个章节的学习,TX,RX和CAN H/L电平关系如下图。
3.1 TX,RX和CAN H/L电平变化:ECU接收一个报文

ECU接收到一个0x599报文。接收帧的差分信号通过CAN控制器与CAN收发器之间的RX转换为0和1数字电平序列,于此同时ECU的CAN控制器通过TX为该接收帧置ACK,并通过CAN收发器回采。
3.2 TX,RX和CAN H/L电平变化:ECU发送一个报文
ECU发送到一个0x211报文。ECU的CAN控制器通过TX发出CAN报文的0和1数字电平序列(ACK位是隐性),再经过CAN收发器转换为差分信号;接着CAN收发器回采该发送报文:于此同时其它ECU对该报文置ACK(ACK位是显性),该发送报文的差分信号再由CAN收发器回采,转换为数字电平,并通过RX给到MCU的CAN控制器。

推荐阅读(单击下方文字即可跳转至对应博文):
《Autosar从入门到精通-实战篇》总目录_培训教程持续更新中...
《Autosar_BSW高阶配置》总目录_培训教程持续更新中...
《Autosar_MCAL高阶配置》总目录_培训教程持续更新中...
END
获取更多“汽车电子资讯”和“工具链使用”,
请关注“汽车电子助手”,做您的好助cc