“阻塞与非阻塞 ”机制:
阻塞:
- 使用 休眠唤醒机制,read函数会休眠,是阻塞的
- 使用 poll 时,如果传入的超时时间不为 0,表示 read函数会休眠,这种访问方法也是阻塞的。
非阻塞
- 使用 poll 时,可以设置超时时间为 0,这样即使没有数据它也会立刻返回
如何让 read 函数既能工作于阻塞方式,也可以工作于非阻塞方式?
APP 调用 open 函数时,传入 O_NONBLOCK,就表示要使用非阻塞方式;默认是阻塞方式。
- 注意:对于普通文件、块设备文件,O_NONBLOCK 不起作用。
- 注意:对于字符设备文件,O_NONBLOCK 起作用的
前提是驱动程序针对O_NONBLOCK 做了处理。
int fd = open(“/dev/xxx”, O_RDWR | O_NONBLOCK); /* 非阻塞方式 */
int fd = open(“/dev/xxx”, O_RDWR ); /* 阻塞方式 */
在 open 之后,也可以通过 fcntl 函数修改为阻塞或非阻塞。
int flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags | O_NONBLOCK); /* 非阻塞方式 */
fcntl(fd, F_SETFL, flags & ~O_NONBLOCK); /* 阻塞方式 */
对于字符设备文件,O_NONBLOCK 起作用的前提是驱动程序针对O_NONBLOCK 做了处理
注意:在应用程序中设置标记位后,在驱动程序中可以知道该标记位,因为当 APP 打开某个驱动时,在内核中会有一个
struct file结构体对应这个驱动【该结构体是虚拟文件系统创建的】,这个结构体中有f_flags,保存所打开文件时的标记位;可以设置 f_flasgs 的 O_NONBLOCK 位,表示非阻塞;也可以清除这个位表示阻塞。
以 drv_read 为例:驱动程序要根据这个标记位决定事件未就绪时是休眠和还是立刻返回
static ssize_t drv_read(struct file *fp, char __user *buf, size_t count, loff_t *ppos)
{
//非阻塞,没有数据也立刻返回错误
if (queue_empty(&as->queue) && fp->f_flags & O_NONBLOCK)
return -EAGAIN;
//阻塞
wait_event_interruptible(apm_waitqueue, !queue_empty(&as->queue));
……
}
异步通知方式的按键驱动程序(stm32mp157)
button_test.c
实现功能:首先以非阻塞的方式读取环形缓冲区十次,然后以阻塞的方式读取按键的值
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
static int fd;
/*
* ./button_test /dev/my_gpio_key
*
*/
int main(int argc, char **argv)
{
int val;
struct pollfd fds[1];
int timeout_ms = 5000;
int ret;
int flags;
int i;
/* 1. 判断参数 */
if (argc != 2)
{
printf("Usage: %s <dev>\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR | O_NONBLOCK);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
//非阻塞的方式读取十次
for (i = 0; i < 10; i++)
{
if (read(fd, &val, 4) == 4)
printf("get button: 0x%x\n", val);
else
printf("get button: -1\n");
}
//修改为阻塞的方式,是休眠唤醒机制,没有数据则休眠
flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags & ~O_NONBLOCK);
while (1)
{
if (read(fd, &val, 4) == 4)
printf("get button: 0x%x\n", val);
else
printf("while get button: -1\n");
}
close(fd);
return 0;
}
gpio_key_drv.c
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
struct gpio_key{
int gpio;
struct gpio_desc *gpiod;
int flag;
int irq;
} ;
static struct gpio_key *gpio_keys_first;
/* 主设备号 */
static int major = 0;
static struct class *gpio_key_class;
/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;
struct fasync_struct *button_fasync;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
static int is_key_buf_empty(void)
{
return (r == w);
}
static int is_key_buf_full(void)
{
return (r == NEXT_POS(w));
}
static void put_key(int key)
{
if (!is_key_buf_full())
{
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static int get_key(void)
{
int key = 0;
if (!is_key_buf_empty())
{
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
int err;
int key;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_key_wait, !is_key_buf_empty());
key = get_key();
err = copy_to_user(buf, &key, 4);
return 4;
}
static unsigned int gpio_key_drv_poll(struct file *fp, poll_table * wait)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
poll_wait(fp, &gpio_key_wait, wait);
return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}
static int gpio_key_drv_fasync(int fd, struct file *file, int on)
{
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}
/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = gpio_key_drv_read,
.poll = gpio_key_drv_poll,
.fasync = gpio_key_drv_fasync,
};
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_key *gpio_key = dev_id;
int val;
int key;
val = gpiod_get_value(gpio_key->gpiod);
printk("key %d %d\n", gpio_key->gpio, val);
key = (gpio_key->gpio << 8) | val;
put_key(key);
wake_up_interruptible(&gpio_key_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
return IRQ_HANDLED;
}
/* 1. 从platform_device获得GPIO
* 2. gpio=>irq
* 3. request_irq
*/
static int gpio_key_probe(struct platform_device *pdev)
{
int err;
struct device_node *node = pdev->dev.of_node;
int count;
int i;
enum of_gpio_flags flag;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
count = of_gpio_count(node);
if (!count)
{
printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_first= kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);
for (i = 0; i < count; i++)
{
gpio_keys_first[i].gpio = of_get_gpio_flags(node, i, &flag);
if (gpio_keys_first[i].gpio < 0)
{
printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);
return -1;
}
gpio_keys_first[i].gpiod = gpio_to_desc(gpio_keys_first[i].gpio);
gpio_keys_first[i].flag = flag & OF_GPIO_ACTIVE_LOW;
gpio_keys_first[i].irq = gpio_to_irq(gpio_keys_first[i].gpio);
}
for (i = 0; i < count; i++)
{
err = request_irq(gpio_keys_first[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "my_gpio_key", &gpio_keys_first[i]);
}
/* 注册file_operations */
major = register_chrdev(0, "my_gpio_key", &gpio_key_drv); /* /dev/gpio_key */
gpio_key_class = class_create(THIS_MODULE, "my_gpio_key_class");
if (IS_ERR(gpio_key_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "my_gpio_key");
return PTR_ERR(gpio_key_class);
}
device_create(gpio_key_class, NULL, MKDEV(major, 0), NULL, "my_gpio_key"); /* /dev/my_gpio_key */
return 0;
}
static int gpio_key_remove(struct platform_device *pdev)
{
//int err;
struct device_node *node = pdev->dev.of_node;
int count;
int i;
device_destroy(gpio_key_class, MKDEV(major, 0));
class_destroy(gpio_key_class);
unregister_chrdev(major, "my_gpio_key");
count = of_gpio_count(node);
for (i = 0; i < count; i++)
{
free_irq(gpio_keys_first[i].irq, &gpio_keys_first[i]);
}
kfree(gpio_keys_first);
return 0;
}
static const struct of_device_id my_keys[] = {
{ .compatible = "first_key,gpio_key" },
{ },
};
/* 1. 定义platform_driver */
static struct platform_driver gpio_keys_driver = {
.probe = gpio_key_probe,
.remove = gpio_key_remove,
.driver = {
.name = "my_gpio_key",
.of_match_table = my_keys,
},
};
/* 2. 在入口函数注册platform_driver */
static int __init gpio_key_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = platform_driver_register(&gpio_keys_driver);
return err;
}
/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
* 卸载platform_driver
*/
static void __exit gpio_key_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
platform_driver_unregister(&gpio_keys_driver);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(gpio_key_init);
module_exit(gpio_key_exit);
MODULE_LICENSE("GPL");
Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册
KERN_DIR = /home/book/100ask_stm32mp157_pro-sdk/Linux-5.4
all:
make -C $(KERN_DIR) M=`pwd` modules
$(CROSS_COMPILE)gcc -o button_test button_test.c
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order button_test
# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.o
obj-m += gpio_key_drv.o
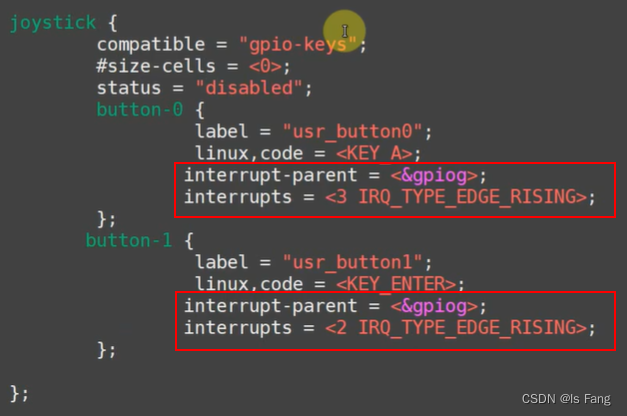
修改设备树文件

对于一个引脚要用作中断时,
- a) 要通过 PinCtrl 把它设置为 GPIO 功能;【ST 公司对于 STM32MP157 系列芯片,GPIO 为默认模式 不需要再进行配置Pinctrl 信息】
- b) 表明自身:是哪一个 GPIO 模块里的哪一个引脚【修改设备树】
打开内核的设备树文件:arch/arm/boot/dts/stm32mp157c-100ask-512d-lcd-v1.dts
gpio_keys_first {
compatible = "first_key,gpio_key";
gpios = <&gpiog 3 GPIO_ACTIVE_LOW
&gpiog 2 GPIO_ACTIVE_LOW>;
};
与此同时,需要把用到引脚的节点禁用
注意,如果其他设备树文件也用到该节点,需要设置属性为disabled状态,在arch/arm/boot/dts目录下执行如下指令查找哪些设备树用到该节点
grep "&gpiog" * -nr
如果用到该节点,需要添加属性去屏蔽:
status = "disabled";
编译测试
首先要设置 ARCH、CROSS_COMPILE、PATH 这三个环境变量后,进入 ubuntu 上板子内核源码的目录,在Linux内核源码根目录下,执行如下命令即可编译 dtb 文件:
make dtbs V=1
编译好的文件在路径由DTC指定,移植设备树到开发板的共享文件夹中,先保存源文件,然后覆盖源文件,重启后会挂载新的设备树,进入该目录查看是否有新添加的设备节点
cd /sys/firmware/devicetree/base
编译驱动程序,在Makefile文件目录下执行make指令,此时,目录下有编译好的内核模块gpio_key_drv.ko和可执行文件button_test文件移植到开发板上
确定一下烧录系统:cat /proc/mounts,查看boot分区挂载的位置,将其重新挂载在boot分区:mount /dev/mmcblk2p2 /boot,然后将共享文件夹里面的设备树文件拷贝到boot目录下,这样的话设备树文件就在boot目录下
cp /mnt/stm32mp157c-100ask-512d-lcd-v1.dtb /boot
重启后挂载,运行
insmod -f gpio_key_drv.ko // 强制安装驱动程序
ls /dev/my_gpio_key
./button_test /dev/my_gpio_key & //后台运行,此时prink函数打印的内容看不到
然后按下按键