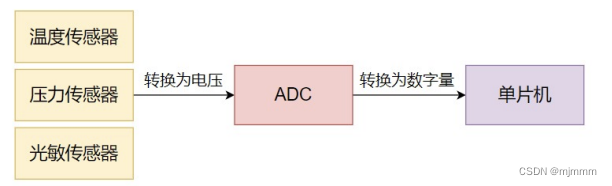
ADC介绍
Q: ADC是什么?
A: 全称:Analog-to-Digital Converter,指模拟/数字转换器
ADC的性能指标
- 量程:能测量的电压范围
- 分辨率:ADC能辨别的最小模拟量,通常以输出二进制数的位数表示,比如:8、10、12、 16位等;位数越多,分辨率越高,一般来说分辨率越高,转化时间越长
- 转化时间:从转换开始到获得稳定的数字量输出所需要的时间称为转换时间
ADC特性
- 12位精度下转换速度可高达1MHZ
- 供电电压:V SSA :0V,V DDA :2.4V~3.6V
- ADC输入范围:VREF- ≤ VIN ≤ VREF+
一般VREF-接 VSSA; VREF+接VDDA; 而VSSA一般接地,VDDA一般接3.3V;
所以量程是0 ~3.3v

- 采样时间可配置,采样时间越长, 转换结果相对越准确, 但是转换速度就越慢
- ADC 的结果可以左对齐或右对齐方式存储在 16 位数据寄存器中
16位寄存器里存放12位的精度的数据,就会涉及到左对齐和右对齐的问题(默认右对齐)
ADC通道
总共2个ADC(ADC1,ADC2),每个ADC有18个转换通道: 16个外部通道(也就是和GPIO口连在一起的)、 2个内部通道(温度 传感器、内部参考电压)。

外部的16个通道在转换时又分为规则通道和注入通道,其中规则通道最多有16路,注入通道最多 有4路。
可以这样理解:
规则组:正常排队的人;
注入组:有特权的人(军人、孕妇)
ADC转换顺序
每个ADC只有一个数据寄存器,16个通道一起共用这个寄存器,所以需要指定规则转换通道的转 换顺序。
规则通道中的转换顺序由三个寄存器控制:SQR1、SQR2、SQR3,它们都是32位寄存器。SQR寄存器控制着转换通道的数目和转换顺序,只要在对应的寄存器位SQx中写入相应的通道,这个通 道就是第x个转换。

和规则通道转换顺序的控制一样,注入通道的转换也是通过注入寄存器来控制,只不过只有一个 JSQR寄存器来控制,控制关系如下:

注入序列的转换顺序是从JSQx[ 4 : 0 ](x=4-JL[1:0])开始。只有当JL=4的时候,注入通道的转换 顺序才会按照JSQ1、JSQ2、JSQ3、JSQ4的顺序执行。
ADC触发方式
1. 通过向控制寄存器ADC-CR2的ADON位写1来开启转换,写0停止转换。
2. 也可以通过外部事件(如定时器)进行转换。
ADC转化时间
ADC是挂载在APB2总线(PCLK2)上的,经过分频器得到ADC时钟(ADCCLK),最高 14 MHz。
转换时间 = 采样时间+12.5个周期
12.5个周期是固定的,一般我们设置 PCLK2=72M,经过 ADC 预分频器能分频到最大的时钟只能 是 12M,采样周期(采样时间)设置为 1.5 个周期,则一共是14倍周期,为14 *(1/12000000)秒; 算出最短的转换时间为 1.17us。
ADC转化模式
扫描模式
关闭扫描模式:只转换ADC_SQRx或ADC_JSQR选中的第一个通道
打开扫描模式:扫描所有被ADC_SQRx或ADC_JSQR选中的所有通道
单次转换/连续转换
单次转换:只转换一次
连续转换:转换一次之后,立马进行下一次转换
使用ADC读取烟雾传感器的值 的实验
硬件介绍
烟雾传感器:


如图所示,烟雾传感器的AO和DO分别代表模拟信号和数字信号,由于现在学习的ADC(模数转换),所以将AO引脚接入单片机,而不使用DO引脚。
那么AO应该接在哪里呢?
查看产品手册:
可见在STM32中,两路ADC的同一通道使用的同一个引脚
在这个实验中,将AO接入单片机的PA0,对应ADC1或2的通道0

CubeMX
1. 惯例设置 + 开一路串口
注意这里的时钟配置“Clock Configuration”,上面提到过,ADC是挂载在PCLK2上的,并经过分配得到ADC自己的时钟频率的。
问题在于,如果像之前那样设置HCLK为72MHz, 那么在尝试打开ADC的时候,会报错:
原因就是 ADC的最高频率是14MHz,然而根据惯例设置,分配到ADC处的频率变成了36MHz了。
解决办法就是:
先将弹出来的会话框点击NO(因为这是会自动帮忙配置的请求,这里只需要自己调整一下就可以),然后将ADC的分频系数改为“/6” 或 “/8”,这样就不会报错了:

2. 点击左侧的ADC,选择通道0:

2.1 此时,可以看到右侧的图中PA0被选中,再次证明PA0的确是ADC1的通道0:

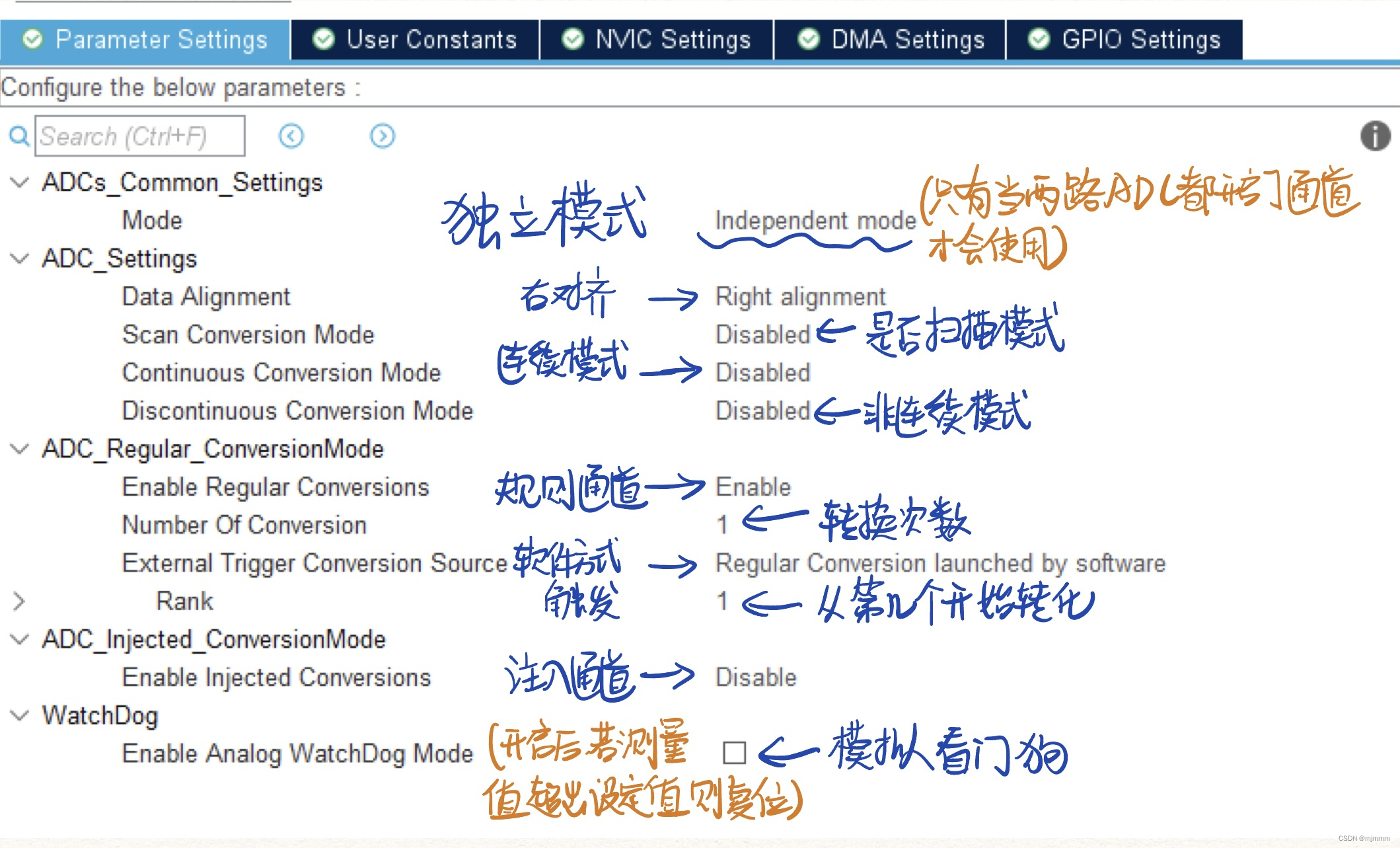
2.2 在下方的参数设置,可以看到上面提到的关于ADC各种的设置,此处暂不修改
3. 惯例配置生成代码:

Keil
1. 因为要通过串口来打印数据,所以要重写printf,所以要打开miro-lib:

2. 代码:
#include "stdio.h"
int fputc(int a, FILE *f) //一个字符一个字符发送
{
unsigned char temp[1] = {a};
HAL_UART_Transmit(&huart1, temp, 1, 0xffff);
return a;
}
int main(void)
{
uint32_t smoke_value; //通过跳转可以知道 HAL_ADC_GetValue() 的返回值是“uint32_t”类型
while (1)
{
HAL_ADC_Start(&hadc1); //启动ADC单次转换
HAL_ADC_PollForConversion(&hadc1, 50); //等待ADC转换完成,50是time out
smoke_value = HAL_ADC_GetValue(&hadc1); //读取ADC转换数据,通过跳转可以知道返回值是“uint32_t”类型
printf("smoke_value = %f\r\n", 3.3/4096 * smoke_value);
//printf("smoke_value = %d \r\n", smoke_value);
HAL_Delay(500); //每500ms检测一次
}
}从HAL_ADC_GetValue(&hadc1)中读取到的是一个12位有效二进制数的值,而电压是3.3V,所以一个刻度的值就是 3.3/2^12 = 3.3/4096,把这个最小刻度值乘以读取到的值,就是有效的数据了。
而读出来的数其实就是电压的值,至于电压的值究竟对应多少烟雾含量,这个要看烟雾报警器的手册等。
实现效果
串口助手中:

可见,每隔500ms,就会通过串口打印通过ADC转换得到的有效电压值!









![[STM32教程]01如何开始准备hal库的开发环境](https://img-blog.csdnimg.cn/17de37dbbf9d4d5590924e4e00f27ea0.png)