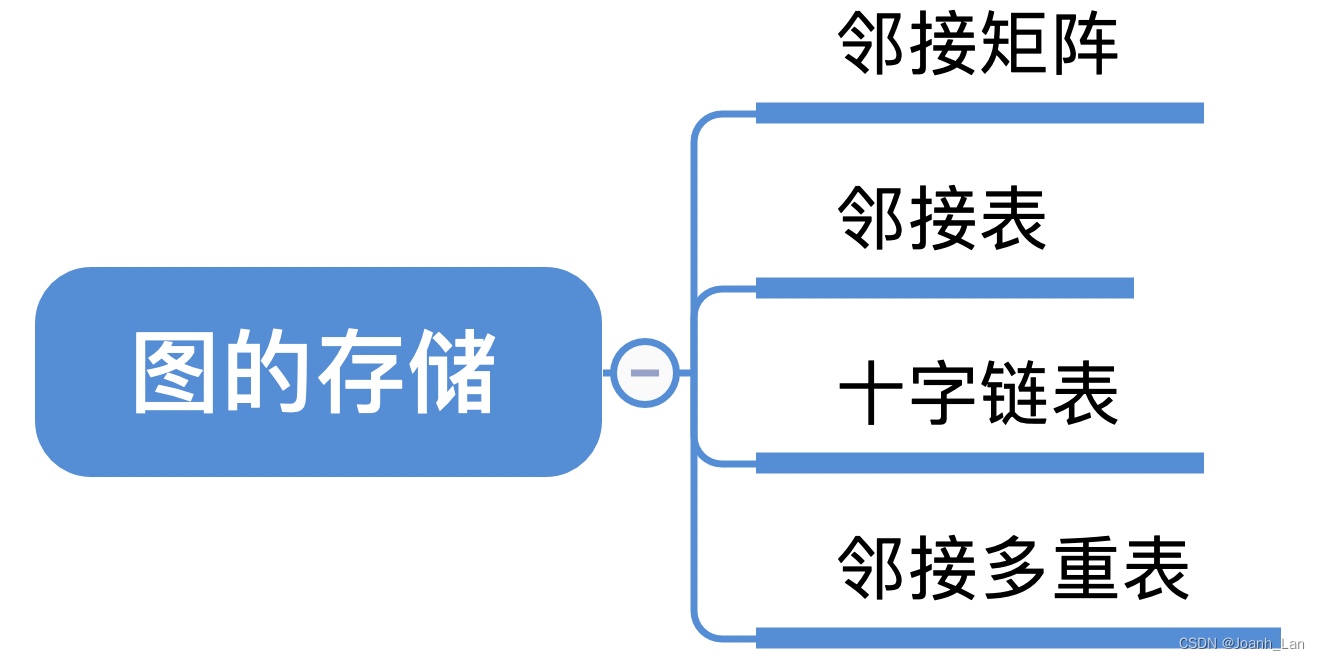
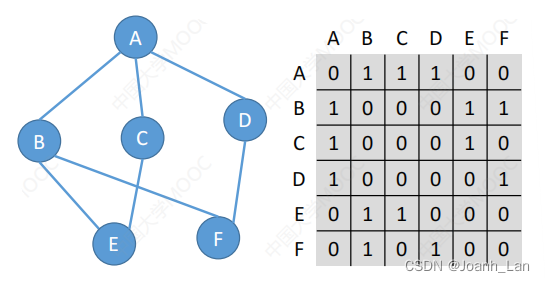
数据结构–图的存储邻接矩阵法
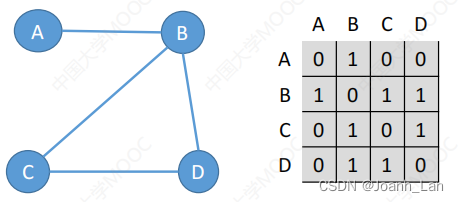
无向图:
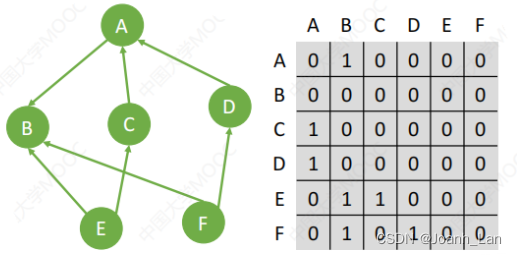
有向图:
#define MaxVerTexNum 100 //顶点数目的最大值
typedef struct
{
char vex[MaxVerTexNum]; //顶点表
int Edge[MaxVerTexNum][MaxVerTexNum]; //邻接矩阵,边表
int vexnum, arcnum; //图的当前顶点数和边数/弧数
} MGraph;

无向图:
第i个结点的
度
\color{red}度
度 =
第
i
行(或第
i
列)
\color{red}第i行(或第i列)
第i行(或第i列)有向图的非零元素个数
有向图:
第i个结点的
出度
\color{red}出度
出度 =
第
i
行
\color{red}第i行
第i行的非零元素个数
第i个结点的
入度
\color{red}入度
入度 =
第
i
列
\color{red}第i列
第i列的非零元素个数
第i个结点的
度
\color{red}度
度 =
第
i
行、第
i
列
\color{red}第i行、第i列
第i行、第i列的非零元素个数之和
邻接矩阵法求顶点的度 / 出度 / 入度的时间复杂度为 O ( ∣ V ∣ ) \color{purple}邻接矩阵法求顶点的度/出度/入度的时间复杂度为 O(|V|) 邻接矩阵法求顶点的度/出度/入度的时间复杂度为O(∣V∣)
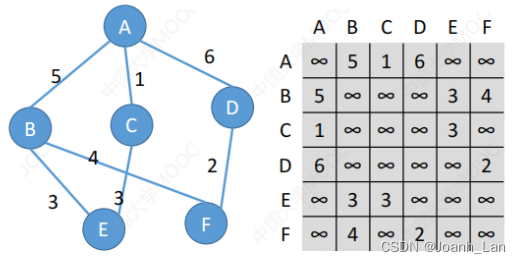
邻接矩阵法存储带权图(网)
无向网:
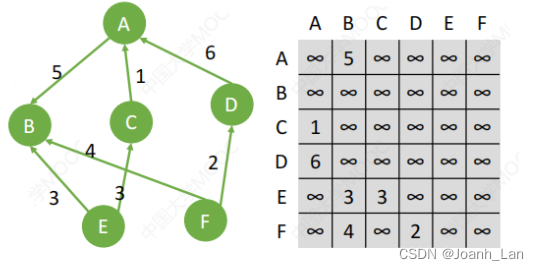
有向网:
#define MaxVerTexNum 100 //顶点数目的最大值
#define INF 0x3f3f3f3f
typedef char VertexType; //顶点的数据类型
typedef int EdgeType; //带权图中边上权值的数据类型
typedef struct
{
VertexType Vex[MaxVerTexNum]; //顶点
EdgeType Edge[MaxVerTexNum][MaxVerTexNum]; //边的权
int vexnum, arcnum; //图的当前顶点数和弧数
} MGraph;
邻接矩阵法的性能分析\
空间复杂度:
O
(
∣
V
∣
2
)
O(|V|^2)
O(∣V∣2) ——只和顶点数相关,和实际的边数无关
适合用于存储稠密图
无向图的邻接矩阵是对称矩阵,可以压缩存储(只存储上三角区/下三角区)
邻接矩阵法的性质
设图G的邻接矩阵为A(矩阵元素为0/1),则 A n A^n An的元素 A n [ i ] [ j ] A^n[i][j] An[i][j]等于由顶点 i 到顶点 j 的长度为 n 的路径的数目

知识回顾与重要考点
邻接矩阵法要点回顾:
• 如何计算指定顶点的度、入度、出度(分无向图、有向图来考虑)?时间复杂度如何?
• 如何找到与顶点相邻的边(入边、出边)?时间复杂度如何?
• 如何存储带权图?
• 空间复杂度——
O
(
∣
V
∣
2
)
O(|V|^2)
O(∣V∣2),适合存储稠密图
• 无向图的邻接矩阵为对称矩阵,如何压缩存储?
• 设图G的邻接矩阵为A(矩阵元素为0/1),则An的元素An[i][j]等于由顶点i到顶点j的长度为n的路径的数目






![[STM32教程]01如何开始准备hal库的开发环境](https://img-blog.csdnimg.cn/17de37dbbf9d4d5590924e4e00f27ea0.png)