运动规划概述
- 前端路径搜索
- 后端轨迹生成
- MPD & MPC
- 地图表示
- 多智能体路径规划MAPF
前端路径搜索
不希望花费太多的算力和代价,因此通常把高维问题降成低维问题,先找到一条粗劣可行的低维解。
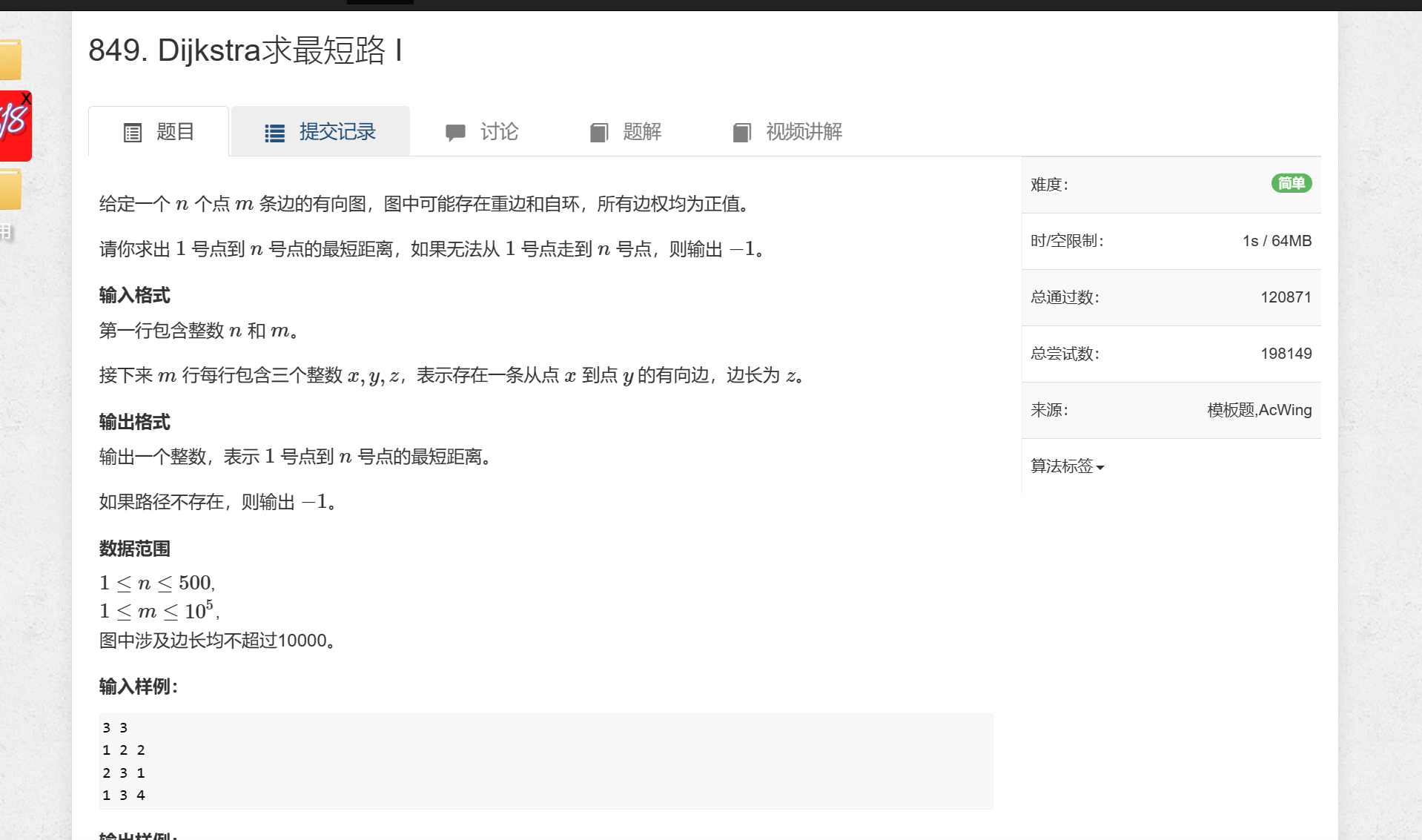
- 基于搜索的路径规划 图搜索问题 Dijkstra and A* 、 Jump Point Search跳点算法
- 基于随机采样的路径规划 PRM RRT RRT* ,RRT本身不具备渐近最优性
- 适应动力学要求的路径规划 考虑移动机器人简单的动力学模型,State Lattice Search 代价高,Hybrid A* 一个网格维护一个状态,当发现一个更好的状态将取代原来的状态。Kinodynamic RRT*
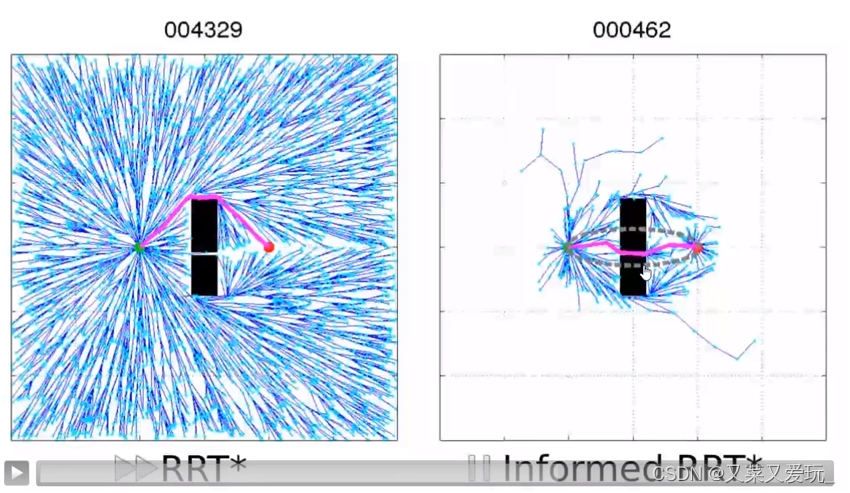
RRT在包含窄缝的环境下很难找到最优路径,informed RRT 添加一个椭圆采样范围快速找到最优路径。
后端轨迹生成
利用路径搜索产生的低维解,通过一些优化方法,生成一个精确、可行的轨迹,要求高阶连续、光滑、安全等。
- minimum snap轨迹 微分平坦性质,优化表达形式,closed-form闭式解,已知环境信息。
- 软优化(约束)、硬优化(约束),软约束一般用于局部的轨迹规划
MPD & MPC
马尔可夫决策过程、模型预测控制
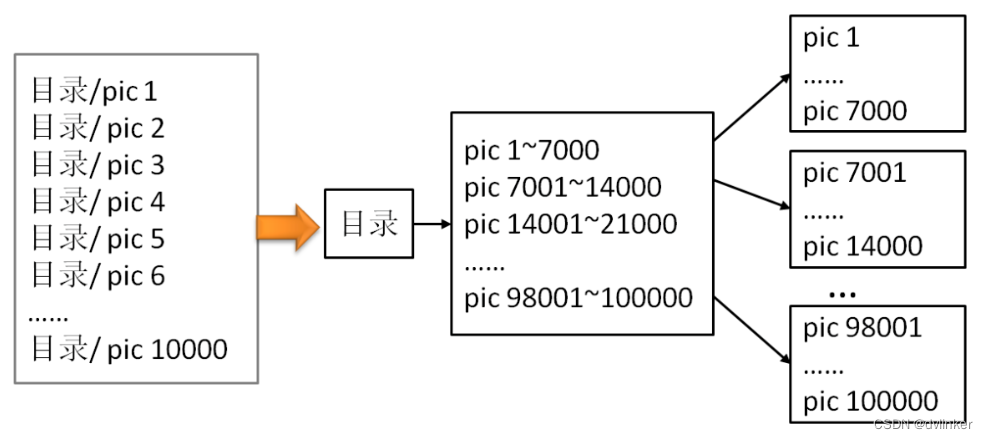
地图表示
- 存储地图信息的数据结构 Occupancy grid map,环境密集切分,结构化特征,直接的坐标索引查询。八叉树Octo-map 稀疏结构化。Voxel hashing 哈希表的存储形式。Point cloud map点云地图。TSDF map 截断符号距离场,障碍物外的值表示到障碍物的距离且为+,障碍物内部的值为 - 。ESDF map 欧式符号距离场,FIESTA.
- 地图信息融合