本节演示添加线要素,使用第四节单击事件的例子,修改点击事件创建线要素。
1、重新修改地图默认位置
double r = glm::radians(-45.0); Cesium::HeadingPitchRoll *orientation = new Cesium::HeadingPitchRoll(0.0, r, 0.0); glm::dvec3 initialPosition1 = Cesium::Cartesian3::fromDegrees(113.0041, 22.9950, 1000); viewer._scene->_camera->setView(orientation, initialPosition1);
2、修改Handler的点击函数mouseUp,创建PolylineCollection和线要素
static void mouseUp(void *handler, Cesium::ScreenEvent *event) {
Handler *aggregator = (Handler *) handler;
if (aggregator->polylines==NULL) {
aggregator->polylines = new Cesium::PolylineCollection();
aggregator->viewer->_scene->primitives()->add(aggregator->polylines);
glm::dvec3 initialPosition1 = Cesium::Cartesian3::fromDegrees(113.00, 23.00);
glm::dvec3 initialPosition2 = Cesium::Cartesian3::fromDegrees(113.01, 23.00);
glm::dvec3 initialPosition3 = Cesium::Cartesian3::fromDegrees(113.01, 23.01);
glm::dvec3 initialPosition4 = Cesium::Cartesian3::fromDegrees(113.00, 23.01);
std::vector<glm::dvec3> position{initialPosition1, initialPosition2, initialPosition3, initialPosition4,
initialPosition1};
aggregator->polyline = aggregator->polylines->add(position);
aggregator->polyline->width(5);
}
}
2、运行点击地图即可看到线要素
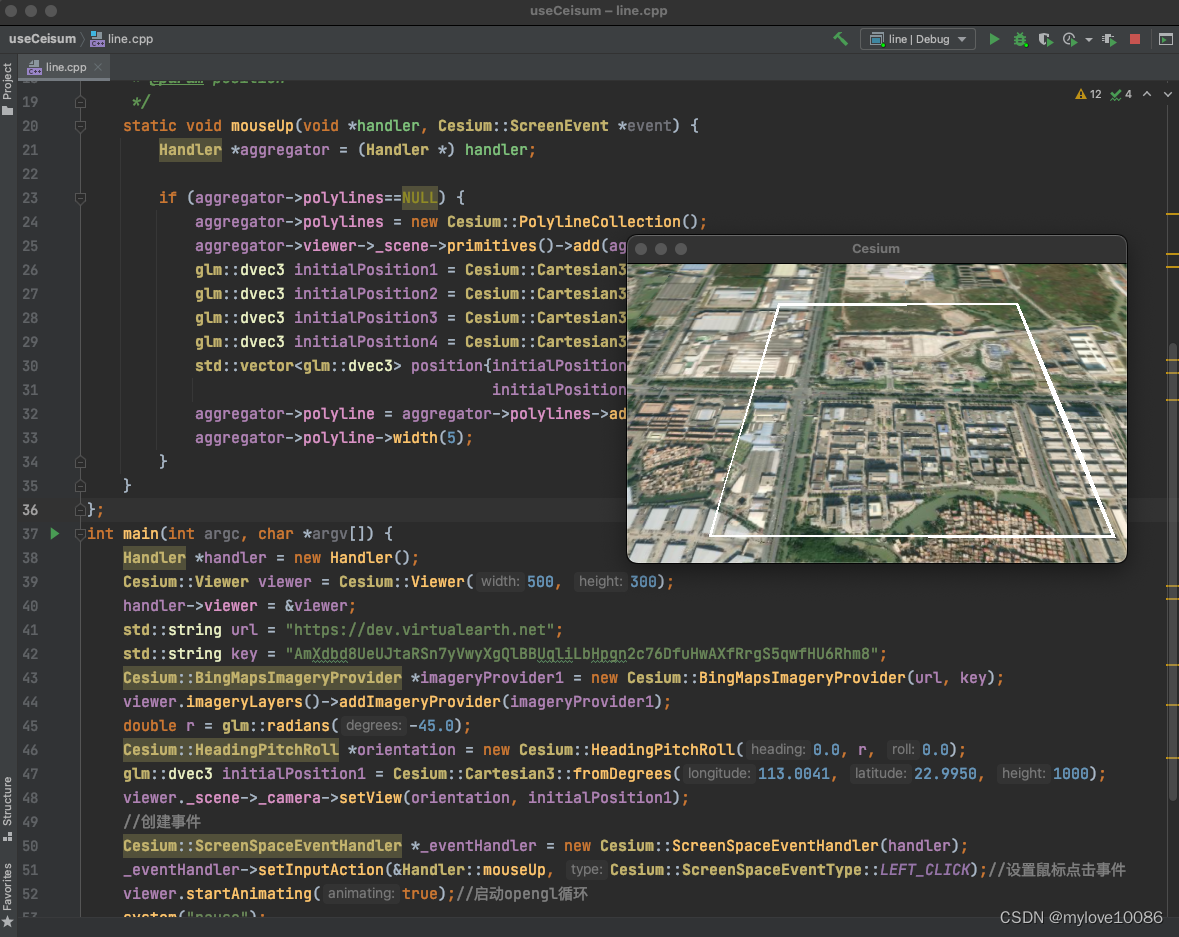
完整代码
/**
* Created by IBM on 2021/3/3.
*/
#include <iostream>
#include <Widgets/Viewer/Viewer.h>
#include <Scene/PolylineCollection.h>
#include <Scene/Polyline.h>
class Handler {
public:
Cesium::Viewer *viewer;
Cesium::PolylineCollection *polylines = NULL;
Cesium::Polyline *polyline = NULL;
/**
* 鼠标抬起事件
* @param type
* @param position
*/
static void mouseUp(void *handler, Cesium::ScreenEvent *event) {
Handler *aggregator = (Handler *) handler;
if (aggregator->polylines==NULL) {
aggregator->polylines = new Cesium::PolylineCollection();
aggregator->viewer->_scene->primitives()->add(aggregator->polylines);
glm::dvec3 initialPosition1 = Cesium::Cartesian3::fromDegrees(113.00, 23.00);
glm::dvec3 initialPosition2 = Cesium::Cartesian3::fromDegrees(113.01, 23.00);
glm::dvec3 initialPosition3 = Cesium::Cartesian3::fromDegrees(113.01, 23.01);
glm::dvec3 initialPosition4 = Cesium::Cartesian3::fromDegrees(113.00, 23.01);
std::vector<glm::dvec3> position{initialPosition1, initialPosition2, initialPosition3, initialPosition4,
initialPosition1};
aggregator->polyline = aggregator->polylines->add(position);
aggregator->polyline->width(5);
}
}
};
int main(int argc, char *argv[]) {
Handler *handler = new Handler();
Cesium::Viewer viewer = Cesium::Viewer(500, 300);
handler->viewer = &viewer;
std::string url = "https://dev.virtualearth.net";
std::string key = "AmXdbd8UeUJtaRSn7yVwyXgQlBBUqliLbHpgn2c76DfuHwAXfRrgS5qwfHU6Rhm8";
Cesium::BingMapsImageryProvider *imageryProvider1 = new Cesium::BingMapsImageryProvider(url, key);
viewer.imageryLayers()->addImageryProvider(imageryProvider1);
double r = glm::radians(-45.0);
Cesium::HeadingPitchRoll *orientation = new Cesium::HeadingPitchRoll(0.0, r, 0.0);
glm::dvec3 initialPosition1 = Cesium::Cartesian3::fromDegrees(113.0041, 22.9950, 1000);
viewer._scene->_camera->setView(orientation, initialPosition1);
//创建事件
Cesium::ScreenSpaceEventHandler *_eventHandler = new Cesium::ScreenSpaceEventHandler(handler);
_eventHandler->setInputAction(&Handler::mouseUp, Cesium::ScreenSpaceEventType::LEFT_CLICK);//设置鼠标点击事件
viewer.startAnimating(true);//启动opengl循环
system("pause");
return 0;
}
返回目录