举例
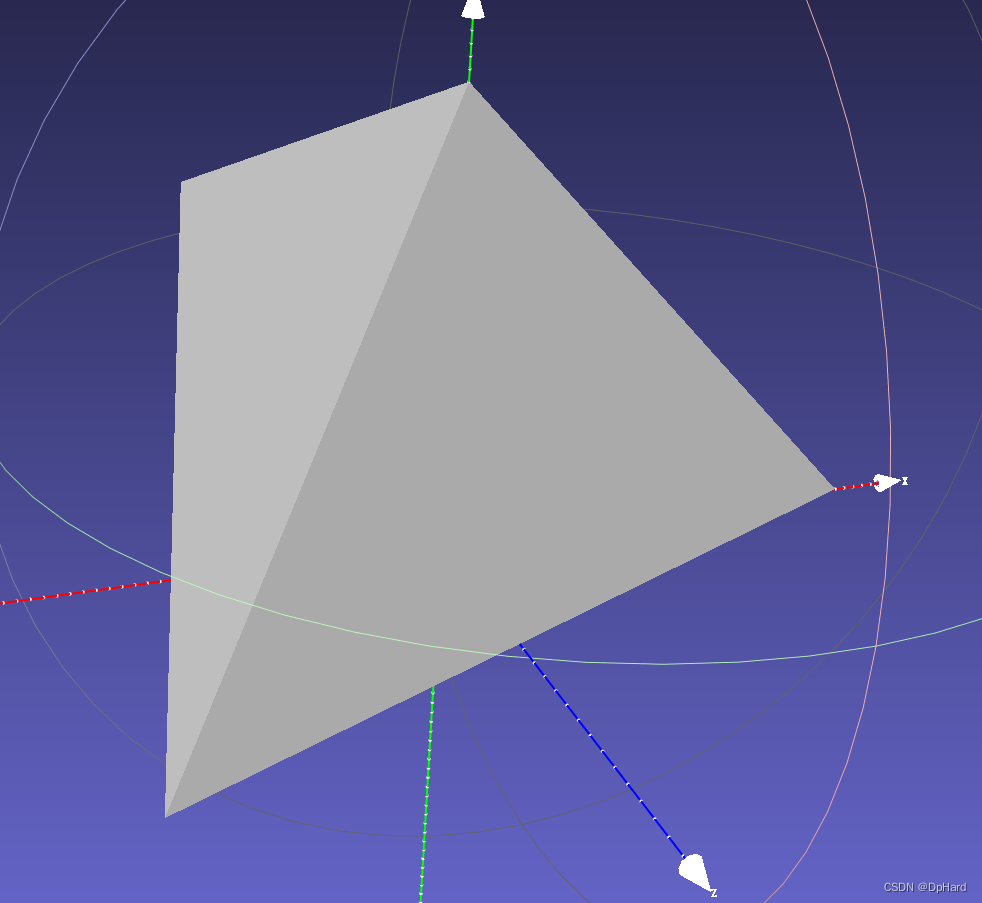
它以txt打开后如下所示
v -0.3 0 0.3
v 0.4 0 0
v -0.2 0.3 -0.1
v 0 0.4 0
# 4 vertices
g head
s 1
f 1/1/1 2/1/1 4/1/1
f 1/1/1 2/1/1 3/1/1
f 2/1/1 4/1/1 3/1/1
f 1/1/1 4/1/1 3/1/1
一般而言obj文件以txt格式打开后包含如下片段
v -0.3 0 0.3
vt 0.625 0.458 0.000
vn -0.382 -0.591 0.710
f 1/1/1 2/1/1 4/1/1
其中
v :几何体顶点(Geometric vertices)
vt :贴图坐标点(Texture vertices) 映射到一个二维的图上
vn :顶点法线(Vertex normal)
f : 面 (Face) 记录了一个三角面片的三个顶点,每个顶点以v/vt/vn的形式储存。
注意: 在obj文件中,所有的索引均从1开始
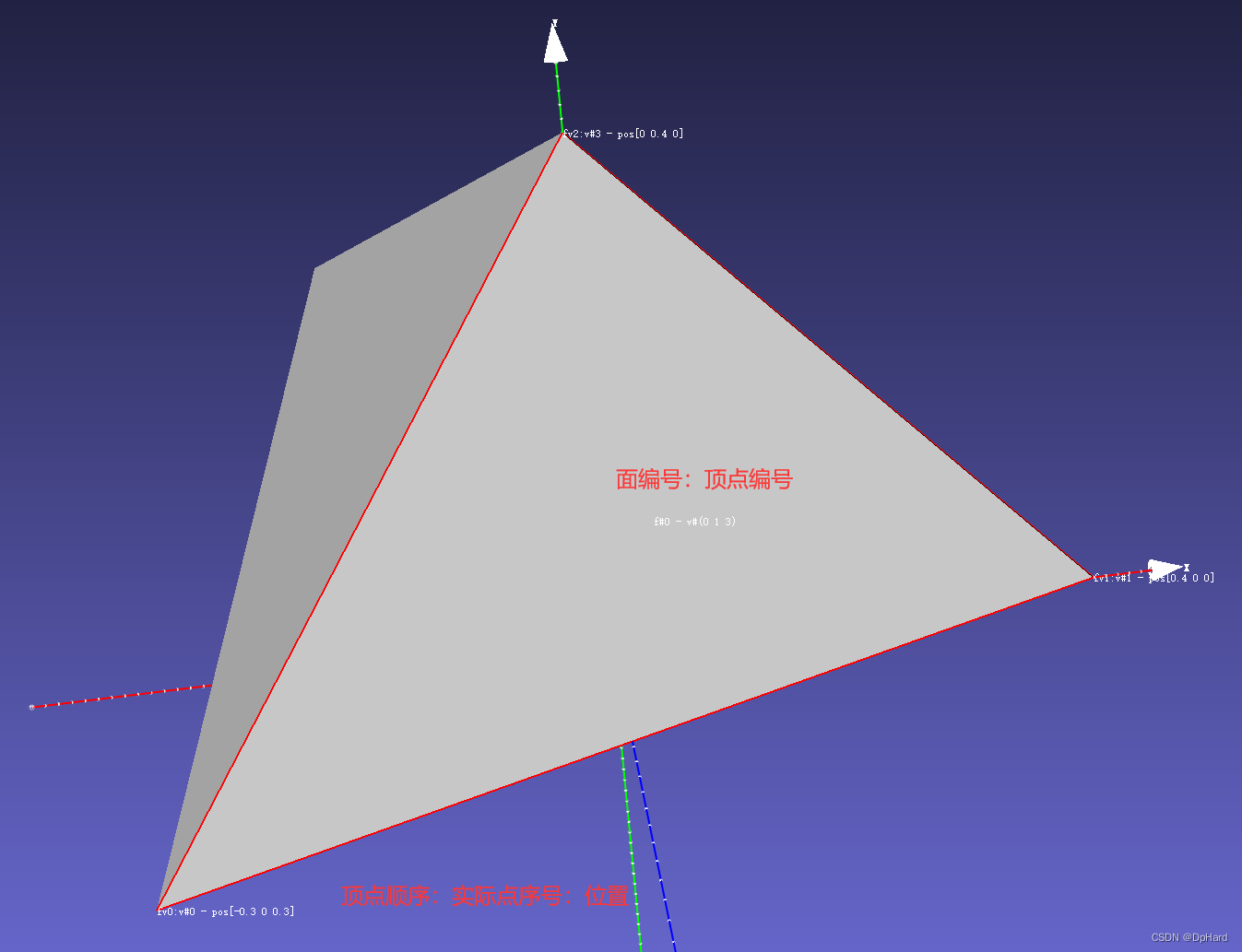
Meshlab
我们用 即可查看obj 文件的三角面片的详细信息
即可查看obj 文件的三角面片的详细信息
这里注意,所有的索引是从0开始
法线方向问题
我们知道叉乘的顺序将会影响到其方向。一般来讲在制造模型时,三点是按照一定顺序的,在这里是逆时针。如此以来,使用同样的叉乘计算顺序会让方向保持一致,我们期望法线的方向朝外。
例如 (v2-v0)x(v1-v0)会计算出朝内的法向,而这对于所有的面均同理。如此一来我们就可以利用这样的信息去背面剪裁
读取代码
c++的读取代码一般如下所示,这里是tinyrenderer的代码片段。你需要根据自己的结构体进行修改。
std::ifstream in;
in.open (filename, std::ifstream::in);
if (in.fail()) return;
std::string line;
while (!in.eof()) {
std::getline(in, line);
std::istringstream iss(line.c_str());
char trash;
if (!line.compare(0, 2, "v ")) {
iss >> trash;
Vec3f v;
for (int i=0;i<3;i++) iss >> v[i];
verts_.push_back(v);
} else if (!line.compare(0, 3, "vn ")) {
iss >> trash >> trash;
Vec3f n;
for (int i=0;i<3;i++) iss >> n[i];
norms_.push_back(n);
} else if (!line.compare(0, 3, "vt ")) {
iss >> trash >> trash;
Vec2f uv;
for (int i=0;i<2;i++) iss >> uv[i];
uv_.push_back(uv);
} else if (!line.compare(0, 2, "f ")) {
std::vector<Vec3i> f;
Vec3i tmp;
iss >> trash;
while (iss >> tmp[0] >> trash >> tmp[1] >> trash >> tmp[2]) {
for (int i=0; i<3; i++) tmp[i]--; // in wavefront obj all indices start at 1, not zero
f.push_back(tmp);
}
faces_.push_back(f);
}
}
std::cerr << "# v# " << verts_.size() << " f# " << faces_.size() << " vt# " << uv_.size() << " vn# " << norms_.size() << std::endl;
load_texture(filename, "_diffuse.tga", diffusemap_);
load_texture(filename, "_nm.tga", normalmap_);
load_texture(filename, "_spec.tga", specularmap_);