最近有个科研项目需要用到ROV,其合同三年之前就签订了,由于疫情的影响,一直没有执行。刚好我们的ROV也验收了,正好派上用场。因为属于ROV使用的菜鸟级,我们邀请厂家无锡智海张工和陈工,中海辉固ROV操作经验丰富的韦工帮助完成这次任务。
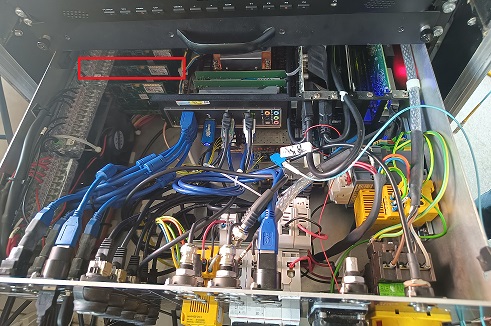
ROV是端午节前一天运到试验船。整个端午节三天我们都在调试安装ROV。ROV室内安装见下图。

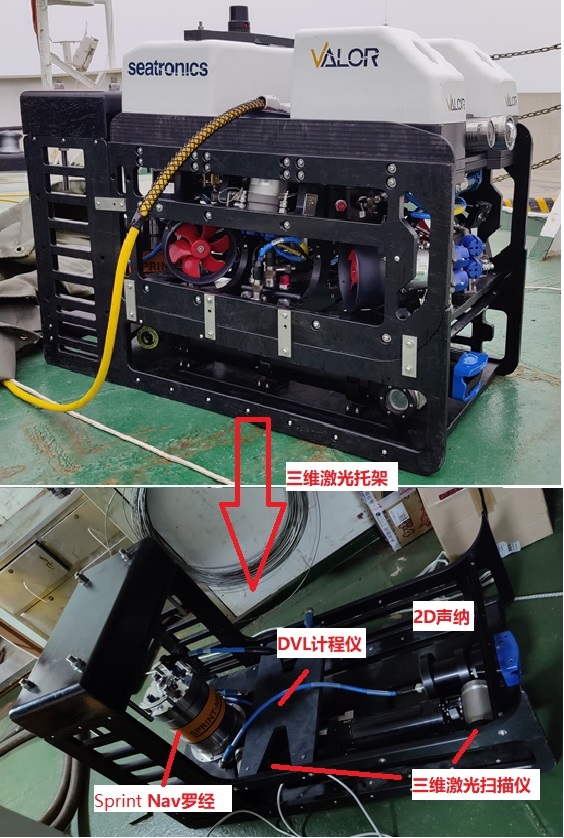
室外ROV使用大托架,搭载SprintNav罗经和姿态仪,DVL计程仪,二维声纳,三维激光扫描仪以及黑白和彩色照相机。
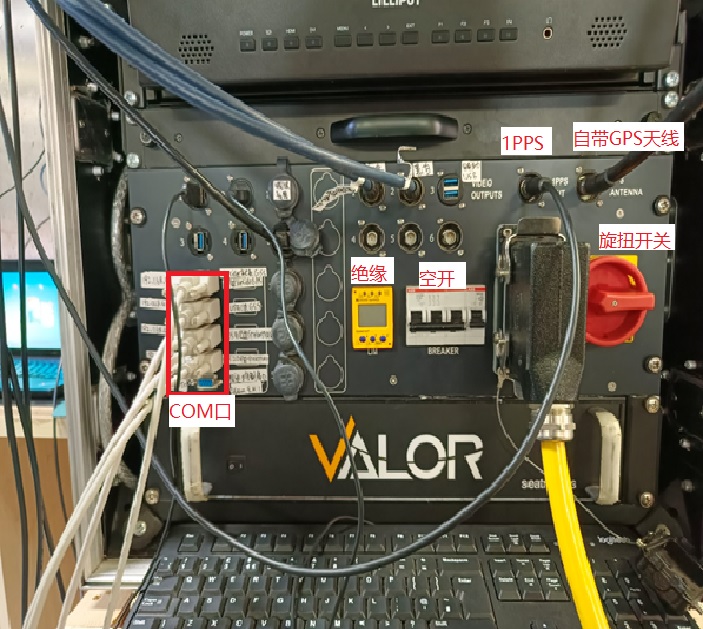
我们再次复习一下ROV的开机顺序:
1)合上空气开关;2)旋钮顺时针打到ON;3)空气开关自动跳开;4)绝缘检测,屏幕显示4.0M欧,绿灯亮,表示检测正常;5)ROV控制系统(GSS)的电源模块(PSU)三个按钮(Power、Deck check和Full Power)为灰白色,外框为红色;6)合上空气开关ON,PSU按钮变为白色,外框变为绿色;7)点击POWER白色按钮,POWER和Deck check按钮变绿色;8)检测ROV各系统是否正常,比如倾斜模块(Tilt)的灰白色按钮和红色外框变成白色按钮和绿色外框;9)系统是Ubuntu,使用快捷键F1,F2,ALT+3切换和调出窗口,给水下设备(Subsea USPS)上电,10)甲板测试正常以后,下水作业,点击Full Power按钮。
遇到的问题及解决方法总结如下:
1、甲板检查(Deck Check)的问题
ROV指示灯亮,表示电已经到ROV ,然后ROV进行系统自检,直到Tilt的外框从红色变成绿色。

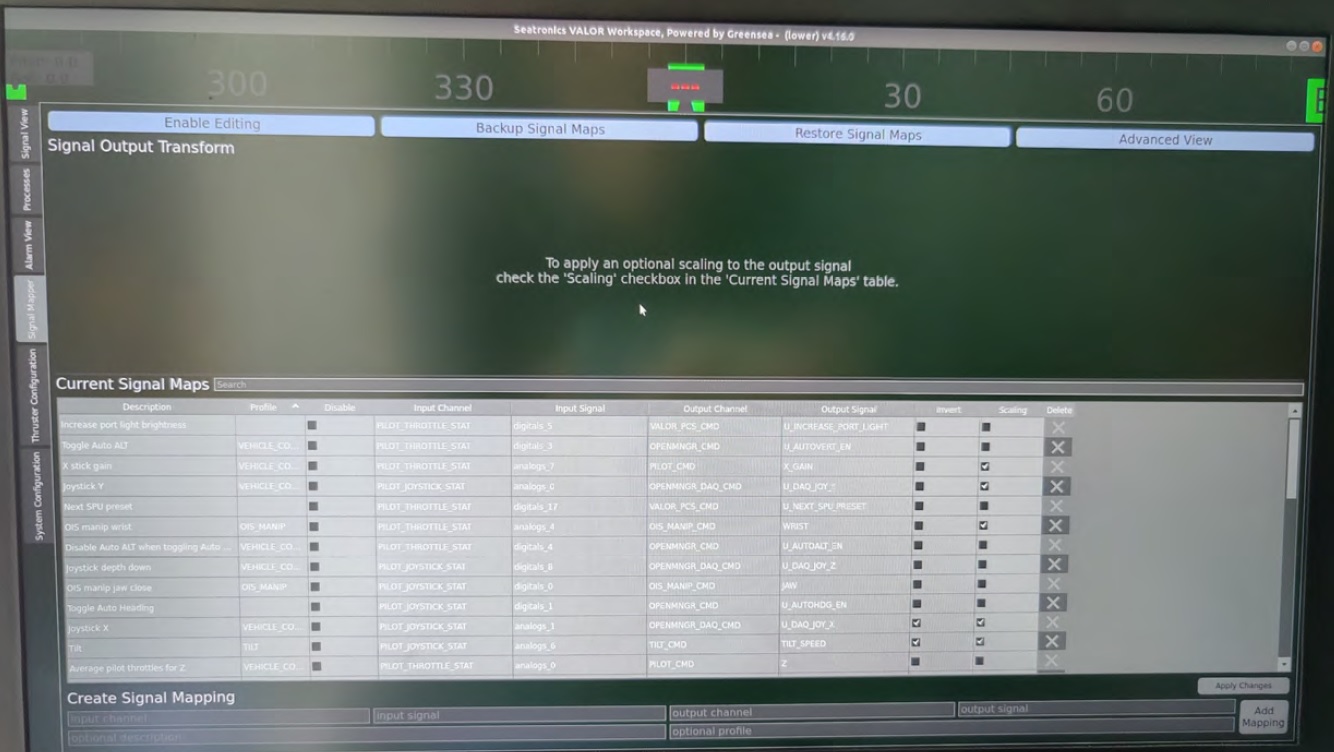
Tilt外框变成绿色,表示自检的最后一步成功,如果推进器状态不正常,Tilt外框也会是红的。正常情况下,Tilt外框从红色变成绿色的时间大约几分钟。有一次,Tilt外框变成绿色以后,过一段时间,又变成红色,且红绿色不断交替,当Tilt外框为红色时,推进器状态也不正常,我们随后紧固了推进器的连接线,Tilt外框的颜色仍然时红绿色交替,于是,首先断开云台线,Tilt外框马上变成绿色,推进器状态正常,故障的原因可能是云台内部的电子仓或者云台线有问题,系统自检通不过。韦工说,云台线会经常坏,过一段时间就要更换。由于云台线插头没有堵头,在水下,云台线不能断开,在系统配置窗口的Tilt设置行,关闭云台功能也可以达到同样的效果。
2、光纤熔接的问题
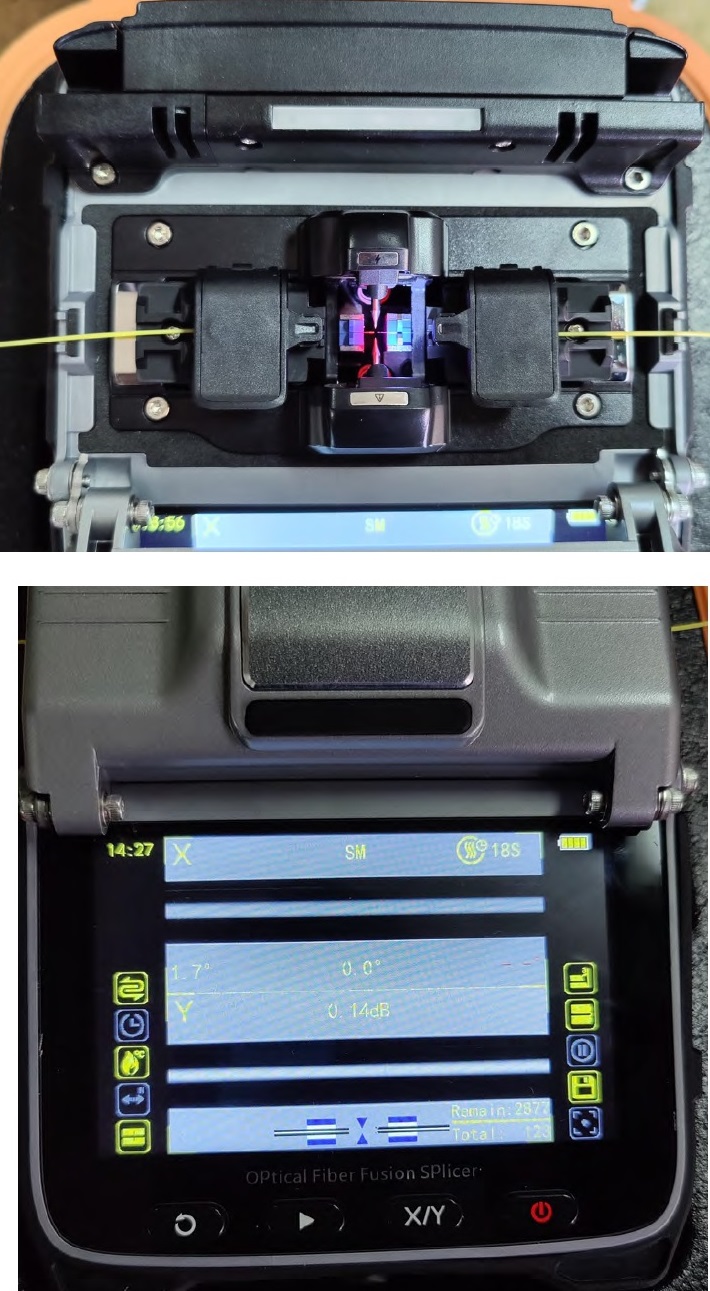
光纤容易断,所以,熔接光纤是一个细致活。光纤线拨好剪齐以后,上光纤熔接机对齐自动熔接。有时,即使对齐了,光纤不自动熔接,可手动强制熔接。光纤熔接是否成功可通过打光测试,或直接进行通讯测试。一般单模光纤与单模光纤熔接,多模光纤与多模光纤熔接。单模与多模也可以熔接,熔接后好像有个断点,但是打光和通讯测试都没有问题。
如果熔接两端都是光纤尾线,光纤熔接处加一个光纤热缩管就可以。如果一端不是光纤尾纤而是很细很脆的光纤线,仅光纤热缩管是不够的,因为光纤热缩管的非尾纤端很容易弯曲折断,推荐的做法是在细脆的光纤上套两层普通热缩管,细的热缩管伸到光纤热缩管内,粗的热缩管套在光纤热缩管之上。有时,我们还会在粗的热缩管之上套上塑料管,进一步保护光纤。

本次追求完美,想将熔接好的光纤弯曲塞在接线盒,但是一旦将光纤塞到接线盒中,光纤就折断了,我们尝试了好几次,花费了整整一天时间,最终还是无奈地放弃了。

3、ROV本体磁罗经与SprintNav罗经不匹配的问题
ROV本体自带一个磁罗经,由于其所处环境不同,磁罗经方向与实际方向差别不同,差别十几度和几十度都有可能。一般要求差别10度以内。ROV搭载的SprintNav罗经是陀螺罗经,比磁罗经更为准确,因此,磁罗经的方向需要修正与陀螺罗经保持一致。本次两个罗经方向的差别为几十度,磁罗经方向需要修正。修正磁罗经方向步骤为:点击Spatial Manager.ja文件,连接磁罗经,在磁罗经的配置页面输入偏移量。



4、浮力配平的问题
浮力配平需要考虑ROV本体和搭载设备水重、浮力材料的浮力以及它们的空间分布。
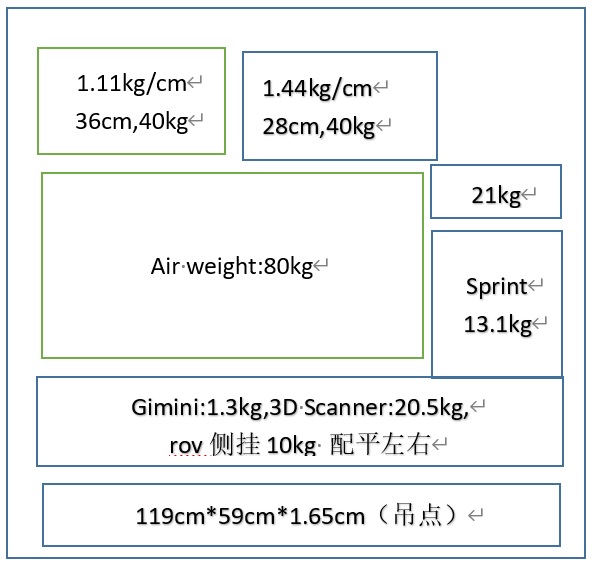
要求ROV在水中为零浮力或微正浮力,且在水中的倾斜小于10度。另外,ROV顶面最好也是平的,因为安装配置时,ROV需要经常翻过来,底朝天。

5、ROV突然跳电的问题
在水下作业的时候,ROV突然跳电,报insulation Alarm(绝缘报警),绝缘液晶小屏上面两个橙色指示灯亮。此时,ROV失去了动力,由于ROV是零浮力,通过拖缆可将其拽出水面。ROV上岸以后,韦工直接将ROV端约1m的接头缆砍断,重新做头,理由是绝缘报警难以查找原因,多半来自于ROV端接头缆。
6、水下三维激光扫描仪的问题
本次主要实验三维激光扫描仪在水下成像的问题。虽然试验场是近海,但水的能见度还可以,水下照相机成像非常清晰,但是三维激光扫描仪要么没有回波要么回来全是噪声。我们一度怀疑三维激光扫描仪坏了,于是,将ROV拉上岸,太阳光照射下,三维激光扫描仪没有回波,但是罩上帆布或者在夜晚,三维激光扫描仪能够成像,噪声较少。这证明三维激光扫描仪是好的,同时也说明三维激光扫描仪对水质要求非常高,适合于远离海岸的深海。三维激光扫描仪数据融合采集使用EIVA软件的NaviScan模块,点云建模使用NaviModel。博主将在以后的文章中专门介绍EIVA软件。
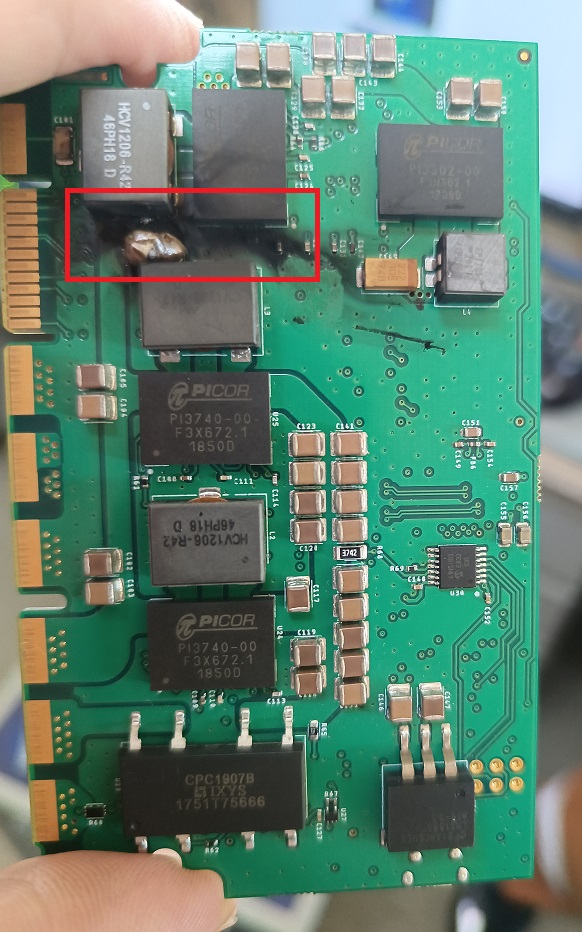
7、控制水下设备通讯板卡的两个电阻烧掉
ROV的甲板单元从上往下数第2个COM口通讯(USBL进GSS)故障,经检查,对应板卡有2个小电阻爆掉了,在电子维修城维修后,仍然不能正常使用。
8、一些小技巧
如果很长的粗缆里有很多根电缆,一端知道电缆的正负极,一端不知道,可以用地线或屏蔽线作为载体,通过电缆是否连通来来判断未知端电缆的正负极,不用将未知端拉到已知端再测试。
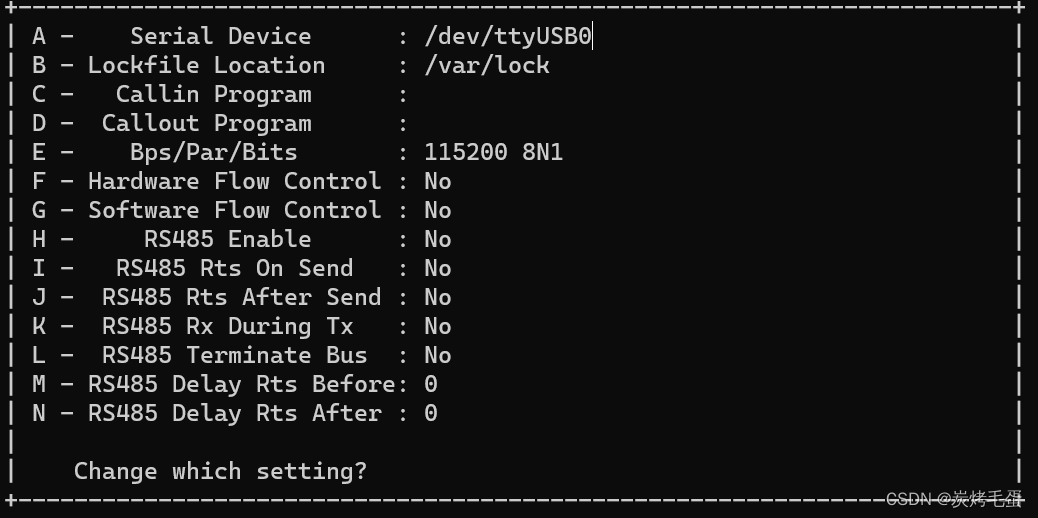
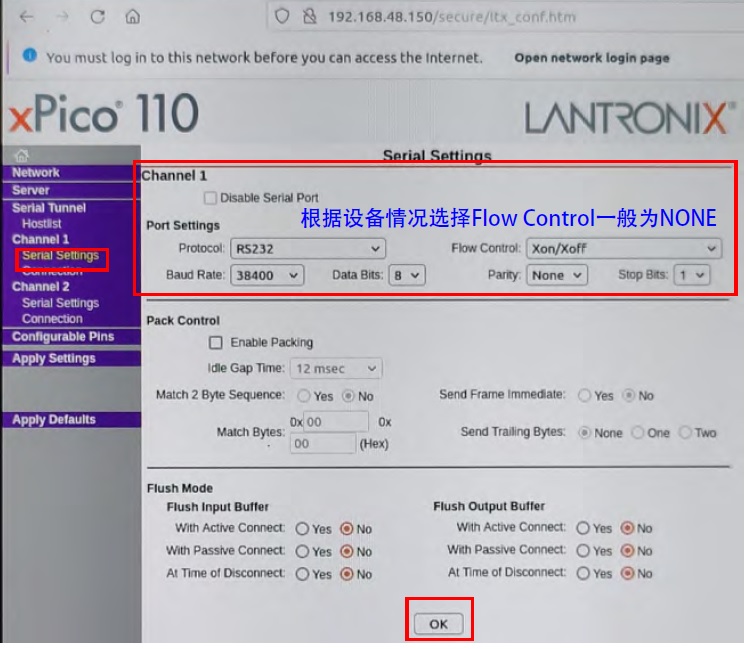
串口配置时,发射端和接收端要一致,否则,通讯不正常。
在绝缘油中操作接线也是可以的。

判断绝缘油中是否有水,看是否有水泡。
9、小结
文后再次感谢无锡智海张工和陈工大力支持和帮助。特别感谢中海辉固韦工的技术支持,他的ROV操作非常专业,让我们大开眼界,中海辉固不愧是中国ROV操作手的摇篮。
本次三维激光扫描仪扫测结果不是很理想,主要是水质的原因,业主王老师可能会在南海再开一局,我们也期待再次相聚。