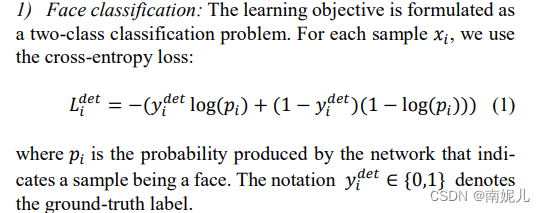
MTCNN 人脸检测
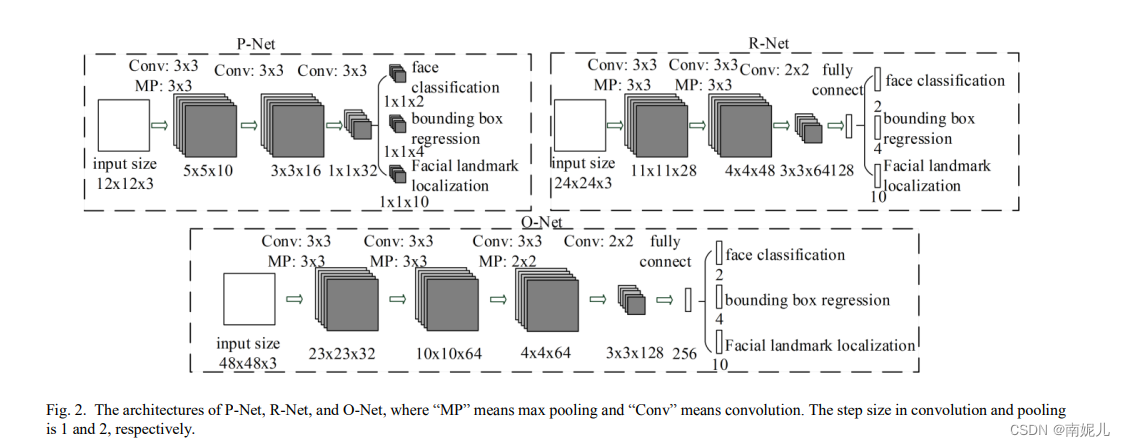
MTCNN,Multi-task convolutional neural network(多任务卷积神经网络),将人脸区域检测与人脸关键点检测放在了一起,它的主题框架类似于cascade。总体可分为P-Net、R-Net、和O-Net三层网络结构。这三个级联的网络分别是快速生成候选窗口的P-Net、进行高精度候选窗口过滤选择的R-Net和生成最终边界框与人脸关键点的O-Net。和很多处理图像问题的卷积神经网络模型,该模型也用到了图像金字塔、边框回归、非最大值抑制等技术。



参考文献
【论文解析】MTCNN论文要点翻译 - 向前奔跑的少年 - 博客园 (cnblogs.com)
Faster RCNN
YOLOV1
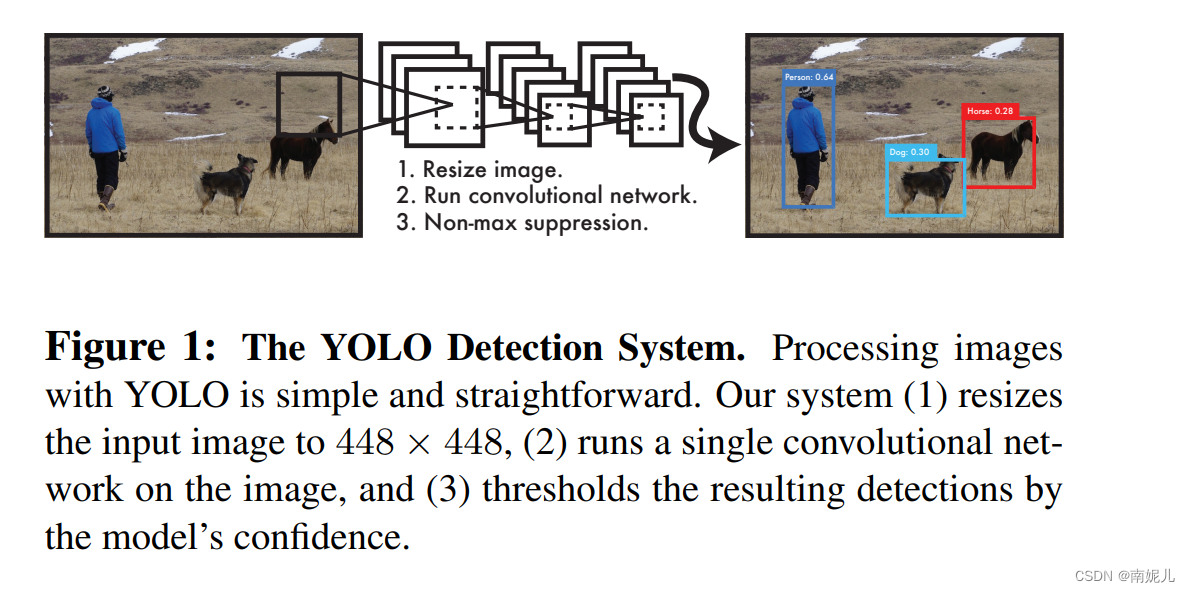
yolov1 的处理步骤:首先将图片调整为448,然后输入网络,最后通过置信度进行非极大抑制
检测框架
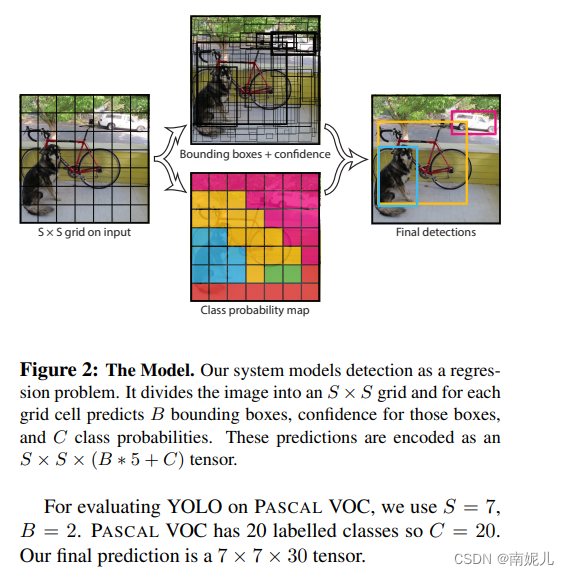
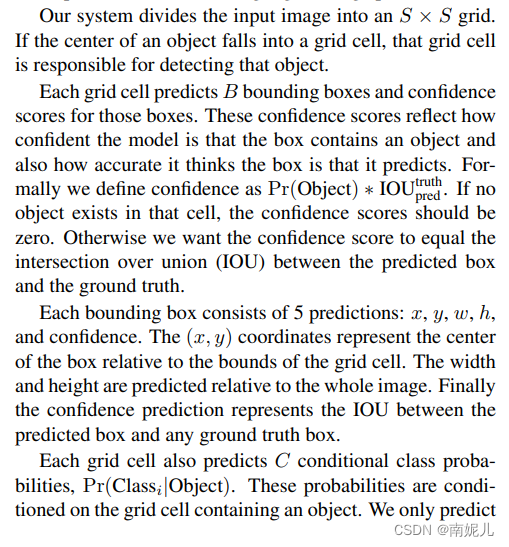
YOLO将检测问题看作是一个回归问题。YOLO将输入图像分为SxS的网格,如果一个物体的中心点落入网络中,则该网格负责检测该物体。
对于每一个网格会预测B个边界框,每一个边界框包含了5个张量,x,y,w,h,置信度。其中置信度的定义![]()
置信度反应了该边界框是否包含物体以及包含物体的可能性。
x,y 是相对于网格左上角归一化后的坐标。
w,h是边界框的宽和高相较于图像宽和高归一化后的结果。
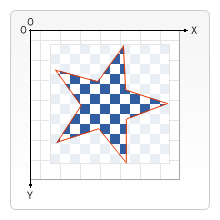
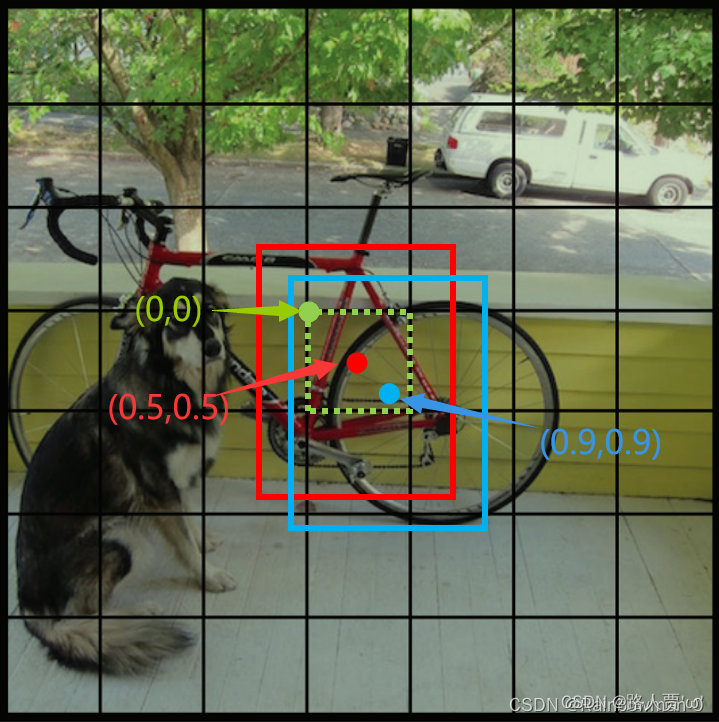
● x,y: 是指bounding box的预测框的中心坐标相较于该bounding box归属的grid cell左上角的偏移量,在0-1之间。
在上图中,绿色虚线框代表grid cell,绿点表示该grid cell的左上角坐标,为(0,0);红色和蓝色框代表该grid cell包含的两个bounding box,红点和蓝点表示这两个bounding box的中心坐标。有一点很重要,bounding box的中心坐标一定在该grid cell内部,因此,红点和蓝点的坐标可以归一化在0-1之间。在上图中,红点的坐标为(0.5,0.5),即x=y=0.5,蓝点的坐标为(0.9,0.9),即x=y=0.9。
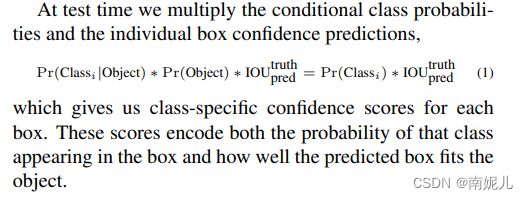
在测试时,将置信度分数和类别分数相乘得到:
![]()
这表示 每个边界框的类别概率。注意这里每个网格负责检测一个物体,所以在测试时会选择置信度比较大的边界框进行检测。
网络结构
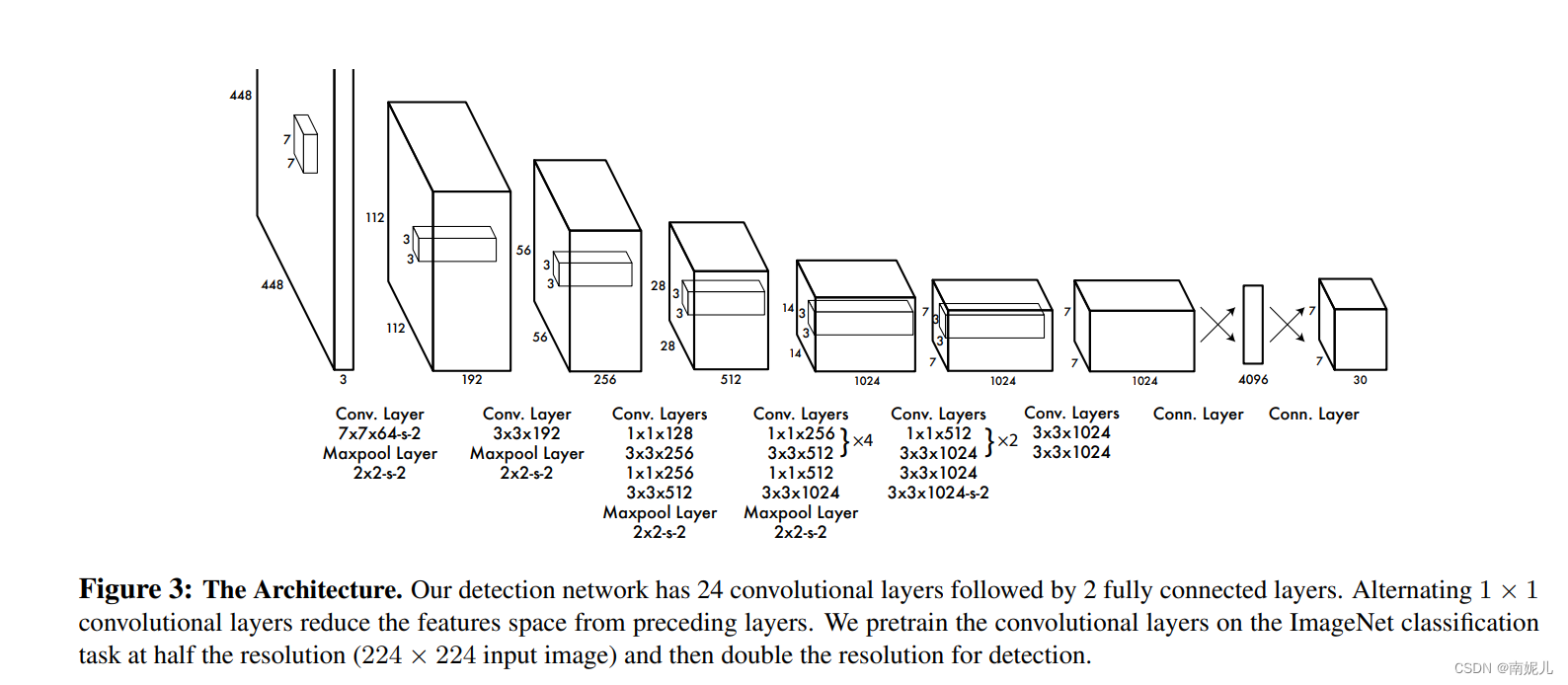
YOLO主要是建立一个CNN网络生成预测7×7×1024 的张量 ,然后通过两个全连接层进行线性回归。
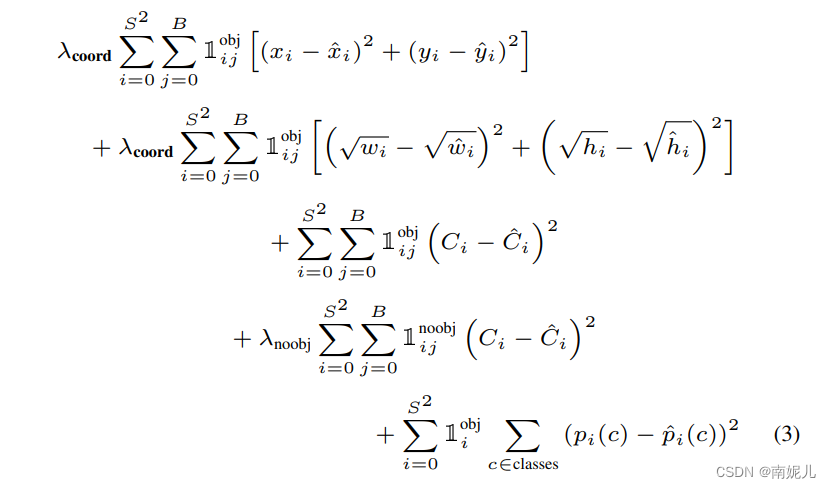
为了优化目标,作者采取了平均差进行优化。但是平方差并不能提高MAP。为了提高定位精度,作者在坐标损失前加入一个参数。有些边界框并不包含物体,所以作者对于不包含物体的边界框赋予更小的权重。对于大框的小偏差和小框的大偏差的重要性是不一样的,所以对于宽和高进行开平方。
代码
从零开始实现yolov1目标检测算法
准备数据
"""
数据准备,将数据处理为两个文件,一个是train.csv,另一个是train.txt。同理也会有test.csv, test.txt
train.csv: 每一行是一张图片的标签,具体储存情况根据不同任务的需求自行设定
train.txt: 每一行是图片的路径,该文件每行的图片和train.csv的每一行标注应该是一一对应的
另外,根据需要将图片稍微离线处理一下,比如将原图片裁剪出训练使用的图片(resize成训练要求大小)后,保存在自定义文件夹中,train.txt里的路径应与自定义文件夹相同
"""
import xml.etree.ElementTree as ET
import numpy as np
import cv2
import random
import os
GL_CLASSES = ['person', 'bird', 'cat', 'cow', 'dog', 'horse', 'sheep',
'aeroplane', 'bicycle', 'boat', 'bus', 'car', 'motorbike', 'train',
'bottle', 'chair', 'diningtable', 'pottedplant', 'sofa', 'tvmonitor']
GL_NUMBBOX = 2
GL_NUMGRID = 7
STATIC_DATASET_PATH = r'./VOCdevkit/VOC2012/'
STATIC_DEBUG = False # 调试用
def convert(size, box):
"""将bbox的左上角点、右下角点坐标的格式,转换为bbox中心点+bbox的w,h的格式
并进行归一化"""
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def convert_annotation(anno_dir, image_id, labels_dir):
"""把图像image_id的xml文件转换为目标检测的label文件(txt)
其中包含物体的类别,bbox的左上角点坐标以及bbox的宽、高
并将四个物理量归一化"""
in_file = open(os.path.join(anno_dir, 'Annotations/%s' % (image_id)))
image_id = image_id.split('.')[0]
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in GL_CLASSES or int(difficult) == 1:
continue
cls_id = GL_CLASSES.index(cls)
xmlbox = obj.find('bndbox')
points = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w, h), points)
with open(os.path.join(labels_dir, '%s.txt' % (image_id)), 'a') as out_file:
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
def make_label_txt(anno_dir, labels_dir):
"""在labels文件夹下创建image_id.txt,对应每个image_id.xml提取出的bbox信息"""
filenames = os.listdir(os.path.join(anno_dir,'Annotations'))[:13]
for file in filenames:
convert_annotation(anno_dir, file, labels_dir)
def img_augument(img_dir, save_img_dir, labels_dir):
imgs_list = [x.split('.')[0]+".jpg" for x in os.listdir(labels_dir)]
for img_name in imgs_list:
print("process %s"%os.path.join(img_dir, img_name))
img = cv2.imread(os.path.join(img_dir, img_name))
h, w = img.shape[0:2]
input_size = 448 # 输入YOLOv1网络的图像尺寸为448x448
# 因为数据集内原始图像的尺寸是不定的,所以需要进行适当的padding,将原始图像padding成宽高一致的正方形
# 然后再将Padding后的正方形图像缩放成448x448
padw, padh = 0, 0 # 要记录宽高方向的padding具体数值,因为padding之后需要调整bbox的位置信息
if h > w:
padw = (h - w) // 2
img = np.pad(img, ((0, 0), (padw, padw), (0, 0)), 'constant', constant_values=0)
elif w > h:
padh = (w - h) // 2
img = np.pad(img, ((padh, padh), (0, 0), (0, 0)), 'constant', constant_values=0)
img = cv2.resize(img, (input_size, input_size))
cv2.imwrite(os.path.join(save_img_dir, img_name), img)
# 读取图像对应的bbox信息,按1维的方式储存,每5个元素表示一个bbox的(cls,xc,yc,w,h)
with open(os.path.join(labels_dir,img_name.split('.')[0] + ".txt"), 'r') as f:
bbox = f.read().split('\n')
bbox = [x.split() for x in bbox]
bbox = [float(x) for y in bbox for x in y]
if len(bbox) % 5 != 0:
raise ValueError("File:"
+ os.path.join(labels_dir,img_name.split('.')[0] + ".txt") + "——bbox Extraction Error!")
# 根据padding、图像增广等操作,将原始的bbox数据转换为修改后图像的bbox数据
if padw != 0:
for i in range(len(bbox) // 5):
bbox[i * 5 + 1] = (bbox[i * 5 + 1] * w + padw) / h
bbox[i * 5 + 3] = (bbox[i * 5 + 3] * w) / h
if STATIC_DEBUG:
cv2.rectangle(img, (int(bbox[1] * input_size - bbox[3] * input_size / 2),
int(bbox[2] * input_size - bbox[4] * input_size / 2)),
(int(bbox[1] * input_size + bbox[3] * input_size / 2),
int(bbox[2] * input_size + bbox[4] * input_size / 2)), (0, 0, 255))
elif padh != 0:
for i in range(len(bbox) // 5):
bbox[i * 5 + 2] = (bbox[i * 5 + 2] * h + padh) / w
bbox[i * 5 + 4] = (bbox[i * 5 + 4] * h) / w
if STATIC_DEBUG:
cv2.rectangle(img, (int(bbox[1] * input_size - bbox[3] * input_size / 2),
int(bbox[2] * input_size - bbox[4] * input_size / 2)),
(int(bbox[1] * input_size + bbox[3] * input_size / 2),
int(bbox[2] * input_size + bbox[4] * input_size / 2)), (0, 0, 255))
# 此处可以写代码验证一下,查看padding后修改的bbox数值是否正确,在原图中画出bbox检验
if STATIC_DEBUG:
cv2.imshow("bbox-%d"%int(bbox[0]), img)
cv2.waitKey(0)
with open(os.path.join(labels_dir, img_name.split('.')[0] + ".txt"), 'w') as f:
for i in range(len(bbox) // 5):
bbox = [str(x) for x in bbox[i*5:(i*5+5)]]
str_context = " ".join(bbox)+'\n'
f.write(str_context)
def convert_bbox2labels(bbox):
"""将bbox的(cls,x,y,w,h)数据转换为训练时方便计算Loss的数据形式(7,7,5*B+cls_num)
注意,输入的bbox的信息是(xc,yc,w,h)格式的,转换为labels后,bbox的信息转换为了(px,py,w,h)格式"""
gridsize = 1.0/GL_NUMGRID
labels = np.zeros((7,7,5*GL_NUMBBOX+len(GL_CLASSES))) # 注意,此处需要根据不同数据集的类别个数进行修改
for i in range(len(bbox)//5):
gridx = int(bbox[i*5+1] // gridsize) # 当前bbox中心落在第gridx个网格,列
gridy = int(bbox[i*5+2] // gridsize) # 当前bbox中心落在第gridy个网格,行
# (bbox中心坐标 - 网格左上角点的坐标)/网格大小 ==> bbox中心点的相对位置
gridpx = bbox[i * 5 + 1] / gridsize - gridx
gridpy = bbox[i * 5 + 2] / gridsize - gridy
# 将第gridy行,gridx列的网格设置为负责当前ground truth的预测,置信度和对应类别概率均置为1
labels[gridy, gridx, 0:5] = np.array([gridpx, gridpy, bbox[i * 5 + 3], bbox[i * 5 + 4], 1])
labels[gridy, gridx, 5:10] = np.array([gridpx, gridpy, bbox[i * 5 + 3], bbox[i * 5 + 4], 1])
labels[gridy, gridx, 10+int(bbox[i*5])] = 1
labels = labels.reshape(1, -1)
return labels
def create_csv_txt(img_dir, anno_dir, save_root_dir, train_val_ratio=0.9, padding=10, debug=False):
"""
TODO:
将img_dir文件夹内的图片按实际需要处理后,存入save_dir
最终得到图片文件夹及所有图片对应的标注(train.csv/test.csv)和图片列表文件(train.txt, test.txt)
"""
labels_dir = os.path.join(anno_dir, "labels")
if not os.path.exists(labels_dir):
os.mkdir(labels_dir)
make_label_txt(anno_dir, labels_dir)
print("labels done.")
save_img_dir = os.path.join(os.path.join(anno_dir, "voc2012_forYolov1"), "img")
if not os.path.exists(save_img_dir):
os.mkdir(save_img_dir)
img_augument(img_dir, save_img_dir, labels_dir)
imgs_list = os.listdir(save_img_dir)
n_trainval = len(imgs_list)
shuffle_id = list(range(n_trainval))
random.shuffle(shuffle_id)
n_train = int(n_trainval*train_val_ratio)
train_id = shuffle_id[:n_train]
test_id = shuffle_id[n_train:]
traintxt = open(os.path.join(save_root_dir, "train.txt"), 'w')
traincsv = np.zeros((n_train, GL_NUMGRID*GL_NUMGRID*(5*GL_NUMBBOX+len(GL_CLASSES))),dtype=np.float32)
for i,id in enumerate(train_id):
img_name = imgs_list[id]
img_path = os.path.join(save_img_dir, img_name)+'\n'
traintxt.write(img_path)
with open(os.path.join(labels_dir,"%s.txt"%img_name.split('.')[0]), 'r') as f:
bbox = [float(x) for x in f.read().split()]
traincsv[i,:] = convert_bbox2labels(bbox)
np.savetxt(os.path.join(save_root_dir, "train.csv"), traincsv)
print("Create %d train data." % (n_train))
testtxt = open(os.path.join(save_root_dir, "test.txt"), 'w')
testcsv = np.zeros((n_trainval - n_train, GL_NUMGRID*GL_NUMGRID*(5*GL_NUMBBOX+len(GL_CLASSES))),dtype=np.float32)
for i,id in enumerate(test_id):
img_name = imgs_list[id]
img_path = os.path.join(save_img_dir, img_name)+'\n'
testtxt.write(img_path)
with open(os.path.join(labels_dir,"%s.txt"%img_name.split('.')[0]), 'r') as f:
bbox = [float(x) for x in f.read().split()]
testcsv[i,:] = convert_bbox2labels(bbox)
np.savetxt(os.path.join(save_root_dir, "test.csv"), testcsv)
print("Create %d test data." % (n_trainval-n_train))
if __name__ == '__main__':
random.seed(0)
np.set_printoptions(threshold=np.inf)
img_dir = os.path.join(STATIC_DATASET_PATH, "JPEGImages") # 原始图像文件夹
anno_dirs = [STATIC_DATASET_PATH] # 标注文件
save_dir = os.path.join(STATIC_DATASET_PATH, "voc2012_forYolov1") # 保存处理后的数据(图片+标签)的文件夹
if not os.path.exists(save_dir):
os.mkdir(save_dir)
# 分别处理
for anno_dir in anno_dirs:
create_csv_txt(img_dir, anno_dir, save_dir, debug=False)

上面这个函数负责提取xml文件中的边框信息,并且把边框信息归一化,保存为下面的类型。其中第一项表示类别,后面是归一化后的中心的坐标和归一化后的宽和高

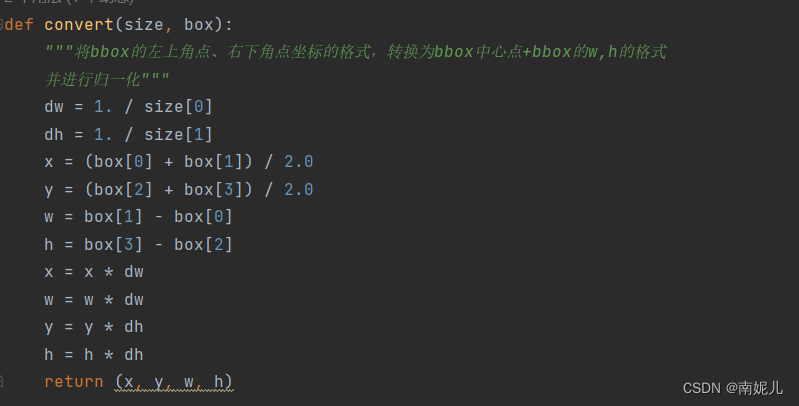
上面这个函数负责将坐标进行归一化。

def convert_bbox2labels(bbox):
"""将bbox的(cls,x,y,w,h)数据转换为训练时方便计算Loss的数据形式(7,7,5*B+cls_num)
注意,输入的bbox的信息是(xc,yc,w,h)格式的,转换为labels后,bbox的信息转换为了(px,py,w,h)格式"""
gridsize = 1.0/GL_NUMGRID
labels = np.zeros((7,7,5*GL_NUMBBOX+len(GL_CLASSES))) # 注意,此处需要根据不同数据集的类别个数进行修改
for i in range(len(bbox)//5):
gridx = int(bbox[i*5+1] // gridsize) # 当前bbox中心落在第gridx个网格,列
gridy = int(bbox[i*5+2] // gridsize) # 当前bbox中心落在第gridy个网格,行
# (bbox中心坐标 - 网格左上角点的坐标)/网格大小 ==> bbox中心点的相对位置
gridpx = bbox[i * 5 + 1] / gridsize - gridx
gridpy = bbox[i * 5 + 2] / gridsize - gridy
# 将第gridy行,gridx列的网格设置为负责当前ground truth的预测,置信度和对应类别概率均置为1
labels[gridy, gridx, 0:5] = np.array([gridpx, gridpy, bbox[i * 5 + 3], bbox[i * 5 + 4], 1])
labels[gridy, gridx, 5:10] = np.array([gridpx, gridpy, bbox[i * 5 + 3], bbox[i * 5 + 4], 1])
labels[gridy, gridx, 10+int(bbox[i*5])] = 1
labels = labels.reshape(1, -1)
return labels该函数将bbox转换为labels。
data.py
from torch.utils.data import Dataset, DataLoader
import numpy as np
import os
import random
import torch
from PIL import Image
import torchvision.transforms as transforms
class MyDataset(Dataset):
def __init__(self, dataset_dir, seed=None, mode="train", train_val_ratio=0.9, trans=None):
"""
:param dataset_dir: 数据所在文件夹
:param seed: 打乱数据所用的随机数种子
:param mode: 数据模式,"train", "val", "test"
:param train_val_ratio: 训练时,训练集:验证集的比例
:param trans: 数据预处理函数
TODO:
1. 读取储存图片路径的.txt文件,并保存在self.img_list中
2. 读取储存样本标签的.csv文件,并保存在self.label中
3. 如果mode="train", 将数据集拆分为训练集和验证集,用self.use_ids来保存对应数据集的样本序号。
注意,mode="train"和"val"时,必须传入随机数种子,且两者必须相同
4. 保存传入的数据增广函数
"""
if seed is None:
seed = random.randint(0, 65536)
random.seed(seed)
self.dataset_dir = dataset_dir
self.mode = mode
if mode=="val":
mode = "train"
img_list_txt = os.path.join(dataset_dir, mode+".txt").replace('\\','/') # 储存图片位置的列表
label_csv = os.path.join(dataset_dir, mode+".csv").replace('\\','/') # 储存标签的数组文件
self.img_list = []
self.label = np.loadtxt(label_csv) # 读取标签数组文件
# 读取图片位置文件
with open(img_list_txt, 'r') as f:
for line in f.readlines():
self.img_list.append(line.strip())
# 在mode=train或val时, 将数据进行切分
# 注意在mode="val"时,传入的随机种子seed要和mode="train"相同
self.num_all_data = len(self.img_list)
all_ids = list(range(self.num_all_data))
num_train = int(train_val_ratio*self.num_all_data)
if self.mode == "train":
self.use_ids = all_ids[:num_train]
elif self.mode == "val":
self.use_ids = all_ids[num_train:]
else:
self.use_ids = all_ids
# 储存数据增广函数
self.trans = trans
def __len__(self):
"""获取数据集数量"""
return len(self.use_ids)
def __getitem__(self, item):
"""
TODO:
1. 按顺序依次取出第item个训练数据img及其对应的样本标签label
2. 图像数据要进行预处理,并最终转换为(c, h, w)的维度,同时转换为torch.tensor
3. 样本标签要按需要转换为指定格式的torch.tensor
"""
id = self.use_ids[item]
label = torch.tensor(self.label[id, :])
img_path = self.img_list[id]
img = Image.open(img_path)
if self.trans is None:
trans = transforms.Compose([
# transforms.Resize((112,112)),
transforms.ToTensor(),
])
else:
trans = self.trans
img = trans(img) # 图像预处理&数据增广
# transforms.ToPILImage()(img).show() # for debug
# print(label)
return img, label
if __name__ == '__main__':
# 调试用,依次取出数据看看是否正确
dataset_dir = "./VOCdevkit/VOC2012/voc2012_forYolov1"
dataset = MyDataset(dataset_dir)
image,label=dataset[1]
print(image.shape)
print(label.shape)
# dataloader = DataLoader(dataset, 1)
# for i in enumerate(dataloader):
# input("press enter to continue")model.py
import torch
import torch.nn as nn
import torchvision.models as tvmodel
from prepare_data import GL_CLASSES, GL_NUMBBOX, GL_NUMGRID
from util import calculate_iou
class MyNet(nn.Module):
"""
@ 网络实际名称
为了和后续接口对齐,此处类名固定为MyNet,具体是什么网络可以写在注释里。
"""
def __init__(self):
"""
:param args: 构建网络所需要的参数
TODO:
在__init__()函数里,将网络框架搭好,并存在self里
"""
super(MyNet, self).__init__()
resnet = tvmodel.resnet34(pretrained=True) # 调用torchvision里的resnet34预训练模型
resnet_out_channel = resnet.fc.in_features # 记录resnet全连接层之前的网络输出通道数,方便连入后续卷积网络中
self.resnet = nn.Sequential(*list(resnet.children())[:-2]) # 去除resnet的最后两层
# 以下是YOLOv1的最后四个卷积层
self.Conv_layers = nn.Sequential(
nn.Conv2d(resnet_out_channel, 1024, 3, padding=1),
nn.BatchNorm2d(1024), # 为了加快训练,这里增加了BN层,原论文里YOLOv1是没有的
nn.LeakyReLU(inplace=True),
nn.Conv2d(1024, 1024, 3, stride=2, padding=1),
nn.BatchNorm2d(1024),
nn.LeakyReLU(inplace=True),
nn.Conv2d(1024, 1024, 3, padding=1),
nn.BatchNorm2d(1024),
nn.LeakyReLU(inplace=True),
nn.Conv2d(1024, 1024, 3, padding=1),
nn.BatchNorm2d(1024),
nn.LeakyReLU(inplace=True),
)
# 以下是YOLOv1的最后2个全连接层
self.Conn_layers = nn.Sequential(
nn.Linear(GL_NUMGRID * GL_NUMGRID * 1024, 4096),
nn.LeakyReLU(inplace=True),
nn.Linear(4096, GL_NUMGRID * GL_NUMGRID * (5*GL_NUMBBOX+len(GL_CLASSES))),
nn.Sigmoid() # 增加sigmoid函数是为了将输出全部映射到(0,1)之间,因为如果出现负数或太大的数,后续计算loss会很麻烦
)
def forward(self, inputs):
"""
:param inputs: 输入网络的张量
:return: 输出网络的结果
TODO
根据网络的结构,完成网络的前向传播计算。
如果网络有多条分支,可以用self储存需要在别的地方使用的中间张量。
如果网络有多个输出,需要将多个输出按后续inference的需求打包输出
"""
x = self.resnet(inputs)
x = self.Conv_layers(x)
x = x.view(x.size()[0], -1)
x = self.Conn_layers(x)
self.pred = x.reshape(-1, (5 * GL_NUMBBOX + len(GL_CLASSES)), GL_NUMGRID, GL_NUMGRID) # 记住最后要reshape一下输出数据
return self.pred
def calculate_loss(self, labels):
"""
TODO: 根据labels和self.outputs计算训练loss
:param labels: (bs, n), 对应训练数据的样本标签
:return: loss数值
"""
self.pred = self.pred.double()
labels = labels.double()
num_gridx, num_gridy = GL_NUMGRID, GL_NUMGRID # 划分网格数量
noobj_confi_loss = 0. # 不含目标的网格损失(只有置信度损失)
coor_loss = 0. # 含有目标的bbox的坐标损失
obj_confi_loss = 0. # 含有目标的bbox的置信度损失
class_loss = 0. # 含有目标的网格的类别损失
n_batch = labels.size()[0] # batchsize的大小
# 可以考虑用矩阵运算进行优化,提高速度,为了准确起见,这里还是用循环
for i in range(n_batch): # batchsize循环
for n in range(num_gridx): # x方向网格循环
for m in range(num_gridy): # y方向网格循环
if labels[i, 4, m, n] == 1: # 如果包含物体
# 将数据(px,py,w,h)转换为(x1,y1,x2,y2)
# 先将px,py转换为cx,cy,即相对网格的位置转换为标准化后实际的bbox中心位置cx,xy
# 然后再利用(cx-w/2,cy-h/2,cx+w/2,cy+h/2)转换为xyxy形式,用于计算iou
bbox1_pred_xyxy = ((self.pred[i, 0, m, n] + n) / num_gridx - self.pred[i, 2, m, n] / 2,
(self.pred[i, 1, m, n] + m) / num_gridy - self.pred[i, 3, m, n] / 2,
(self.pred[i, 0, m, n] + n) / num_gridx + self.pred[i, 2, m, n] / 2,
(self.pred[i, 1, m, n] + m) / num_gridy + self.pred[i, 3, m, n] / 2)
bbox2_pred_xyxy = ((self.pred[i, 5, m, n] + n) / num_gridx - self.pred[i, 7, m, n] / 2,
(self.pred[i, 6, m, n] + m) / num_gridy - self.pred[i, 8, m, n] / 2,
(self.pred[i, 5, m, n] + n) / num_gridx + self.pred[i, 7, m, n] / 2,
(self.pred[i, 6, m, n] + m) / num_gridy + self.pred[i, 8, m, n] / 2)
bbox_gt_xyxy = ((labels[i, 0, m, n] + n) / num_gridx - labels[i, 2, m, n] / 2,
(labels[i, 1, m, n] + m) / num_gridy - labels[i, 3, m, n] / 2,
(labels[i, 0, m, n] + n) / num_gridx + labels[i, 2, m, n] / 2,
(labels[i, 1, m, n] + m) / num_gridy + labels[i, 3, m, n] / 2)
iou1 = calculate_iou(bbox1_pred_xyxy, bbox_gt_xyxy)
iou2 = calculate_iou(bbox2_pred_xyxy, bbox_gt_xyxy)
# 选择iou大的bbox作为负责物体
if iou1 >= iou2:
coor_loss = coor_loss + 5 * (torch.sum((self.pred[i, 0:2, m, n] - labels[i, 0:2, m, n]) ** 2) \
+ torch.sum((self.pred[i, 2:4, m, n].sqrt() - labels[i, 2:4, m, n].sqrt()) ** 2))
obj_confi_loss = obj_confi_loss + (self.pred[i, 4, m, n] - iou1) ** 2
# iou比较小的bbox不负责预测物体,因此confidence loss算在noobj中,注意,对于标签的置信度应该是iou2
noobj_confi_loss = noobj_confi_loss + 0.5 * ((self.pred[i, 9, m, n] - iou2) ** 2)
else:
coor_loss = coor_loss + 5 * (torch.sum((self.pred[i, 5:7, m, n] - labels[i, 5:7, m, n]) ** 2) \
+ torch.sum((self.pred[i, 7:9, m, n].sqrt() - labels[i, 7:9, m, n].sqrt()) ** 2))
obj_confi_loss = obj_confi_loss + (self.pred[i, 9, m, n] - iou2) ** 2
# iou比较小的bbox不负责预测物体,因此confidence loss算在noobj中,注意,对于标签的置信度应该是iou1
noobj_confi_loss = noobj_confi_loss + 0.5 * ((self.pred[i, 4, m, n] - iou1) ** 2)
class_loss = class_loss + torch.sum((self.pred[i, 10:, m, n] - labels[i, 10:, m, n]) ** 2)
else: # 如果不包含物体
noobj_confi_loss = noobj_confi_loss + 0.5 * torch.sum(self.pred[i, [4, 9], m, n] ** 2)
loss = coor_loss + obj_confi_loss + noobj_confi_loss + class_loss
# 此处可以写代码验证一下loss的大致计算是否正确,这个要验证起来比较麻烦,比较简洁的办法是,将输入的pred置为全1矩阵,再进行误差检查,会直观很多。
return loss / n_batch
def calculate_metric(self, preds, labels):
"""
TODO: 根据preds和labels,以及指定的评价方法计算网络效果得分, 网络validation时使用
:param preds: 预测数据
:param labels: 预测数据对应的样本标签
:return: 评估得分metric
"""
preds = preds.double()
labels = labels[:, :(self.n_points*2)]
l2_distance = torch.mean(torch.sum((preds-labels)**2, dim=1))
return l2_distance
if __name__ == '__main__':
# 自定义输入张量,验证网络可以正常跑通,并计算loss,调试用
x = torch.zeros(5,3,448,448)
net = MyNet()
a = net(x)
labels = torch.zeros(5, 30, 7, 7)
loss = net.calculate_loss(labels)
print(loss)
print(a.shape)
train.py
import os
import datetime
import time
import torch
from torch.utils.data import DataLoader
from model import MyNet
from data import MyDataset
from my_arguments import Args
from prepare_data import GL_CLASSES, GL_NUMBBOX, GL_NUMGRID
from util import labels2bbox
class TrainInterface(object):
"""
网络训练接口,
__train(): 训练过程函数
__validate(): 验证过程函数
__save_model(): 保存模型函数
main(): 训练网络主函数
"""
def __init__(self, opts):
"""
:param opts: 命令行参数
"""
self.opts = opts
print("=======================Start training.=======================")
@staticmethod
def __train(model, train_loader, optimizer, epoch, num_train, opts):
"""
完成一个epoch的训练
:param model: torch.nn.Module, 需要训练的网络
:param train_loader: torch.utils.data.Dataset, 训练数据集对应的类
:param optimizer: torch.optim.Optimizer, 优化网络参数的优化器
:param epoch: int, 表明当前训练的是第几个epoch
:param num_train: int, 训练集数量
:param opts: 命令行参数
"""
model.train()
device = opts.GPU_id
avg_metric = 0. # 平均评价指标
avg_loss = 0. # 平均损失数值
# log_file是保存网络训练过程信息的文件,网络训练信息会以追加的形式打印在log.txt里,不会覆盖原有log文件
log_file = open(os.path.join(opts.checkpoints_dir, "log.txt"), "a+")
localtime = datetime.datetime.now().strftime("%Y-%m-%d %H:%M:%S") # 打印训练时间
log_file.write(localtime)
log_file.write("\n======================training epoch %d======================\n"%epoch)
for i,(imgs, labels) in enumerate(train_loader):
labels = labels.view(1, GL_NUMGRID, GL_NUMGRID, 30)
labels = labels.permute(0,3,1,2)
if opts.use_GPU:
imgs = imgs.to(device)
labels = labels.to(device)
preds = model(imgs) # 前向传播
loss = model.calculate_loss(labels) # 计算损失
optimizer.zero_grad() # 梯度清零
loss.backward() # 反向传播
optimizer.step() # 优化网络参数
# metric = model.calculate_metric(preds, labels) # 计算评价指标
# avg_metric = (avg_metric*i+metric)/(i+1)
avg_loss = (avg_loss*i+loss.item())/(i+1)
if i % opts.print_freq == 0: # 根据打印频率输出log信息和训练信息
print("Epoch %d/%d | Iter %d/%d | training loss = %.3f, avg_loss = %.3f" %
(epoch, opts.epoch, i, num_train//opts.batch_size, loss.item(), avg_loss))
log_file.write("Epoch %d/%d | Iter %d/%d | training loss = %.3f, avg_loss = %.3f\n" %
(epoch, opts.epoch, i, num_train//opts.batch_size, loss.item(), avg_loss))
log_file.flush()
log_file.close()
@staticmethod
def __validate(model, val_loader, epoch, num_val, opts):
"""
完成一个epoch训练后的验证任务
:param model: torch.nn.Module, 需要训练的网络
:param _loader: torch.utils.data.Dataset, 验证数据集对应的类
:param epoch: int, 表明当前训练的是第几个epoch
:param num_val: int, 验证集数量
:param opts: 命令行参数
"""
model.eval()
log_file = open(os.path.join(opts.checkpoints_dir, "log.txt"), "a+")
log_file.write("======================validate epoch %d======================\n"%epoch)
preds = None
gts = None
avg_metric = 0.
with torch.no_grad(): # 加上这个可以减少在validation过程时的显存占用,提高代码的显存利用率
for i,(imgs, labels) in enumerate(val_loader):
if opts.use_GPU:
imgs = imgs.to(opts.GPU_id)
pred = model(imgs).cpu().squeeze(dim=0).permute(1,2,0)
pred_bbox = labels2bbox(pred) # 将网络输出经过NMS后转换为shape为(-1, 6)的bbox
metric = model.calculate_metric(preds, gts)
print("Evaluation of validation result: average L2 distance = %.5f"%(metric))
log_file.write("Evaluation of validation result: average L2 distance = %.5f\n"%(metric))
log_file.flush()
log_file.close()
return metric
@staticmethod
def __save_model(model, epoch, opts):
"""
保存第epoch个网络的参数
:param model: torch.nn.Module, 需要训练的网络
:param epoch: int, 表明当前训练的是第几个epoch
:param opts: 命令行参数
"""
model_name = "epoch%d.pth" % epoch
save_dir = os.path.join(opts.checkpoints_dir, model_name)
torch.save(model, save_dir)
def main(self):
"""
训练接口主函数,完成整个训练流程
1. 创建训练集和验证集的DataLoader类
2. 初始化带训练的网络
3. 选择合适的优化器
4. 训练并验证指定个epoch,保存其中评价指标最好的模型,并打印训练过程信息
5. TODO: 可视化训练过程信息
"""
opts = self.opts
if not os.path.exists(opts.checkpoints_dir):
os.mkdir(opts.checkpoints_dir)
random_seed = opts.random_seed
train_dataset = MyDataset(opts.dataset_dir, seed=random_seed, mode="train", train_val_ratio=0.9)
val_dataset = MyDataset(opts.dataset_dir, seed=random_seed, mode="val", train_val_ratio=0.9)
train_loader = DataLoader(train_dataset, opts.batch_size, shuffle=True, num_workers=opts.num_workers)
val_loader = DataLoader(val_dataset, batch_size=1, shuffle=False, num_workers=opts.num_workers)
num_train = len(train_dataset)
num_val = len(val_dataset)
if opts.pretrain is None:
model = MyNet()
else:
model = torch.load(opts.pretrain)
if opts.use_GPU:
model.to(opts.GPU_id)
optimizer = torch.optim.SGD(model.parameters(), lr=opts.lr, momentum=0.9, weight_decay=opts.weight_decay)
# optimizer = torch.optim.Adam(model.parameters(), lr=opts.lr, weight_decay=opts.weight_decay)
best_metric=1000000
for e in range(opts.start_epoch, opts.epoch+1):
t = time.time()
self.__train(model, train_loader, optimizer, e, num_train, opts)
t2 = time.time()
print("Training consumes %.2f second\n" % (t2-t))
with open(os.path.join(opts.checkpoints_dir, "log.txt"), "a+") as log_file:
log_file.write("Training consumes %.2f second\n" % (t2-t))
if e % opts.save_freq==0 or e == opts.epoch+1:
# t = time.time()
# metric = self.__validate(model, val_loader, e, num_val, opts)
# t2 = time.time()
# print("Validation consumes %.2f second\n" % (t2 - t))
# with open(os.path.join(opts.checkpoints_dir, "log.txt"), "a+") as log_file:
# log_file.write("Validation consumes %.2f second\n" % (t2 - t))
# if best_metric>metric:
# best_metric = metric
# print("Epoch %d is now the best epoch with metric %.4f\n"%(e, best_metric))
# with open(os.path.join(opts.checkpoints_dir, "log.txt"), "a+") as log_file:
# log_file.write("Epoch %d is now the best epoch with metric %.4f\n"%(e, best_metric))
self.__save_model(model, e, opts)
if __name__ == '__main__':
# 训练网络代码
args = Args()
args.set_train_args() # 获取命令行参数
train_interface = TrainInterface(args.get_opts())
train_interface.main() # 调用训练接口
utils.py
import torch
import torch.nn as nn
import numpy as np
class DepthwiseConv(nn.Module):
"""
深度可分离卷积层
"""
def __init__(self, in_channels, out_channels, kernel_size, stride, padding=0, bias=True):
super(DepthwiseConv, self).__init__()
self.layers = nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=in_channels, kernel_size=kernel_size, stride=stride,
padding=padding, groups=in_channels, bias=bias),
nn.BatchNorm2d(num_features=in_channels),
nn.ReLU(),
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1, bias=bias),
nn.BatchNorm2d(num_features=out_channels),
nn.ReLU()
)
def forward(self, inputs):
outputs = self.layers(inputs)
return outputs
class InvertedBottleneck(nn.Module):
"""
MobileNet v2 的InvertedBottleneck
"""
def __init__(self, in_channels, out_channels, kernel_size, stride, t_factor, padding=0, bias=True):
super(InvertedBottleneck, self).__init__()
mid_channels = t_factor*in_channels
self.layers = nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=mid_channels, kernel_size=1, bias=bias),
nn.BatchNorm2d(num_features=mid_channels),
nn.ReLU(),
nn.Conv2d(in_channels=mid_channels, out_channels=mid_channels, kernel_size=kernel_size, stride=stride,
padding=padding, bias=bias),
nn.BatchNorm2d(num_features=mid_channels),
nn.ReLU(),
nn.Conv2d(in_channels=mid_channels, out_channels=out_channels, kernel_size=1, bias=bias)
)
def forward(self, inputs):
outputs = self.layers(inputs)
return outputs
class Flatten(nn.Module):
"""
将三维张量拉平的网络层
(n,c,h,w) -> (n, c*h*w)
"""
def __init__(self):
super(Flatten, self).__init__()
def forward(self, x):
n_samples = x.shape[0]
x = x.reshape(n_samples, -1)
return x
def calculate_iou(bbox1, bbox2):
"""计算bbox1=(x1,y1,x2,y2)和bbox2=(x3,y3,x4,y4)两个bbox的iou"""
if bbox1[2]<=bbox1[0] or bbox1[3]<=bbox1[1] or bbox2[2]<=bbox2[0] or bbox2[3]<=bbox2[1]:
return 0 # 如果bbox1或bbox2没有面积,或者输入错误,直接返回0
intersect_bbox = [0., 0., 0., 0.] # bbox1和bbox2的重合区域的(x1,y1,x2,y2)
intersect_bbox[0] = max(bbox1[0],bbox2[0])
intersect_bbox[1] = max(bbox1[1],bbox2[1])
intersect_bbox[2] = min(bbox1[2],bbox2[2])
intersect_bbox[3] = min(bbox1[3],bbox2[3])
w = max(intersect_bbox[2] - intersect_bbox[0], 0)
h = max(intersect_bbox[3] - intersect_bbox[1], 0)
area1 = (bbox1[2] - bbox1[0]) * (bbox1[3] - bbox1[1]) # bbox1面积
area2 = (bbox2[2] - bbox2[0]) * (bbox2[3] - bbox2[1]) # bbox2面积
area_intersect = w * h # 交集面积
iou = area_intersect / (area1 + area2 - area_intersect + 1e-6) # 防止除0
# print(bbox1,bbox2)
# print(intersect_bbox)
# input()
return iou
# 注意检查一下输入数据的格式,到底是xywh还是xyxy
def labels2bbox(matrix):
"""
将网络输出的7*7*30的数据转换为bbox的(98,25)的格式,然后再将NMS处理后的结果返回
:param matrix: 注意,输入的数据中,bbox坐标的格式是(px,py,w,h),需要转换为(x1,y1,x2,y2)的格式再输入NMS
:return: 返回NMS处理后的结果,bboxes.shape = (-1, 6), 0:4是(x1,y1,x2,y2), 4是conf, 5是cls
"""
if matrix.size()[0:2]!=(7,7):
raise ValueError("Error: Wrong labels size: ", matrix.size(), " != (7,7)")
matrix = matrix.numpy()
bboxes = np.zeros((98, 6))
# 先把7*7*30的数据转变为bbox的(98,25)的格式,其中,bbox信息格式从(px,py,w,h)转换为(x1,y1,x2,y2),方便计算iou
matrix = matrix.reshape(49,-1)
bbox = matrix[:, :10].reshape(98, 5)
r_grid = np.array(list(range(7)))
r_grid = np.repeat(r_grid, repeats=14, axis=0) # [0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 ...]
c_grid = np.array(list(range(7)))
c_grid = np.repeat(c_grid, repeats=2, axis=0)[np.newaxis, :]
c_grid = np.repeat(c_grid, repeats=7, axis=0).reshape(-1) # [0 0 1 1 2 2 3 3 4 4 5 5 6 6 0 0 1 1 2 2 3 3 4 4 5 5 6 6...]
bboxes[:, 0] = np.maximum((bbox[:, 0] + c_grid) / 7.0 - bbox[:, 2] / 2.0, 0)
bboxes[:, 1] = np.maximum((bbox[:, 1] + r_grid) / 7.0 - bbox[:, 3] / 2.0, 0)
bboxes[:, 2] = np.minimum((bbox[:, 0] + c_grid) / 7.0 + bbox[:, 2] / 2.0, 1)
bboxes[:, 3] = np.minimum((bbox[:, 1] + r_grid) / 7.0 + bbox[:, 3] / 2.0, 1)
bboxes[:, 4] = bbox[:, 4]
cls = np.argmax(matrix[:, 10:], axis=1)
cls = np.repeat(cls, repeats=2, axis=0)
bboxes[:, 5] = cls
# 对所有98个bbox执行NMS算法,清理cls-specific confidence score较低以及iou重合度过高的bbox
keepid = nms_multi_cls(bboxes, thresh=0.1, n_cls=20)
ids = []
for x in keepid:
ids = ids + list(x)
ids = sorted(ids)
return bboxes[ids, :]
def nms_1cls(dets, thresh):
"""
单类别NMS
:param dets: ndarray,nx5,dets[i,0:4]分别是bbox坐标;dets[i,4]是置信度score
:param thresh: NMS算法设置的iou阈值
"""
# 从检测结果dets中获得x1,y1,x2,y2和scores的值
x1 = dets[:, 0]
y1 = dets[:, 1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
# 计算每个检测框的面积
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
# 按照置信度score的值降序排序的下标序列
order = scores.argsort()[::-1]
# keep用来保存最后保留的检测框的下标
keep = []
while order.size > 0:
# 当前置信度最高bbox的index
i = order[0]
# 添加当前剩余检测框中得分最高的index到keep中
keep.append(i)
# 得到此bbox和剩余其他bbox的相交区域,左上角和右下角
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
# 计算相交的面积,不重叠时面积为0
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
# 计算IoU:重叠面积/(面积1+面积2-重叠面积)
iou = inter / (areas[i] + areas[order[1:]] - inter)
# 保留IoU小于阈值的bbox
inds = np.where(iou <= thresh)[0]
order = order[inds+1]
return keep
def nms_multi_cls(dets, thresh, n_cls):
"""
多类别的NMS算法
:param dets:ndarray,nx6,dets[i,0:4]是bbox坐标;dets[i,4]是置信度score;dets[i,5]是类别序号;
:param thresh: NMS算法的阈值;
:param n_cls: 是类别总数
"""
# 储存结果的列表,keeps_index[i]表示第i类保留下来的bbox下标list
keeps_index = []
for i in range(n_cls):
order_i = np.where(dets[:,5]==i)[0]
det = dets[dets[:, 5] == i, 0:5]
if det.shape[0] == 0:
keeps_index.append([])
continue
keep = nms_1cls(det, thresh)
keeps_index.append(order_i[keep])
return keeps_index
if __name__ == '__main__':
a = torch.randn((7,7,30))
print(a)
labels2bbox(a)
该函数首先将labels转换为(98,6)格式,其中前四个表示坐标,第五个表示置信度,第六个表示类别。然后执行NMS算法去掉重叠较高的边界框。
test.py
import os
from my_arguments import Args
import torch
from torch.utils.data import DataLoader
from model import MyNet
from data import MyDataset
from util import labels2bbox
from prepare_data import GL_CLASSES
import torchvision.transforms as transforms
from PIL import Image
import cv2
COLOR = [(255,0,0),(255,125,0),(255,255,0),(255,0,125),(255,0,250),
(255,125,125),(255,125,250),(125,125,0),(0,255,125),(255,0,0),
(0,0,255),(125,0,255),(0,125,255),(0,255,255),(125,125,255),
(0,255,0),(125,255,125),(255,255,255),(100,100,100),(0,0,0),] # 用来标识20个类别的bbox颜色,可自行设定
class TestInterface(object):
"""
网络测试接口,
main(): 网络测试主函数
"""
def __init__(self, opts):
self.opts = opts
print("=======================Start inferring.=======================")
def main(self):
"""
具体测试流程根据不同项目有较大区别,需要自行编写代码,主要流程如下:
1. 获取命令行参数
2. 获取测试集
3. 加载网络模型
4. 用网络模型对测试集进行测试,得到测试结果
5. 根据不同项目,计算测试集的评价指标, 或者可视化测试结果
"""
opts = self.opts
img_list = os.listdir(opts.dataset_dir)
trans = transforms.Compose([
# transforms.Resize((112, 112)),
transforms.ToTensor(),
])
model = torch.load(opts.weight_path)
if opts.use_GPU:
model.to(opts.GPU_id)
for img_name in img_list:
img_path = os.path.join(opts.dataset_dir, img_name)
img = Image.open(img_path).convert('RGB')
img = trans(img)
img = torch.unsqueeze(img, dim=0)
print(img_name, img.shape)
if opts.use_GPU:
img = img.to(opts.GPU_id)
preds = torch.squeeze(model(img), dim=0).detach().cpu()
preds = preds.permute(1,2,0)
bbox = labels2bbox(preds)
draw_img = cv2.imread(img_path)
self.draw_bbox(draw_img, bbox)
def draw_bbox(self, img, bbox):
"""
根据bbox的信息在图像上绘制bounding box
:param img: 绘制bbox的图像
:param bbox: 是(n,6)的尺寸,0:4是(x1,y1,x2,y2), 4是conf, 5是cls
"""
h, w = img.shape[0:2]
n = bbox.shape[0]
for i in range(n):
confidence = bbox[i, 4]
if confidence<0.2:
continue
p1 = (int(w * bbox[i, 0]), int(h * bbox[i, 1]))
p2 = (int(w * bbox[i, 2]), int(h * bbox[i, 3]))
cls_name = GL_CLASSES[int(bbox[i, 5])]
print(cls_name, p1, p2)
cv2.rectangle(img, p1, p2, COLOR[int(bbox[i, 5])])
cv2.putText(img, cls_name, p1, cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255))
cv2.putText(img, str(confidence), (p1[0],p1[1]-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255))
cv2.imshow("bbox", img)
cv2.waitKey(0)
if __name__ == '__main__':
# 网络测试代码
args = Args()
args.set_test_args() # 获取命令行参数
test_interface = TestInterface(args.get_opts())
test_interface.main() # 调用测试接口参考文献:
睿智的目标检测5——yolo1、yolo2、yolo3和SSD的网络结构汇总对比_睿智的网络csdn_Bubbliiiing的博客-CSDN博客
【YOLO系列】YOLOv1论文超详细解读(翻译 +学习笔记)_路人贾'ω'的博客-CSDN博客
YOLOV2
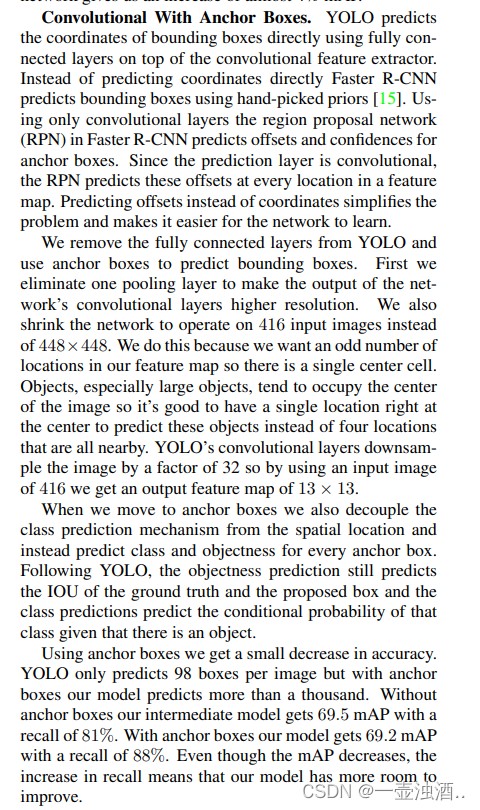
YOLOv1: 使用全连接层来直接预测边界框(x,y,w,h,c)其中边界框的坐标是相对于cell的,宽与高是相对于整张图片。由于各个图片中存在不同尺度和长宽比的物体,YOLOv1在训练过程中学习适应不同物体的形状是比较困难的,这也导致YOLOv1在精确定位方面表现较差。
Faster R-CNN: 不是直接预测目标边界框,而是使用手工挑选的先验Anchor Boxes。利用RPN预测的边界框是相对于Anchor Boxes的坐标和高宽的偏移offset。RPN在特征图的每个位置预测Anchor Box偏移量而不是坐标,简化了问题,使网络更容易学习。
Anchor Box的构成
- 使用CNN提取的Feature Map的点,来定位目标的位置。
- 使用Anchor Box的Scale来表示目标的大小。
- 使用Anchor Box的Aspect Ratio来表示目标的形状。
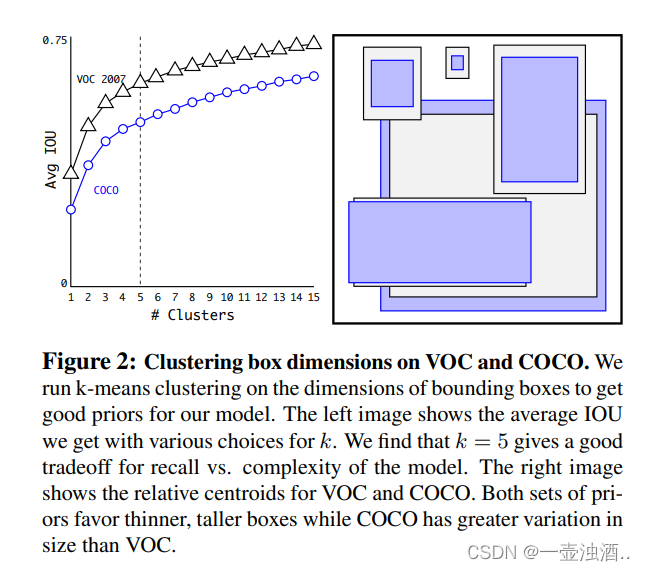
使用Kmean聚类来自动找到更好的boxes。
RPN网络的位置预测
方法: 预测相对于Anchor Box的坐标的偏移,和相对于Anchor Box高宽的偏移。
计算公式: 预测框中心坐标= 输出的偏移量×Anchor宽高+Anchor中心坐标
YOLOv2的改进
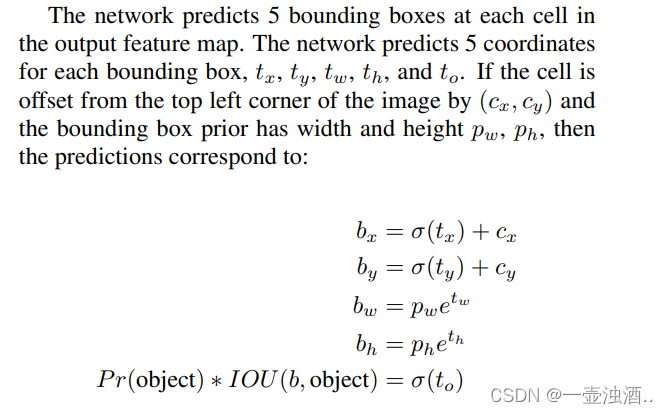
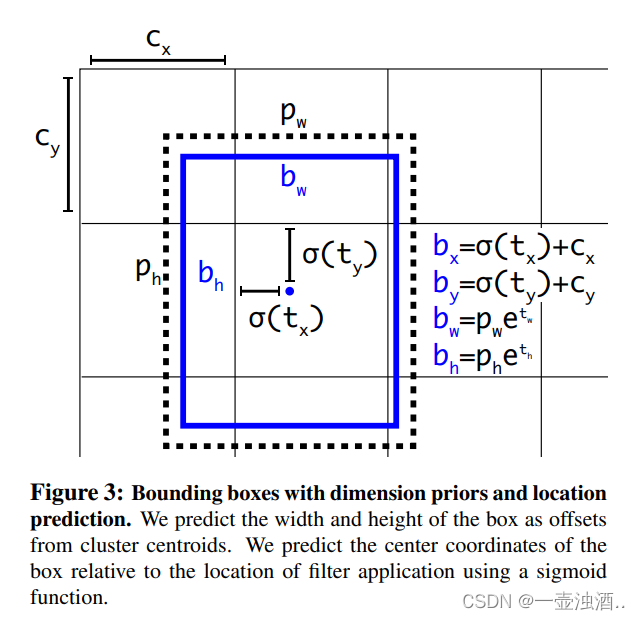
方法: 预测边界框中心点相对于对应cell左上角位置的相对偏移值。将网格归一化为1×1,坐标控制在每个网格内,同时配合sigmod函数将预测值转换到0~1之间的办法,做到每一个Anchor只负责检测周围正负一个单位以内的目标box。计算公式: 一个网格相对于图片左上角的偏移量是cx,cy。先验框的宽度和高度分别是pw和ph,则预测的边界框相对于特征图的中心坐标(bx,by)和宽高bw、bh
代码
voc0712.py
读取voc图片和注释,其中注释的格式是(x,y,w,h,cls)
"""VOC Dataset Classes
Original author: Francisco Massa
https://github.com/fmassa/vision/blob/voc_dataset/torchvision/datasets/voc.py
Updated by: Ellis Brown, Max deGroot
"""
import os
import os.path as osp
import sys
import torch
import torch.utils.data as data
import cv2
import numpy as np
import random
import xml.etree.ElementTree as ET
VOC_CLASSES = ( # always index 0
'aeroplane', 'bicycle', 'bird', 'boat',
'bottle', 'bus', 'car', 'cat', 'chair',
'cow', 'diningtable', 'dog', 'horse',
'motorbike', 'person', 'pottedplant',
'sheep', 'sofa', 'train', 'tvmonitor')
class VOCAnnotationTransform(object):
"""Transforms a VOC annotation into a Tensor of bbox coords and label index
Initilized with a dictionary lookup of classnames to indexes
Arguments:
class_to_ind (dict, optional): dictionary lookup of classnames -> indexes
(default: alphabetic indexing of VOC's 20 classes)
keep_difficult (bool, optional): keep difficult instances or not
(default: False)
height (int): height
width (int): width
"""
def __init__(self, class_to_ind=None, keep_difficult=False):
self.class_to_ind = class_to_ind or dict(
zip(VOC_CLASSES, range(len(VOC_CLASSES))))
self.keep_difficult = keep_difficult
def __call__(self, target, width, height):
"""
Arguments:
target (annotation) : the target annotation to be made usable
will be an ET.Element
Returns:
a list containing lists of bounding boxes [bbox coords, class name]
"""
res = []
for obj in target.iter('object'):
difficult = int(obj.find('difficult').text) == 1
if not self.keep_difficult and difficult:
continue
name = obj.find('name').text.lower().strip()
bbox = obj.find('bndbox')
pts = ['xmin', 'ymin', 'xmax', 'ymax']
bndbox = []
for i, pt in enumerate(pts):
cur_pt = int(bbox.find(pt).text) - 1
# scale height or width
cur_pt = cur_pt / width if i % 2 == 0 else cur_pt / height
bndbox.append(cur_pt)
label_idx = self.class_to_ind[name]
bndbox.append(label_idx)
res += [bndbox] # [xmin, ymin, xmax, ymax, label_ind]
# img_id = target.find('filename').text[:-4]
return res # [[xmin, ymin, xmax, ymax, label_ind], ... ]
class VOCDetection(data.Dataset):
"""VOC Detection Dataset Object
input is image, target is annotation
Arguments:
root (string): filepath to VOCdevkit folder.
image_set (string): imageset to use (eg. 'train', 'val', 'test')
transform (callable, optional): transformation to perform on the
input image
target_transform (callable, optional): transformation to perform on the
target `annotation`
(eg: take in caption string, return tensor of word indices)
dataset_name (string, optional): which dataset to load
(default: 'VOC2007')
"""
def __init__(self,
data_dir=None,
image_sets=[('2007', 'trainval')],
transform=None,
target_transform=VOCAnnotationTransform(),
dataset_name='VOC0712'):
self.root = data_dir
self.image_set = image_sets
self.transform = transform
self.target_transform = target_transform
self.name = dataset_name
self.annopath = osp.join('%s', 'Annotations', '%s.xml')
self.imgpath = osp.join('%s', 'JPEGImages', '%s.jpg')
self.ids = list()
for (year, name) in image_sets:
rootpath = osp.join(self.root, 'VOC' + year)
for line in os.listdir(os.path.join(rootpath,'JPEGImages')):
line=line.split('.')[0]
self.ids.append((rootpath,line))
# for line in open(osp.join(rootpath, 'ImageSets', 'Main', name + '.txt')):
# self.ids.append((rootpath, line.strip()))
def __getitem__(self, index):
index=index%len(self.ids)
im, gt, h, w = self.pull_item(index)
return im, gt
def __len__(self):
return len(self.ids)
def pull_item(self, index):
# load an image
index=index%len(self.ids)
img_id = self.ids[index]
img = cv2.imread(self.imgpath % img_id)
height, width, channels = img.shape
# load a target
target = ET.parse(self.annopath % img_id).getroot()
if self.target_transform is not None:
target = self.target_transform(target, width, height)
# check target
if len(target) == 0:
target = np.zeros([1, 5])
else:
target = np.array(target)
# transform
if self.transform is not None:
img, boxes, labels = self.transform(img, target[:, :4], target[:, 4])
# to rgb
img = img[:, :, (2, 1, 0)]
# to tensor
img = torch.from_numpy(img).permute(2, 0, 1).float()
# target
target = np.hstack((boxes, np.expand_dims(labels, axis=1)))
return img, target, height, width
def pull_image(self, index):
'''Returns the original image object at index in PIL form
Note: not using self.__getitem__(), as any transformations passed in
could mess up this functionality.
Argument:
index (int): index of img to show
Return:
PIL img
'''
img_id = self.ids[index]
return cv2.imread(self.imgpath % img_id, cv2.IMREAD_COLOR), img_id
def pull_anno(self, index):
'''Returns the original annotation of image at index
Note: not using self.__getitem__(), as any transformations passed in
could mess up this functionality.
Argument:
index (int): index of img to get annotation of
Return:
list: [img_id, [(label, bbox coords),...]]
eg: ('001718', [('dog', (96, 13, 438, 332))])
'''
img_id = self.ids[index]
anno = ET.parse(self.annopath % img_id).getroot()
gt = self.target_transform(anno, 1, 1)
return img_id[1], gt
def pull_tensor(self, index):
'''Returns the original image at an index in tensor form
Note: not using self.__getitem__(), as any transformations passed in
could mess up this functionality.
Argument:
index (int): index of img to show
Return:
tensorized version of img, squeezed
'''
return torch.Tensor(self.pull_image(index)).unsqueeze_(0)
if __name__ == "__main__":
def base_transform(image, size, mean):
x = cv2.resize(image, (size, size)).astype(np.float32)
x -= mean
x = x.astype(np.float32)
return x
class BaseTransform:
def __init__(self, size, mean):
self.size = size
self.mean = np.array(mean, dtype=np.float32)
def __call__(self, image, boxes=None, labels=None):
return base_transform(image, self.size, self.mean), boxes, labels
img_size = 640
# dataset
dataset = VOCDetection(data_dir='../VOCdevkit/',
image_sets=[('2007', 'trainval')],
transform=BaseTransform(img_size, (0, 0, 0)))
for i in range(1000):
# im, gt, h, w = dataset.pull_item(i)
im,gt=dataset[i]
img = im.permute(1,2,0).numpy()[:, :, (2, 1, 0)].astype(np.uint8)
img = img.copy()
for box in gt:
xmin, ymin, xmax, ymax, _ = box
xmin *= img_size
ymin *= img_size
xmax *= img_size
ymax *= img_size
img = cv2.rectangle(img, (int(xmin), int(ymin)), (int(xmax), int(ymax)), (0,0,255), 2)
cv2.imshow('gt', img)
cv2.waitKey(0)
tools.py
import numpy as np
from data import *
import torch.nn as nn
import torch.nn.functional as F
# We use ignore thresh to decide which anchor box can be kept.
ignore_thresh = 0.5
class MSEWithLogitsLoss(nn.Module):
def __init__(self, reduction='mean'):
super(MSEWithLogitsLoss, self).__init__()
self.reduction = reduction
def forward(self, logits, targets, mask):
inputs = torch.sigmoid(logits)
# We ignore those whose tarhets == -1.0.
pos_id = (mask==1.0).float()
neg_id = (mask==0.0).float()
pos_loss = pos_id * (inputs - targets)**2
neg_loss = neg_id * (inputs)**2
loss = 5.0*pos_loss + 1.0*neg_loss
if self.reduction == 'mean':
batch_size = logits.size(0)
loss = torch.sum(loss) / batch_size
return loss
else:
return loss
def compute_iou(anchor_boxes, gt_box):
"""
Input:
anchor_boxes : ndarray -> [[c_x_s, c_y_s, anchor_w, anchor_h], ..., [c_x_s, c_y_s, anchor_w, anchor_h]].
gt_box : ndarray -> [c_x_s, c_y_s, anchor_w, anchor_h].
Output:
iou : ndarray -> [iou_1, iou_2, ..., iou_m], and m is equal to the number of anchor boxes.
"""
# compute the iou between anchor box and gt box
# First, change [c_x_s, c_y_s, anchor_w, anchor_h] -> [xmin, ymin, xmax, ymax]
# anchor box :
ab_x1y1_x2y2 = np.zeros([len(anchor_boxes), 4])
ab_x1y1_x2y2[:, 0] = anchor_boxes[:, 0] - anchor_boxes[:, 2] / 2 # xmin
ab_x1y1_x2y2[:, 1] = anchor_boxes[:, 1] - anchor_boxes[:, 3] / 2 # ymin
ab_x1y1_x2y2[:, 2] = anchor_boxes[:, 0] + anchor_boxes[:, 2] / 2 # xmax
ab_x1y1_x2y2[:, 3] = anchor_boxes[:, 1] + anchor_boxes[:, 3] / 2 # ymax
w_ab, h_ab = anchor_boxes[:, 2], anchor_boxes[:, 3]
# gt_box :
# We need to expand gt_box(ndarray) to the shape of anchor_boxes(ndarray), in order to compute IoU easily.
gt_box_expand = np.repeat(gt_box, len(anchor_boxes), axis=0)
gb_x1y1_x2y2 = np.zeros([len(anchor_boxes), 4])
gb_x1y1_x2y2[:, 0] = gt_box_expand[:, 0] - gt_box_expand[:, 2] / 2 # xmin
gb_x1y1_x2y2[:, 1] = gt_box_expand[:, 1] - gt_box_expand[:, 3] / 2 # ymin
gb_x1y1_x2y2[:, 2] = gt_box_expand[:, 0] + gt_box_expand[:, 2] / 2 # xmax
gb_x1y1_x2y2[:, 3] = gt_box_expand[:, 1] + gt_box_expand[:, 3] / 2 # ymin
w_gt, h_gt = gt_box_expand[:, 2], gt_box_expand[:, 3]
# Then we compute IoU between anchor_box and gt_box
S_gt = w_gt * h_gt
S_ab = w_ab * h_ab
I_w = np.minimum(gb_x1y1_x2y2[:, 2], ab_x1y1_x2y2[:, 2]) - np.maximum(gb_x1y1_x2y2[:, 0], ab_x1y1_x2y2[:, 0])
I_h = np.minimum(gb_x1y1_x2y2[:, 3], ab_x1y1_x2y2[:, 3]) - np.maximum(gb_x1y1_x2y2[:, 1], ab_x1y1_x2y2[:, 1])
S_I = I_h * I_w
U = S_gt + S_ab - S_I + 1e-20
IoU = S_I / U
return IoU
def set_anchors(anchor_size):
"""
Input:
anchor_size : list -> [[h_1, w_1], [h_2, w_2], ..., [h_n, w_n]].
Output:
anchor_boxes : ndarray -> [[0, 0, anchor_w, anchor_h],
[0, 0, anchor_w, anchor_h],
...
[0, 0, anchor_w, anchor_h]].
"""
anchor_number = len(anchor_size)
anchor_boxes = np.zeros([anchor_number, 4])
for index, size in enumerate(anchor_size):
anchor_w, anchor_h = size
anchor_boxes[index] = np.array([0, 0, anchor_w, anchor_h])
return anchor_boxes
def generate_txtytwth(gt_label, w, h, s, all_anchor_size):
xmin, ymin, xmax, ymax = gt_label[:-1]
# compute the center, width and height
c_x = (xmax + xmin) / 2 * w
c_y = (ymax + ymin) / 2 * h
box_w = (xmax - xmin) * w
box_h = (ymax - ymin) * h
if box_w < 1. or box_h < 1.:
# print('A dirty data !!!')
return False
# map the center, width and height to the feature map size
c_x_s = c_x / s
c_y_s = c_y / s
box_ws = box_w / s
box_hs = box_h / s
# the grid cell location
grid_x = int(c_x_s)
grid_y = int(c_y_s)
# generate anchor boxes
anchor_boxes = set_anchors(all_anchor_size)
gt_box = np.array([[0, 0, box_ws, box_hs]])
# compute the IoU
iou = compute_iou(anchor_boxes, gt_box)
# We consider those anchor boxes whose IoU is more than ignore thresh,
iou_mask = (iou > ignore_thresh)
result = []
if iou_mask.sum() == 0:
# We assign the anchor box with highest IoU score.
index = np.argmax(iou)
p_w, p_h = all_anchor_size[index]
tx = c_x_s - grid_x
ty = c_y_s - grid_y
tw = np.log(box_ws / p_w)
th = np.log(box_hs / p_h)
weight = 2.0 - (box_w / w) * (box_h / h)
result.append([index, grid_x, grid_y, tx, ty, tw, th, weight, xmin, ymin, xmax, ymax])
return result
else:
# There are more than one anchor boxes whose IoU are higher than ignore thresh.
# But we only assign only one anchor box whose IoU is the best(objectness target is 1) and ignore other
# anchor boxes whose(we set their objectness as -1 which means we will ignore them during computing obj loss )
# iou_ = iou * iou_mask
# We get the index of the best IoU
best_index = np.argmax(iou)
for index, iou_m in enumerate(iou_mask):
if iou_m:
if index == best_index:
p_w, p_h = all_anchor_size[index]
tx = c_x_s - grid_x
ty = c_y_s - grid_y
tw = np.log(box_ws / p_w)
th = np.log(box_hs / p_h)
weight = 2.0 - (box_w / w) * (box_h / h)
result.append([index, grid_x, grid_y, tx, ty, tw, th, weight, xmin, ymin, xmax, ymax])
else:
# we ignore other anchor boxes even if their iou scores all higher than ignore thresh
result.append([index, grid_x, grid_y, 0., 0., 0., 0., -1.0, 0., 0., 0., 0.])
return result
def gt_creator(input_size, stride, label_lists, anchor_size):
"""
Input:
input_size : list -> the size of image in the training stage.
stride : int or list -> the downSample of the CNN, such as 32, 64 and so on.
label_list : list -> [[[xmin, ymin, xmax, ymax, cls_ind], ... ], [[xmin, ymin, xmax, ymax, cls_ind], ... ]],
and len(label_list) = batch_size;
len(label_list[i]) = the number of class instance in a image;
(xmin, ymin, xmax, ymax) : the coords of a bbox whose valus is between 0 and 1;
cls_ind : the corresponding class label.
Output:
gt_tensor : ndarray -> shape = [batch_size, anchor_number, 1+1+4, grid_cell number ]
"""
# prepare the all empty gt datas
batch_size = len(label_lists)
h = w = input_size
# We make gt labels by anchor-free method and anchor-based method.
ws = w // stride
hs = h // stride
s = stride
# We use anchor boxes to build training target.
all_anchor_size = anchor_size
anchor_number = len(all_anchor_size)
gt_tensor = np.zeros([batch_size, hs, ws, anchor_number, 1+1+4+1+4])
for batch_index in range(batch_size):
for gt_label in label_lists[batch_index]:
# get a bbox coords
gt_class = int(gt_label[-1])
results = generate_txtytwth(gt_label, w, h, s, all_anchor_size)
if results:
for result in results:
index, grid_x, grid_y, tx, ty, tw, th, weight, xmin, ymin, xmax, ymax = result
if weight > 0.:
if grid_y < gt_tensor.shape[1] and grid_x < gt_tensor.shape[2]:
gt_tensor[batch_index, grid_y, grid_x, index, 0] = 1.0
gt_tensor[batch_index, grid_y, grid_x, index, 1] = gt_class
gt_tensor[batch_index, grid_y, grid_x, index, 2:6] = np.array([tx, ty, tw, th])
gt_tensor[batch_index, grid_y, grid_x, index, 6] = weight
gt_tensor[batch_index, grid_y, grid_x, index, 7:] = np.array([xmin, ymin, xmax, ymax])
else:
gt_tensor[batch_index, grid_y, grid_x, index, 0] = -1.0
gt_tensor[batch_index, grid_y, grid_x, index, 6] = -1.0
gt_tensor = gt_tensor.reshape(batch_size, hs * ws * anchor_number, 1+1+4+1+4)
return gt_tensor
def multi_gt_creator(input_size, strides, label_lists, anchor_size):
"""creator multi scales gt"""
# prepare the all empty gt datas
batch_size = len(label_lists)
h = w = input_size
num_scale = len(strides)
gt_tensor = []
all_anchor_size = anchor_size
anchor_number = len(all_anchor_size) // num_scale
for s in strides:
gt_tensor.append(np.zeros([batch_size, h//s, w//s, anchor_number, 1+1+4+1+4]))
# generate gt datas
for batch_index in range(batch_size):
for gt_label in label_lists[batch_index]:
# get a bbox coords
gt_class = int(gt_label[-1])
xmin, ymin, xmax, ymax = gt_label[:-1]
# compute the center, width and height
c_x = (xmax + xmin) / 2 * w
c_y = (ymax + ymin) / 2 * h
box_w = (xmax - xmin) * w
box_h = (ymax - ymin) * h
if box_w < 1. or box_h < 1.:
# print('A dirty data !!!')
continue
# compute the IoU
anchor_boxes = set_anchors(all_anchor_size)
gt_box = np.array([[0, 0, box_w, box_h]])
iou = compute_iou(anchor_boxes, gt_box)
# We only consider those anchor boxes whose IoU is more than ignore thresh,
iou_mask = (iou > ignore_thresh)
if iou_mask.sum() == 0:
# We assign the anchor box with highest IoU score.
index = np.argmax(iou)
# s_indx, ab_ind = index // num_scale, index % num_scale
s_indx = index // anchor_number
ab_ind = index - s_indx * anchor_number
# get the corresponding stride
s = strides[s_indx]
# get the corresponding anchor box
p_w, p_h = anchor_boxes[index, 2], anchor_boxes[index, 3]
# compute the gride cell location
c_x_s = c_x / s
c_y_s = c_y / s
grid_x = int(c_x_s)
grid_y = int(c_y_s)
# compute gt labels
tx = c_x_s - grid_x
ty = c_y_s - grid_y
tw = np.log(box_w / p_w)
th = np.log(box_h / p_h)
weight = 2.0 - (box_w / w) * (box_h / h)
if grid_y < gt_tensor[s_indx].shape[1] and grid_x < gt_tensor[s_indx].shape[2]:
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 0] = 1.0
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 1] = gt_class
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 2:6] = np.array([tx, ty, tw, th])
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 6] = weight
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 7:] = np.array([xmin, ymin, xmax, ymax])
else:
# There are more than one anchor boxes whose IoU are higher than ignore thresh.
# But we only assign only one anchor box whose IoU is the best(objectness target is 1) and ignore other
# anchor boxes whose(we set their objectness as -1 which means we will ignore them during computing obj loss )
# iou_ = iou * iou_mask
# We get the index of the best IoU
best_index = np.argmax(iou)
for index, iou_m in enumerate(iou_mask):
if iou_m:
if index == best_index:
# s_indx, ab_ind = index // num_scale, index % num_scale
s_indx = index // anchor_number
ab_ind = index - s_indx * anchor_number
# get the corresponding stride
s = strides[s_indx]
# get the corresponding anchor box
p_w, p_h = anchor_boxes[index, 2], anchor_boxes[index, 3]
# compute the gride cell location
c_x_s = c_x / s
c_y_s = c_y / s
grid_x = int(c_x_s)
grid_y = int(c_y_s)
# compute gt labels
tx = c_x_s - grid_x
ty = c_y_s - grid_y
tw = np.log(box_w / p_w)
th = np.log(box_h / p_h)
weight = 2.0 - (box_w / w) * (box_h / h)
if grid_y < gt_tensor[s_indx].shape[1] and grid_x < gt_tensor[s_indx].shape[2]:
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 0] = 1.0
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 1] = gt_class
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 2:6] = np.array([tx, ty, tw, th])
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 6] = weight
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 7:] = np.array([xmin, ymin, xmax, ymax])
else:
# we ignore other anchor boxes even if their iou scores are higher than ignore thresh
# s_indx, ab_ind = index // num_scale, index % num_scale
s_indx = index // anchor_number
ab_ind = index - s_indx * anchor_number
s = strides[s_indx]
c_x_s = c_x / s
c_y_s = c_y / s
grid_x = int(c_x_s)
grid_y = int(c_y_s)
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 0] = -1.0
gt_tensor[s_indx][batch_index, grid_y, grid_x, ab_ind, 6] = -1.0
gt_tensor = [gt.reshape(batch_size, -1, 1+1+4+1+4) for gt in gt_tensor]
gt_tensor = np.concatenate(gt_tensor, 1)
return gt_tensor
def iou_score(bboxes_a, bboxes_b):
"""
bbox_1 : [B*N, 4] = [x1, y1, x2, y2]
bbox_2 : [B*N, 4] = [x1, y1, x2, y2]
"""
tl = torch.max(bboxes_a[:, :2], bboxes_b[:, :2])
br = torch.min(bboxes_a[:, 2:], bboxes_b[:, 2:])
area_a = torch.prod(bboxes_a[:, 2:] - bboxes_a[:, :2], 1)
area_b = torch.prod(bboxes_b[:, 2:] - bboxes_b[:, :2], 1)
en = (tl < br).type(tl.type()).prod(dim=1)
area_i = torch.prod(br - tl, 1) * en # * ((tl < br).all())
return area_i / (area_a + area_b - area_i + 1e-14)
def loss(pred_conf, pred_cls, pred_txtytwth, pred_iou, label):
# loss func
conf_loss_function = MSEWithLogitsLoss(reduction='mean')
cls_loss_function = nn.CrossEntropyLoss(reduction='none')
txty_loss_function = nn.BCEWithLogitsLoss(reduction='none')
twth_loss_function = nn.MSELoss(reduction='none')
iou_loss_function = nn.SmoothL1Loss(reduction='none')
# pred
pred_conf = pred_conf[:, :, 0]
pred_cls = pred_cls.permute(0, 2, 1)
pred_txty = pred_txtytwth[:, :, :2]
pred_twth = pred_txtytwth[:, :, 2:]
pred_iou = pred_iou[:, :, 0]
# gt
gt_conf = label[:, :, 0].float()
gt_obj = label[:, :, 1].float()
gt_cls = label[:, :, 2].long()
gt_txty = label[:, :, 3:5].float()
gt_twth = label[:, :, 5:7].float()
gt_box_scale_weight = label[:, :, 7].float()
gt_iou = (gt_box_scale_weight > 0.).float()
gt_mask = (gt_box_scale_weight > 0.).float()
batch_size = pred_conf.size(0)
# objectness loss
conf_loss = conf_loss_function(pred_conf, gt_conf, gt_obj)
# class loss
cls_loss = torch.sum(cls_loss_function(pred_cls, gt_cls) * gt_mask) / batch_size
# box loss
txty_loss = torch.sum(torch.sum(txty_loss_function(pred_txty, gt_txty), dim=-1) * gt_box_scale_weight * gt_mask) / batch_size
twth_loss = torch.sum(torch.sum(twth_loss_function(pred_twth, gt_twth), dim=-1) * gt_box_scale_weight * gt_mask) / batch_size
bbox_loss = txty_loss + twth_loss
# iou loss
iou_loss = torch.sum(iou_loss_function(pred_iou, gt_iou) * gt_mask) / batch_size
return conf_loss, cls_loss, bbox_loss, iou_loss
if __name__ == "__main__":
gt_box = np.array([[0.0, 0.0, 10, 10]])
anchor_boxes = np.array([[0.0, 0.0, 10, 10],
[0.0, 0.0, 4, 4],
[0.0, 0.0, 8, 8],
[0.0, 0.0, 16, 16]
])
iou = compute_iou(anchor_boxes, gt_box)
print(iou)train.py
from __future__ import division
import os
import random
import argparse
import time
import cv2
import numpy as np
from copy import deepcopy
import torch
import torch.optim as optim
import torch.backends.cudnn as cudnn
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
from data.voc0712 import VOCDetection
from data.coco2017 import COCODataset
from data import config
from data import BaseTransform, detection_collate
import tools
from utils import distributed_utils
from utils.com_paras_flops import FLOPs_and_Params
from utils.augmentations import SSDAugmentation, ColorAugmentation
from utils.cocoapi_evaluator import COCOAPIEvaluator
from utils.vocapi_evaluator import VOCAPIEvaluator
from utils.modules import ModelEMA
def parse_args():
parser = argparse.ArgumentParser(description='YOLO Detection')
# basic
parser.add_argument('--cuda', action='store_true', default=False,
help='use cuda.')
parser.add_argument('-bs', '--batch_size', default=16, type=int,
help='Batch size for training')
parser.add_argument('--lr', default=1e-3, type=float,
help='initial learning rate')
parser.add_argument('--wp_epoch', type=int, default=2,
help='The upper bound of warm-up')
parser.add_argument('--start_epoch', type=int, default=0,
help='start epoch to train')
parser.add_argument('-r', '--resume', default=None, type=str,
help='keep training')
parser.add_argument('--momentum', default=0.9, type=float,
help='Momentum value for optim')
parser.add_argument('--weight_decay', default=5e-4, type=float,
help='Weight decay for SGD')
parser.add_argument('--num_workers', default=8, type=int,
help='Number of workers used in dataloading')
parser.add_argument('--num_gpu', default=1, type=int,
help='Number of GPUs to train')
parser.add_argument('--eval_epoch', type=int,
default=10, help='interval between evaluations')
parser.add_argument('--tfboard', action='store_true', default=False,
help='use tensorboard')
parser.add_argument('--save_folder', default='weights/', type=str,
help='Gamma update for SGD')
parser.add_argument('--vis', action='store_true', default=False,
help='visualize target.')
# model
parser.add_argument('-v', '--version', default='yolov2_d19',
help='yolov2_d19, yolov2_r50, yolov2_slim, yolov3, yolov3_spp, yolov3_tiny')
# dataset
parser.add_argument('-root', '--data_root', default='./',
help='dataset root')
parser.add_argument('-d', '--dataset', default='voc',
help='voc or coco')
# train trick
parser.add_argument('--no_warmup', action='store_true', default=False,
help='do not use warmup')
parser.add_argument('-ms', '--multi_scale', action='store_true', default=False,
help='use multi-scale trick')
parser.add_argument('--mosaic', action='store_true', default=False,
help='use mosaic augmentation')
parser.add_argument('--ema', action='store_true', default=False,
help='use ema training trick')
# DDP train
parser.add_argument('-dist', '--distributed', action='store_true', default=False,
help='distributed training')
parser.add_argument('--dist_url', default='env://',
help='url used to set up distributed training')
parser.add_argument('--world_size', default=1, type=int,
help='number of distributed processes')
parser.add_argument('--sybn', action='store_true', default=False,
help='use sybn.')
return parser.parse_args()
def train():
args = parse_args()
print("Setting Arguments.. : ", args)
print("----------------------------------------------------------")
# set distributed
print('World size: {}'.format(distributed_utils.get_world_size()))
if args.distributed:
distributed_utils.init_distributed_mode(args)
print("git:\n {}\n".format(distributed_utils.get_sha()))
# cuda
if args.cuda:
print('use cuda')
# cudnn.benchmark = True
device = torch.device("cuda")
else:
device = torch.device("cpu")
model_name = args.version
print('Model: ', model_name)
# load model and config file
if model_name == 'yolov2_d19':
from models.yolov2_d19 import YOLOv2D19 as yolo_net
cfg = config.yolov2_d19_cfg
elif model_name == 'yolov2_r50':
from models.yolov2_r50 import YOLOv2R50 as yolo_net
cfg = config.yolov2_r50_cfg
elif model_name == 'yolov3':
from models.yolov3 import YOLOv3 as yolo_net
cfg = config.yolov3_d53_cfg
elif model_name == 'yolov3_spp':
from models.yolov3_spp import YOLOv3Spp as yolo_net
cfg = config.yolov3_d53_cfg
elif model_name == 'yolov3_tiny':
from models.yolov3_tiny import YOLOv3tiny as yolo_net
cfg = config.yolov3_tiny_cfg
else:
print('Unknown model name...')
exit(0)
# path to save model
path_to_save = os.path.join(args.save_folder, args.dataset, args.version)
os.makedirs(path_to_save, exist_ok=True)
# multi-scale
if args.multi_scale:
print('use the multi-scale trick ...')
train_size = cfg['train_size']
val_size = cfg['val_size']
else:
train_size = val_size = cfg['train_size']
# Model ENA
if args.ema:
print('use EMA trick ...')
# dataset and evaluator
if args.dataset == 'voc':
data_dir = os.path.join(args.data_root, 'VOCdevkit/')
num_classes = 20
dataset = VOCDetection(data_dir=data_dir,
transform=SSDAugmentation(train_size))
evaluator = VOCAPIEvaluator(data_root=data_dir,
img_size=val_size,
device=device,
transform=BaseTransform(val_size))
elif args.dataset == 'coco':
data_dir = os.path.join(args.data_root, 'COCO')
num_classes = 80
dataset = COCODataset(
data_dir=data_dir,
transform=SSDAugmentation(train_size))
evaluator = COCOAPIEvaluator(
data_dir=data_dir,
img_size=val_size,
device=device,
transform=BaseTransform(val_size))
else:
print('unknow dataset !! Only support voc and coco !!')
exit(0)
print('Training model on:', dataset.name)
print('The dataset size:', len(dataset))
print("----------------------------------------------------------")
# build model
anchor_size = cfg['anchor_size_voc'] if args.dataset == 'voc' else cfg['anchor_size_coco']
net = yolo_net(device=device,
input_size=train_size,
num_classes=num_classes,
trainable=True,
anchor_size=anchor_size)
model = net
model = model.to(device).train()
# SyncBatchNorm
if args.sybn and args.distributed:
print('use SyncBatchNorm ...')
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model)
# DDP
model_without_ddp = model
if args.distributed:
model = DDP(model, device_ids=[args.gpu])
model_without_ddp = model.module
# compute FLOPs and Params
if distributed_utils.is_main_process:
model_copy = deepcopy(model_without_ddp)
model_copy.trainable = False
model_copy.eval()
FLOPs_and_Params(model=model_copy,
size=train_size,
device=device)
model_copy.trainable = True
model_copy.train()
if args.distributed:
# wait for all processes to synchronize
dist.barrier()
# dataloader
batch_size = args.batch_size * distributed_utils.get_world_size()
if args.distributed and args.num_gpu > 1:
dataloader = torch.utils.data.DataLoader(
dataset=dataset,
batch_size=batch_size,
collate_fn=detection_collate,
num_workers=args.num_workers,
pin_memory=True,
drop_last=True,
sampler=torch.utils.data.distributed.DistributedSampler(dataset)
)
else:
# dataloader
dataloader = torch.utils.data.DataLoader(
dataset=dataset,
shuffle=True,
batch_size=batch_size,
collate_fn=detection_collate,
num_workers=args.num_workers,
pin_memory=True,
drop_last=True
)
# keep training
if args.resume is not None:
print('keep training model: %s' % (args.resume))
model.load_state_dict(torch.load(args.resume, map_location=device))
# EMA
ema = ModelEMA(model) if args.ema else None
# use tfboard
if args.tfboard:
print('use tensorboard')
from torch.utils.tensorboard import SummaryWriter
c_time = time.strftime('%Y-%m-%d %H:%M:%S',time.localtime(time.time()))
log_path = os.path.join('log/', args.dataset, c_time)
os.makedirs(log_path, exist_ok=True)
tblogger = SummaryWriter(log_path)
# optimizer setup
base_lr = (args.lr / 16) * batch_size
tmp_lr = base_lr
optimizer = optim.SGD(model.parameters(),
lr=base_lr,
momentum=args.momentum,
weight_decay=args.weight_decay
)
max_epoch = cfg['max_epoch']
epoch_size = len(dataloader)
best_map = -1.
warmup = not args.no_warmup
t0 = time.time()
# start training loop
for epoch in range(args.start_epoch, max_epoch):
if args.distributed:
dataloader.sampler.set_epoch(epoch)
# use step lr
if epoch in cfg['lr_epoch']:
tmp_lr = tmp_lr * 0.1
set_lr(optimizer, tmp_lr)
for iter_i, (images, targets) in enumerate(dataloader):
# WarmUp strategy for learning rate
ni = iter_i + epoch * epoch_size
# warmup
if epoch < args.wp_epoch and warmup:
nw = args.wp_epoch * epoch_size
tmp_lr = base_lr * pow(ni / nw, 4)
set_lr(optimizer, tmp_lr)
elif epoch == args.wp_epoch and iter_i == 0 and warmup:
# warmup is over
warmup = False
tmp_lr = base_lr
set_lr(optimizer, tmp_lr)
# multi-scale trick
if iter_i % 10 == 0 and iter_i > 0 and args.multi_scale:
# randomly choose a new size
r = cfg['random_size_range']
train_size = random.randint(r[0], r[1]) * 32
model.set_grid(train_size)
if args.multi_scale:
# interpolate
images = torch.nn.functional.interpolate(images, size=train_size, mode='bilinear', align_corners=False)
targets = [label.tolist() for label in targets]
# visualize labels
if args.vis:
vis_data(images, targets, train_size)
continue
# label assignment
if model_name in ['yolov2_d19', 'yolov2_r50']:
targets = tools.gt_creator(input_size=train_size,
stride=net.stride,
label_lists=targets,
anchor_size=anchor_size
)
else:
targets = tools.multi_gt_creator(input_size=train_size,
strides=net.stride,
label_lists=targets,
anchor_size=anchor_size
)
# to device
images = images.float().to(device)
targets = torch.tensor(targets).float().to(device)
# forward
conf_loss, cls_loss, box_loss, iou_loss = model(images, target=targets)
# compute loss
total_loss = conf_loss + cls_loss + box_loss + iou_loss
loss_dict = dict(conf_loss=conf_loss,
cls_loss=cls_loss,
box_loss=box_loss,
iou_loss=iou_loss,
total_loss=total_loss
)
loss_dict_reduced = distributed_utils.reduce_dict(loss_dict)
# check NAN for loss
if torch.isnan(total_loss):
print('loss is nan !!')
continue
# backprop
total_loss.backward()
optimizer.step()
optimizer.zero_grad()
# ema
if args.ema:
ema.update(model)
# display
if distributed_utils.is_main_process() and iter_i % 10 == 0:
if args.tfboard:
# viz loss
tblogger.add_scalar('conf loss', loss_dict_reduced['conf_loss'].item(), iter_i + epoch * epoch_size)
tblogger.add_scalar('cls loss', loss_dict_reduced['cls_loss'].item(), iter_i + epoch * epoch_size)
tblogger.add_scalar('box loss', loss_dict_reduced['box_loss'].item(), iter_i + epoch * epoch_size)
tblogger.add_scalar('iou loss', loss_dict_reduced['iou_loss'].item(), iter_i + epoch * epoch_size)
t1 = time.time()
cur_lr = [param_group['lr'] for param_group in optimizer.param_groups]
# basic infor
log = '[Epoch: {}/{}]'.format(epoch+1, max_epoch)
log += '[Iter: {}/{}]'.format(iter_i, epoch_size)
log += '[lr: {:.6f}]'.format(cur_lr[0])
# loss infor
for k in loss_dict_reduced.keys():
log += '[{}: {:.2f}]'.format(k, loss_dict[k])
# other infor
log += '[time: {:.2f}]'.format(t1 - t0)
log += '[size: {}]'.format(train_size)
# print log infor
print(log, flush=True)
t0 = time.time()
if distributed_utils.is_main_process():
# evaluation
if (epoch % args.eval_epoch) == 0 or (epoch == max_epoch - 1):
if args.ema:
model_eval = ema.ema
else:
model_eval = model_without_ddp
# check evaluator
if evaluator is None:
print('No evaluator ... save model and go on training.')
print('Saving state, epoch: {}'.format(epoch + 1))
weight_name = '{}_epoch_{}.pth'.format(args.version, epoch + 1)
checkpoint_path = os.path.join(path_to_save, weight_name)
torch.save(model_eval.state_dict(), checkpoint_path)
else:
print('eval ...')
# set eval mode
model_eval.trainable = False
model_eval.set_grid(val_size)
model_eval.eval()
# evaluate
evaluator.evaluate(model_eval)
cur_map = evaluator.map
if cur_map > best_map:
# update best-map
best_map = cur_map
# save model
print('Saving state, epoch:', epoch + 1)
weight_name = '{}_epoch_{}_{:.2f}.pth'.format(args.version, epoch + 1, best_map*100)
checkpoint_path = os.path.join(path_to_save, weight_name)
torch.save(model_eval.state_dict(), checkpoint_path)
if args.tfboard:
if args.dataset == 'voc':
tblogger.add_scalar('07test/mAP', evaluator.map, epoch)
elif args.dataset == 'coco':
tblogger.add_scalar('val/AP50_95', evaluator.ap50_95, epoch)
tblogger.add_scalar('val/AP50', evaluator.ap50, epoch)
# set train mode.
model_eval.trainable = True
model_eval.set_grid(train_size)
model_eval.train()
# wait for all processes to synchronize
if args.distributed:
dist.barrier()
if args.tfboard:
tblogger.close()
def set_lr(optimizer, lr):
for param_group in optimizer.param_groups:
param_group['lr'] = lr
def vis_data(images, targets, input_size):
# vis data
mean=(0.406, 0.456, 0.485)
std=(0.225, 0.224, 0.229)
mean = np.array(mean, dtype=np.float32)
std = np.array(std, dtype=np.float32)
img = images[0].permute(1, 2, 0).cpu().numpy()[:, :, ::-1]
img = ((img * std + mean)*255).astype(np.uint8)
img = img.copy()
for box in targets[0]:
xmin, ymin, xmax, ymax = box[:-1]
# print(xmin, ymin, xmax, ymax)
xmin *= input_size
ymin *= input_size
xmax *= input_size
ymax *= input_size
cv2.rectangle(img, (int(xmin), int(ymin)), (int(xmax), int(ymax)), (0, 0, 255), 2)
cv2.imshow('img', img)
cv2.waitKey(0)
if __name__ == '__main__':
train()
model.py
import numpy as np
import torch
import torch.nn as nn
from utils.modules import Conv, reorg_layer
from backbone import build_backbone
import tools
class YOLOv2D19(nn.Module):
def __init__(self, device, input_size=None, num_classes=20, trainable=False, conf_thresh=0.001, nms_thresh=0.5, anchor_size=None):
super(YOLOv2D19, self).__init__()
self.device = device
self.input_size = input_size
self.num_classes = num_classes
self.trainable = trainable
self.conf_thresh = conf_thresh
self.nms_thresh = nms_thresh
self.anchor_size = torch.tensor(anchor_size)
self.num_anchors = len(anchor_size)
self.stride = 32
self.grid_cell, self.all_anchor_wh = self.create_grid(input_size)
# backbone darknet-19
self.backbone = build_backbone(model_name='darknet19', pretrained=trainable)
# detection head
self.convsets_1 = nn.Sequential(
Conv(1024, 1024, k=3, p=1),
Conv(1024, 1024, k=3, p=1)
)
self.route_layer = Conv(512, 64, k=1)
self.reorg = reorg_layer(stride=2)
self.convsets_2 = Conv(1280, 1024, k=3, p=1)
# prediction layer
self.pred = nn.Conv2d(1024, self.num_anchors*(1 + 4 + self.num_classes), kernel_size=1)
def create_grid(self, input_size):
w, h = input_size, input_size
# generate grid cells
ws, hs = w // self.stride, h // self.stride
grid_y, grid_x = torch.meshgrid([torch.arange(hs), torch.arange(ws)])
grid_xy = torch.stack([grid_x, grid_y], dim=-1).float()
grid_xy = grid_xy.view(1, hs*ws, 1, 2).to(self.device)
# generate anchor_wh tensor
anchor_wh = self.anchor_size.repeat(hs*ws, 1, 1).unsqueeze(0).to(self.device)
return grid_xy, anchor_wh
def set_grid(self, input_size):
self.input_size = input_size
self.grid_cell, self.all_anchor_wh = self.create_grid(input_size)
def decode_xywh(self, txtytwth_pred):
"""
Input: \n
txtytwth_pred : [B, H*W, anchor_n, 4] \n
Output: \n
xywh_pred : [B, H*W*anchor_n, 4] \n
"""
B, HW, ab_n, _ = txtytwth_pred.size()
# b_x = sigmoid(tx) + gride_x
# b_y = sigmoid(ty) + gride_y
xy_pred = torch.sigmoid(txtytwth_pred[..., :2]) + self.grid_cell
# b_w = anchor_w * exp(tw)
# b_h = anchor_h * exp(th)
wh_pred = torch.exp(txtytwth_pred[..., 2:]) * self.all_anchor_wh
# [B, H*W, anchor_n, 4] -> [B, H*W*anchor_n, 4]
xywh_pred = torch.cat([xy_pred, wh_pred], -1).view(B, -1, 4) * self.stride
return xywh_pred
def decode_boxes(self, txtytwth_pred):
"""
Input: \n
txtytwth_pred : [B, H*W, anchor_n, 4] \n
Output: \n
x1y1x2y2_pred : [B, H*W*anchor_n, 4] \n
"""
# txtytwth -> cxcywh
xywh_pred = self.decode_xywh(txtytwth_pred)
# cxcywh -> x1y1x2y2
x1y1x2y2_pred = torch.zeros_like(xywh_pred)
x1y1_pred = xywh_pred[..., :2] - xywh_pred[..., 2:] * 0.5
x2y2_pred = xywh_pred[..., :2] + xywh_pred[..., 2:] * 0.5
x1y1x2y2_pred = torch.cat([x1y1_pred, x2y2_pred], dim=-1)
return x1y1x2y2_pred
def nms(self, dets, scores):
""""Pure Python NMS baseline."""
x1 = dets[:, 0] #xmin
y1 = dets[:, 1] #ymin
x2 = dets[:, 2] #xmax
y2 = dets[:, 3] #ymax
areas = (x2 - x1) * (y2 - y1)
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
w = np.maximum(1e-10, xx2 - xx1)
h = np.maximum(1e-10, yy2 - yy1)
inter = w * h
# Cross Area / (bbox + particular area - Cross Area)
ovr = inter / (areas[i] + areas[order[1:]] - inter)
#reserve all the boundingbox whose ovr less than thresh
inds = np.where(ovr <= self.nms_thresh)[0]
order = order[inds + 1]
return keep
def postprocess(self, bboxes, scores):
"""
bboxes: (HxW, 4), bsize = 1
scores: (HxW, num_classes), bsize = 1
"""
cls_inds = np.argmax(scores, axis=1)
scores = scores[(np.arange(scores.shape[0]), cls_inds)]
# threshold
keep = np.where(scores >= self.conf_thresh)
bboxes = bboxes[keep]
scores = scores[keep]
cls_inds = cls_inds[keep]
# NMS
keep = np.zeros(len(bboxes), dtype=np.int)
for i in range(self.num_classes):
inds = np.where(cls_inds == i)[0]
if len(inds) == 0:
continue
c_bboxes = bboxes[inds]
c_scores = scores[inds]
c_keep = self.nms(c_bboxes, c_scores)
keep[inds[c_keep]] = 1
keep = np.where(keep > 0)
bboxes = bboxes[keep]
scores = scores[keep]
cls_inds = cls_inds[keep]
return bboxes, scores, cls_inds
@ torch.no_grad()
def inference(self, x):
# backbone
feats = self.backbone(x)
# reorg layer
p5 = self.convsets_1(feats['layer3'])
p4 = self.reorg(self.route_layer(feats['layer2']))
p5 = torch.cat([p4, p5], dim=1)
# head
p5 = self.convsets_2(p5)
# pred
pred = self.pred(p5)
B, abC, H, W = pred.size()
# [B, num_anchor * C, H, W] -> [B, H, W, num_anchor * C] -> [B, H*W, num_anchor*C]
pred = pred.permute(0, 2, 3, 1).contiguous().view(B, H*W, abC)
# [B, H*W*num_anchor, 1]
conf_pred = pred[:, :, :1 * self.num_anchors].contiguous().view(B, H*W*self.num_anchors, 1)
# [B, H*W, num_anchor, num_cls]
cls_pred = pred[:, :, 1 * self.num_anchors : (1 + self.num_classes) * self.num_anchors].contiguous().view(B, H*W*self.num_anchors, self.num_classes)
# [B, H*W, num_anchor, 4]
reg_pred = pred[:, :, (1 + self.num_classes) * self.num_anchors:].contiguous()
# decode box
reg_pred = reg_pred.view(B, H*W, self.num_anchors, 4)
box_pred = self.decode_boxes(reg_pred)
# batch size = 1
conf_pred = conf_pred[0]
cls_pred = cls_pred[0]
box_pred = box_pred[0]
# score
scores = torch.sigmoid(conf_pred) * torch.softmax(cls_pred, dim=-1)
# normalize bbox
bboxes = torch.clamp(box_pred / self.input_size, 0., 1.)
# to cpu
scores = scores.to('cpu').numpy()
bboxes = bboxes.to('cpu').numpy()
# post-process
bboxes, scores, cls_inds = self.postprocess(bboxes, scores)
return bboxes, scores, cls_inds
def forward(self, x, target=None):
if not self.trainable:
return self.inference(x)
else:
# backbone
feats = self.backbone(x)
# reorg layer
p5 = self.convsets_1(feats['layer3'])
p4 = self.reorg(self.route_layer(feats['layer2']))
p5 = torch.cat([p4, p5], dim=1)
# head
p5 = self.convsets_2(p5)
# pred
pred = self.pred(p5)
B, abC, H, W = pred.size()
# [B, num_anchor * C, H, W] -> [B, H, W, num_anchor * C] -> [B, H*W, num_anchor*C]
pred = pred.permute(0, 2, 3, 1).contiguous().view(B, H*W, abC)
# [B, H*W*num_anchor, 1]
conf_pred = pred[:, :, :1 * self.num_anchors].contiguous().view(B, H*W*self.num_anchors, 1)
# [B, H*W, num_anchor, num_cls]
cls_pred = pred[:, :, 1 * self.num_anchors : (1 + self.num_classes) * self.num_anchors].contiguous().view(B, H*W*self.num_anchors, self.num_classes)
# [B, H*W, num_anchor, 4]
reg_pred = pred[:, :, (1 + self.num_classes) * self.num_anchors:].contiguous()
reg_pred = reg_pred.view(B, H*W, self.num_anchors, 4)
# decode bbox
x1y1x2y2_pred = (self.decode_boxes(reg_pred) / self.input_size).view(-1, 4)
x1y1x2y2_gt = target[:, :, 7:].view(-1, 4)
reg_pred = reg_pred.view(B, H*W*self.num_anchors, 4)
# set conf target
iou_pred = tools.iou_score(x1y1x2y2_pred, x1y1x2y2_gt).view(B, -1, 1)
gt_conf = iou_pred.clone().detach()
# [obj, cls, txtytwth, x1y1x2y2] -> [conf, obj, cls, txtytwth]
target = torch.cat([gt_conf, target[:, :, :7]], dim=2)
# loss
(
conf_loss,
cls_loss,
bbox_loss,
iou_loss
) = tools.loss(pred_conf=conf_pred,
pred_cls=cls_pred,
pred_txtytwth=reg_pred,
pred_iou=iou_pred,
label=target
)
return conf_loss, cls_loss, bbox_loss, iou_loss
if __name__=='__main__':
import cv2
from utils.vocapi_evaluator import VOCAPIEvaluator
from utils.augmentations import SSDAugmentation
from data import BaseTransform
def vis_data(images, targets, input_size):
# 可视化数据
mean = (0.406, 0.456, 0.485)
std = (0.225, 0.224, 0.229)
mean = np.array(mean, dtype=np.float32)
std = np.array(std, dtype=np.float32)
img = images.permute(1, 2, 0).cpu().numpy()[:, :, ::-1]
img = ((img * std + mean) * 255).astype(np.uint8)
img = img.copy()
for box in targets:
xmin, ymin, xmax, ymax = box[:-1]
# print(xmin, ymin, xmax, ymax)
xmin *= input_size
ymin *= input_size
xmax *= input_size
ymax *= input_size
cv2.rectangle(img, (int(xmin), int(ymin)), (int(xmax), int(ymax)), (0, 0, 255), 2)
cv2.imshow('img', img)
cv2.waitKey(0)
from data.voc0712 import VOCDetection
device = 'cuda' if torch.cuda.is_available() else 'cpu'
dataset = VOCDetection(data_dir='../VOCdevkit/',transform=SSDAugmentation(416))
evaluator = VOCAPIEvaluator(data_root='../VOCdevkit/',
img_size=416,
device=device,
transform=BaseTransform(416))
image,label=dataset[0]
anchor_size=[[1.19, 1.98], [2.79, 4.59], [4.53, 8.92], [8.06, 5.29], [10.32, 10.65]]
model = YOLOv2D19(device=device,
input_size=640,
num_classes=20,
anchor_size=anchor_size)
print(model)
optimizer = torch.optim.SGD(model.parameters(),
lr=0.001,
momentum=0.99,
weight_decay=0.01
)
for epoch in range(10):
for image,labels in dataset:
labels=[label.tolist() for label in labels]
vis_data(image, labels, 416)
# 标签对齐
targets = tools.gt_creator(input_size=640,
stride=model.stride,
label_lists=labels,
anchor_size=anchor_size
)
conf_loss, cls_loss, box_loss, iou_loss = model(image, target=targets)
total_loss = conf_loss + cls_loss + box_loss + iou_loss
total_loss.backward()
optimizer.step()
optimizer.zero_grad()
print('loss',total_loss.item)
# 模型评估
best_map = -1000
model_eval = model
# set eval mode
model_eval.trainable = False
model_eval.set_grid(416)
model_eval.eval()
# evaluate
evaluator.evaluate(model_eval)
cur_map = evaluator.map
print('map', cur_map)
if cur_map > best_map:
# update best-map
best_map = cur_map
参考文献:
yolov2-yolov3-PyTorch-master.zip资源-CSDN文库
【YOLO系列】YOLOv2论文超详细解读(翻译 +学习笔记)_路人贾'ω'的博客-CSDN博客
YOLOV2详解_白鲸先神的博客-CSDN博客
tztztztztz/yolov2.pytorch: YOLOv2 algorithm reimplementation with pytorch (github.com)
longcw/yolo2-pytorch: YOLOv2 in PyTorch (github.com)
yjh0410/yolov2-yolov3_PyTorch (github.com)
YOLOV3
参考文献:
YOLOv3详解_yolov3是什么_wq_0708的博客-CSDN博客
睿智的目标检测26——Pytorch搭建yolo3目标检测平台_Bubbliiiing的博客-CSDN博客
yolov3模型训练——使用yolov3训练自己的模型_萝北村的枫子的博客-CSDN博客
YOLOv3原理详解(绝对通俗易懂)2021-07-01_YD-阿三的博客-CSDN博客



![强化学习从基础到进阶-案例与实践[3]:表格型方法:Sarsa、Qlearning;蒙特卡洛策略、时序差分等以及Qlearning项目实战](https://img-blog.csdnimg.cn/img_convert/66cf991d2b104a17642d74e15af55706.png)