概述
本文以华为最新国产深度学习框架Mindspore为基础,将城市道路下的实况图片解析作为任务背景,以复杂城市道路进行高精度的语义分割为任务目标,对上述难处进行探究并提出相应方案,成功地在Cityscapes数据集上完成了语义分割任务。
整体的技术方案见图:

本帖仅对代码上的更改以及项目进行介绍。
项目地址
https://gitee.com/xujinminghahaha/mindspore_model
相关配置
硬件配置
| 操作系统 | Ubuntu 18.04 | 硬件架构 | X86_64 |
|---|---|---|---|
| CPU | Intel® Xeon® Gold 6154 CPU @ 3.00GHz | GPU | NVIDIA-A100(40G) |
| 深度学习框架 | Mindspore 1.6.0 | Batch_sizes | 7 |
Cityscapes数据集:
Cityscapes数据集提供了3475张细粒度分割标签图,以及20 000张粗略分割的图像,本文使用了细粒度标注的train/val集进行训练和验证,此数据集与之前的CamVid,Leuven,Daimler 城市数据集不同,Cityscapes更多的捕捉到了真实世界的城市道路场景的多样性与复杂性,尤其是为城市环境中的自动驾驶量身定制,涉及范围更广的高度复杂的市中心街道场景,并且这些场景分别在50个不同城市采集。

数据集下载地址:https://www.cityscapes-dataset.com/
实现流程记录
1、 参考华为官方gitee仓库的modelzoo克隆至本地,找到research/cv/PSPNet目录,在此代码基础上进行修改。

本项目基于GPU平台,对modelzoo中原有的昇腾文件已清除。代码中shell_command提供了训练脚本和验证脚本的启动命令,同时附带linux服务器一键下载Cityscapes下载方式。
2、由于选题是道路场景,所以需要更改数据集为Cityscapes,由于modelzoo上的数据集仅支持VOC2012和ADE20K,所以需要增加对数据集的适配和标签信息转换。
在代码中已经添加了对于cityscapes的像素点和label的转换代码,可以直接使用,其中颜色和类别的映射关系请见:config/cityscapes_colors.txt以及config/cityscapes_names.txt
3、网络架构选用可插拔的残差网络,以及金字塔池化模块解码。相关代码实现在src/model目录下。
ResNet论文地址:https://arxiv.org/abs/1512.03385
PSPNet论文地址:https://arxiv.org/abs/1612.01105
网络结构图:

金字塔池化模块:

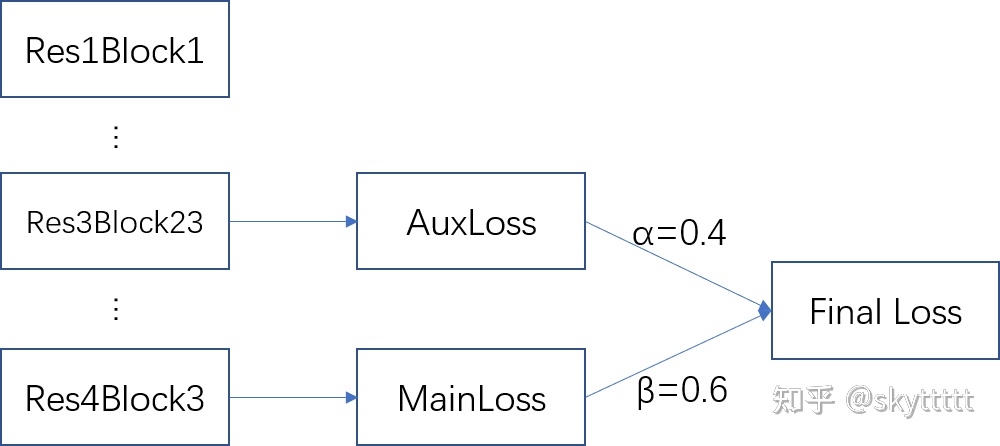
loss函数的设计:
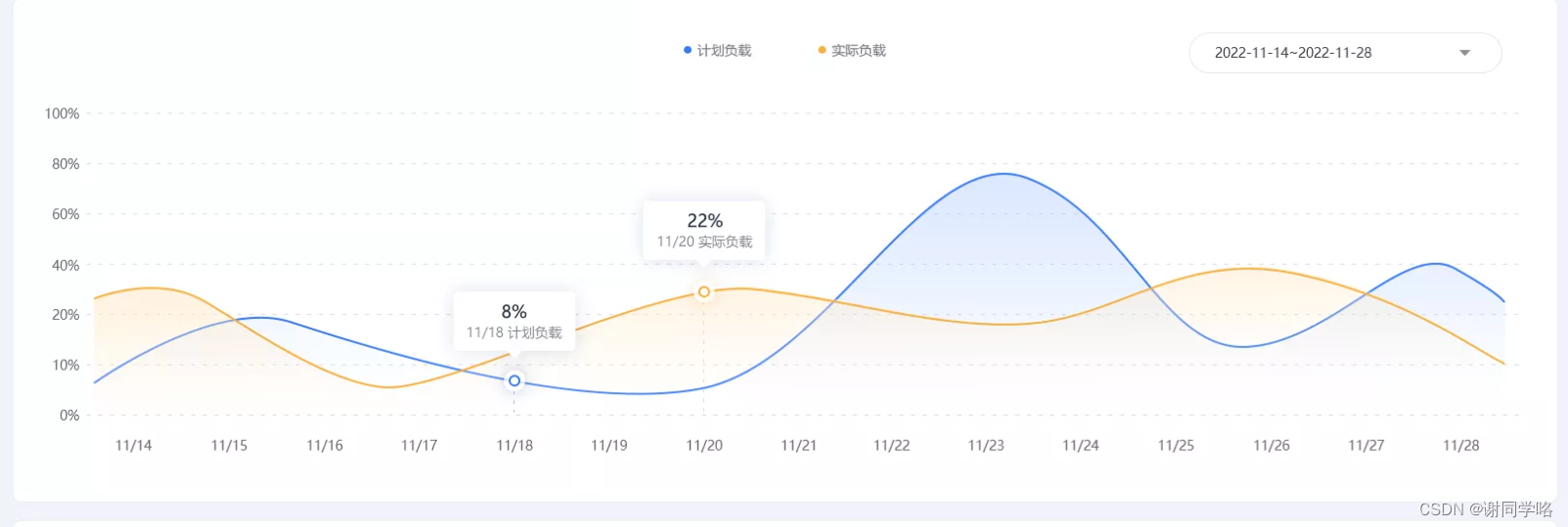
实际训练时的loss值变化趋势:

特色功能
4、测试时增强(TTA, Test Time Augmentation),通过多尺度推理最后取平均的方法获得更好的效果:
以下给出方法伪码,供大家参考,具体实现请结合代码仓库查阅。
# Algorithm 1: TTA(Test Time Augmentation)
# Input:Image,Scales,Crop_size,Net
# OutPut:Image with Label
batch, _,ori_height, ori_width = image.shape #获取图像shape
stride_h ,stride_w = crop_size #步长,cropsize为训练时设置的crop参数
final_pred = Tensor(np.zeros([1, dataset.num_classes, ori_height, ori_width])) #初始化结果
for scales:
image = dataset.multi_scale_aug(image,scale)
height, width = image.shape[:-1]
new_h, new_w = image.shape[:-1]
rows, cols = GetParam(new_h, new_w) #一张图片分为row行和col列分块推理
preds = np.zeros([1, dataset.num_classes, new_h, new_w]).astype(np.float32)#初始化
count = np.zeros([1, 1, new_h, new_w]).astype(np.float32)#记录像素点推理次数
for rows,cols:
h0 , w0, h1, w1 = GetIndex(rows,cols,stride_h,strid_w) #获得格点坐标
crop_img = new_img[h0:h1, w0:w1, :]
crop_img = crop_img.transpose((2, 0, 1))
crop_img = np.expand_dims(crop_img, axis=0)
pred = dataset.inference(model, crop_img, flip)
preds[:, :, h0:h1, w0:w1] += pred.asnumpy()[:, :, 0:h1 - h0, 0:w1 - w0]
count[:, :, h0:h1, w0:w1] += 1 #将推理矩阵相加,再把标记矩阵相加
preds = preds / count #求得平均推理像素值
preds = preds[:, :, :height, :width]
preds = P.ResizeBilinear((ori_height, ori_width))(preds) #恢复原始大小
final_pred = P.Add()(final_pred, preds)
return final_pred在config/pspnet_resnet_cityscapes_gpu.yaml下scales那一行,可以输入一个数组,该数组中每一个Value对应一个Scale,inference将会在此scale下输出一次。
5、 结果展示:
| road | traffic light | rider | bicycle | sidewalk | traffic sign | car | pole |
|---|---|---|---|---|---|---|---|
| 97.81% | 63.08% | 56.61% | 74.33% | 83.69% | 69.24% | 92.79% | 45.66% |
| building | vegetation | truck | person | fence | sky | train | mIoU |
| 90.71% | 90.43% | 71.73% | 75.35% | 55.50% | 92.89% | 43.63% | 74.874% |





![[附源码]计算机毕业设计基于springboot和vue的茶文化交流平台的设计与实现](https://img-blog.csdnimg.cn/239729ffdbf048b9b2cd367aa1cc840c.png)