目录
前言
1.悬架模型
2.LMI求解
3.simulink仿真分析
3.1结论
前言
对于H2/H∞控制的鲁棒项相比不用多说,之前也写过两篇关于1/4车的H2/H∞控制文章,链接如下:
基于LMI的车辆主动悬架控制_Mr. 邹的博客-CSDN博客
基于MATLAB/Simulink的不确定性H2/H∞最优保性能LMI车辆主动悬架控制仿真分析_Mr. 邹的博客-CSDN博客
本篇文章再做一篇关于半车的H2/H无穷算法控制仿真分析:
这里建议大家将往期的LMI求解文章以及悬架建模文章稍微过一遍,之后再进行本篇文章的阅读,推荐链接:
半车(前后、左右)、整车悬架详细推导建模和simulink仿真分析_Mr. 邹的博客-CSDN博客_悬架模型simulink
线性二自由度模型建立及simulink仿真分析_Mr. 邹的博客-CSDN博客_线性二自由度
基于LMI的输出反馈H∞控制及其仿真(含实现程序)_Mr. 邹的博客-CSDN博客_lmi控制
基于LMI的线性化系统控制(含程序模型)_Mr. 邹的博客-CSDN博客_lmi控制
H∞输出反馈控制器推导(最后含例子及程序)_Mr. 邹的博客-CSDN博客
1.悬架模型

2.LMI求解
设定好H2约束条件(约束在设定的范围内)、H∞控制输出(最小化),H2最小化目标r2 = 2.5时,反馈增益求解结果:

3.simulink仿真分析
H2性能指标r2和H∞约束条件抑制度r1的关系:

r2取2.5时:




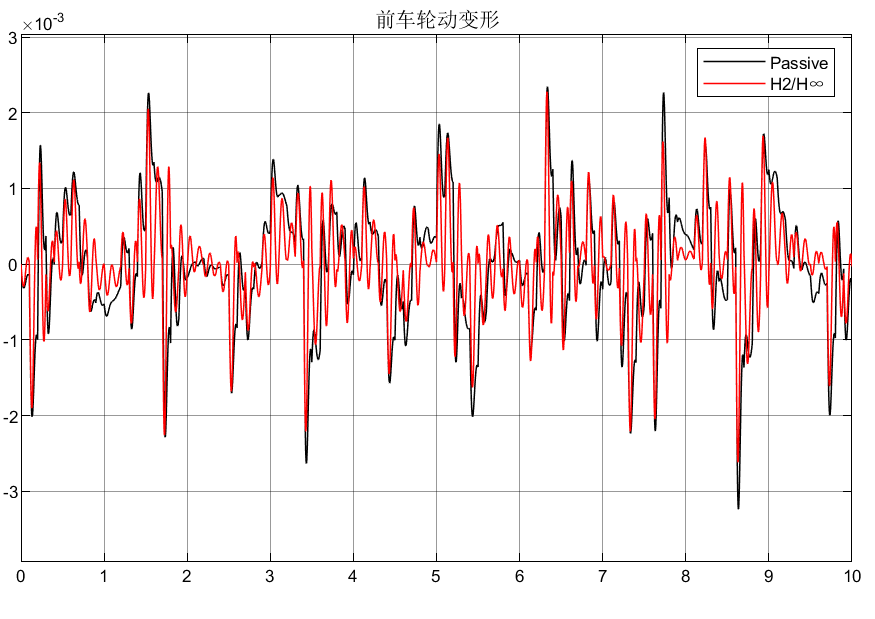

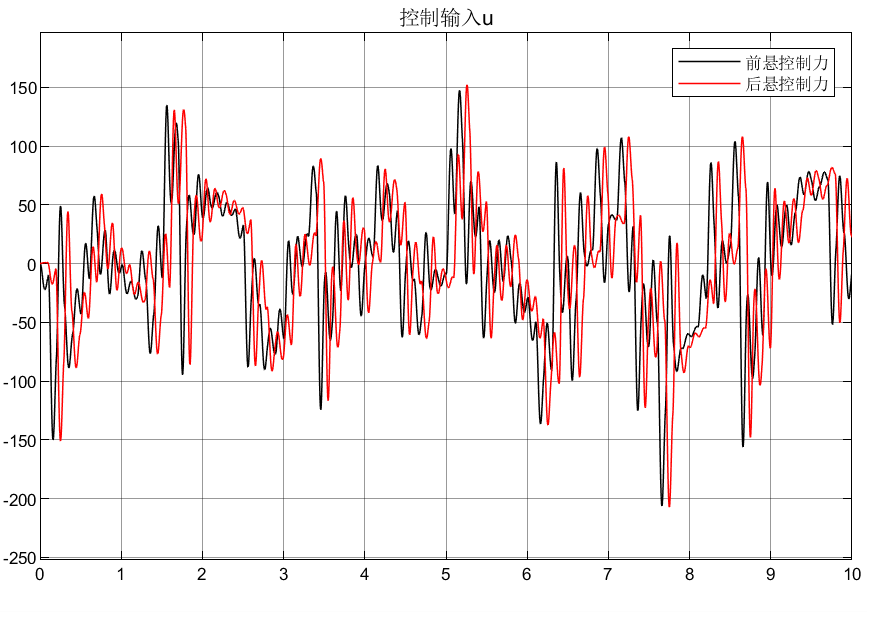
3.1结论
可以看到车轮动变形和悬架动扰度在不被恶化,满足设定的H2约束条件内,最优化车身加速度和俯仰角加速度性能指标,证实了H2/H∞状态反馈算法的鲁棒项和实用性。
注:欢迎交流,有问题请私聊,谢谢理解!






![[附源码]Python计算机毕业设计SSM教学团队管理系统(程序+LW)](https://img-blog.csdnimg.cn/1547dbbae0c54bcb8987a247f04fe261.png)

