算法的重构是压缩感知中重要的一步,是压缩感知的关键之处。因为重构算法关系着信号能否精确重建,国内外的研究学者致力于压缩感知的信号重建,并且取得了很大的进展,提出了很多的重构算法,每种算法都各有自己的优缺点,使用者可以根据自己的情况,选择适合自己的重构算法,大大增加了使用的灵活性,也为我们以后的研究提供了很大的方便。
压缩感知的重构算法主要分为三大类:
1.组合算法 2.贪婪算法 3.凸松弛算法
三种算法对比分析如下:
| 算法类别 | 定义 | 优缺点 | 具体算法 |
| 贪婪算法 | 贪婪算法首先选取合适的原子,再逐步进行递增,进而逼近信号矢量,利用这种过程进行 | 计算量和精度的要求居中,也是三种重构算法中应用最大的一种 | (1)匹配追踪算法 (2)正交匹配追踪算法 (3)分段正交匹配追踪算法 (4)正则化正交匹配追踪算法 (5)稀疏自适应匹配追踪算法 |
| 组合算法 | 先是对信号进行结构采样,然后再通过对采样的数据进行分组测试,最后完成信号的重构 | 需要观测的样本数目比较多但运算的效率最高 | (1) 傅里叶采样 (2) 链式追踪算法 (3) HHS追踪算法 |
| 凸松弛算法 | 法,它将非凸问题转化为凸问题进行求解,即l0范数转化成l1范数并采用线性规划来求解 | 计算量大但是需要观测的数量少重构的时候精度高 | (1)基追踪算法 (2)最小全变差算法 (3)内点法 (4)梯度投影算法 (5)凸集交替投影算法 |
本篇主要分析匹配追踪算法(Matching Pursuit MP)
匹配追踪算法是Mallat和ZHANG在小波分析的基础上提出的,是贪婪迭代算法中的比较基本的算法,有其显著的特点,是学习研究贪婪算法的基础。
1、MP算法的原理
![]()
其中测量矩阵又称为过完备字典,每一列被称为一个原子,则测量矩阵中有n个原子,而y的长度为m,原子的个数远远大于信号的长度,即m<<n,因此测量矩阵又称为过完备字典。信号y在测量矩阵上进行分解,单位向量长度为1,要对过完备字典的原子进行归一化处理。
MP算法的基本思想:
从观测矩阵(过完备字典)中选择一个与信号y相关性最大(最匹配)的原子,也就是观测矩阵中的一列,构建信号的稀疏逼近,求出信号的残差,重复上面的操作,继续选择与信号残差最匹配的一个原子,如此反复迭代直到达到迭代次数,最后信号y就可以表示为这些原子的线性组合。
2、MP算法的理论框图
根据MP算法的原理,得出MP算法的理论图,这样更容易理解。
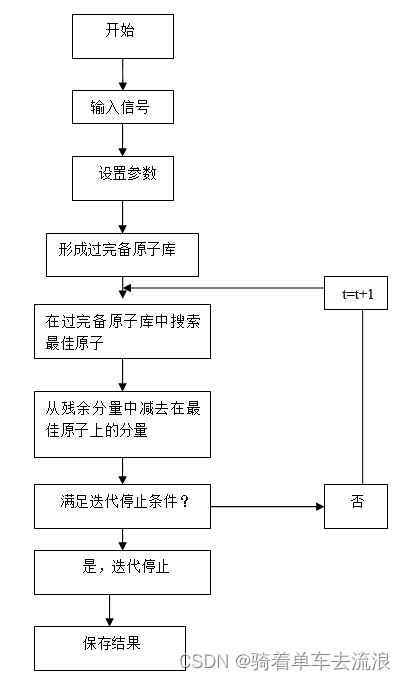
3、MP算法的算法流程
根据MP算法的理论框图,现在写出MP算法的算法流程,这样让我们对MP算法有一个更加清晰的理解。
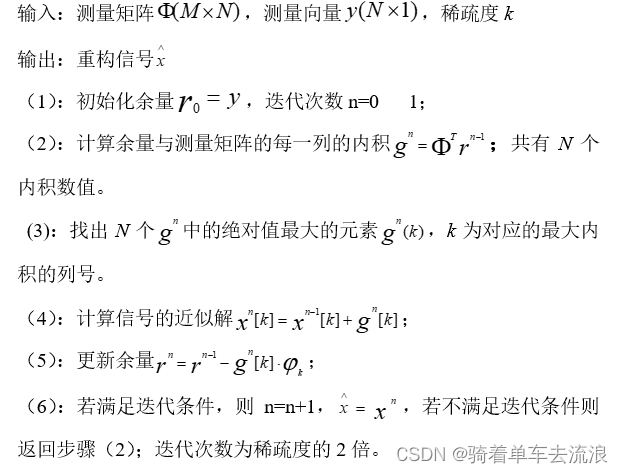
4、MP算法的信号重构
分别通过对一维离散信号,二维Lena为例,进行MP算法的信号重构。
(1)一维离散信号的MP算法仿真
本次仿真使用matlab随机生成的一维离散信号,稀疏度k=23,信号长度N=256,观测向量的长度M=80,那么采样率M/N=0.3,其中的观测矩阵是高斯随机矩阵。采用MP算法对一维信号进行重构,重构图:
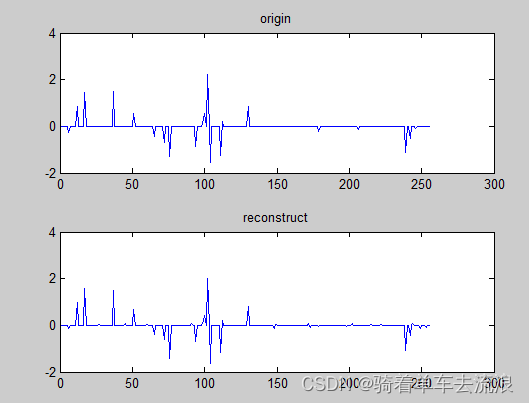
通过上面的重构可以得出,MP算法对一维信号有很好的重构效果。
(2)二维lena图像的MP算法重构
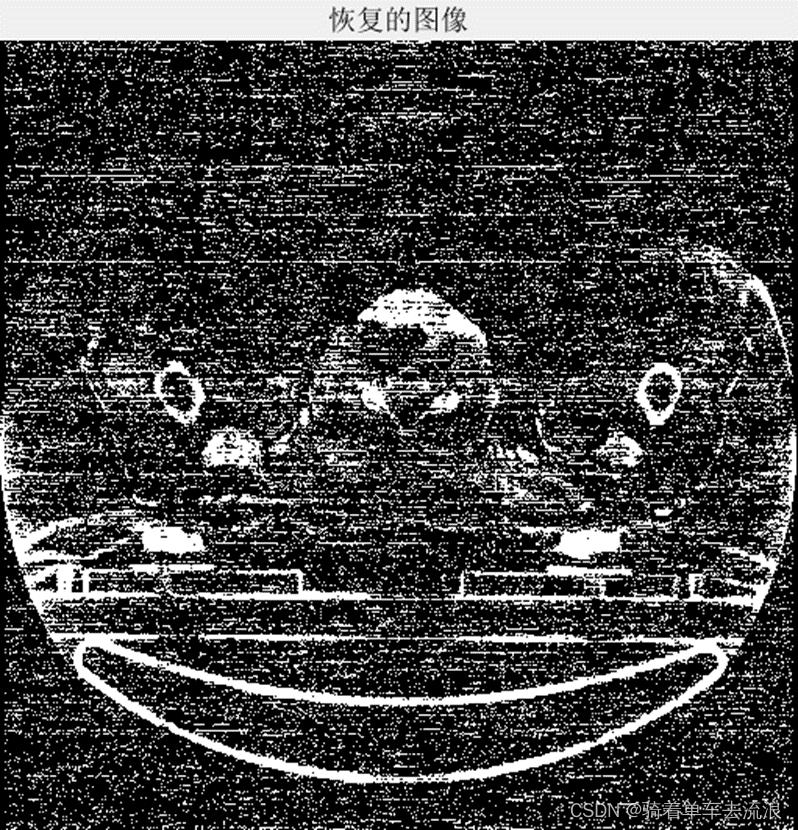
我们上面的研究知道MP算法对一维信号有很好的重构作用,但是算法不只是要在一维信号中有好的重构功能,还要能很好的重构二维信号才可以,这样应用的范围才会更大。我们知道压缩感知重构的是可压缩的稀疏信号,二维信号是不稀疏的,这就要在进行算法重构的时候进行一些处理,我们可以先采用离散余弦变换(dct)使数据稀疏,算法重构结束之后再进行离散反余弦变换(idct),这样就转化为了我们所需要的。本次在matlab中的仿真,我们采用的是256X256的Lena的二维图像,M=180,N=256,稀疏度k=40,M/N=0.7,观测矩阵是高斯随机矩阵,采用MP算法对二维图像进行重构,重构效果如图:


采样率为0.7的时候,MP算法也能对二维图像进行精确重构。
![[golang 微服务] 4. gRPC介绍,Protobuf结合gRPC 创建微服务](https://img-blog.csdnimg.cn/img_convert/18a78106536bfc73c7eddbce236a6287.png)