一、前言
本例显示了脉冲压缩的效果,其中发射的脉冲被调制并与接收的信号相关联。雷达和声纳系统使用脉冲压缩,通过缩短回波持续时间来提高信噪比(SNR)和距离分辨率。此示例还演示了多普勒处理,其中目标的径向速度由目标运动产生的多普勒频移确定。
二、确定目标的范围和速度
以下雷达系统将线性调频(FM)波形的脉冲序列传播到移动目标并接收回波。通过对回波应用匹配滤波和多普勒处理,雷达系统可以有效地检测目标的范围和速度。
指定雷达系统的要求。此示例使用 3 gHz 的载波频率和 1 mHz 的采样率。
创建系统对象以对雷达系统进行建模。该系统是单静态的。发射器位于(0,0,0)并且是静止的,而目标位于(5000,5000,0),速度为(25,25,0),雷达截面(RCS)为1平方米。
创建脉冲宽度为 10 μs、脉冲重复频率为 10 kHz、扫描带宽为 100 kHz 的线性 FM 波形。匹配的滤波器系数由该波形生成。
为了提高多普勒分辨率,系统发出64个脉冲,回波存储在.数据矩阵沿每列存储快速时间样本(每个脉冲内的时间),沿每行存储慢时间样本(脉冲之间的时间)。
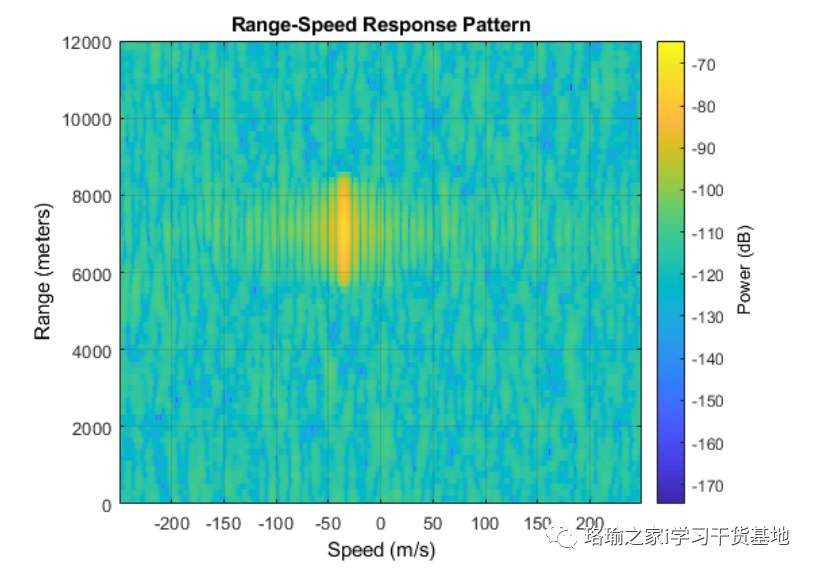
响应显示目标正在以大约 –40 m/s 的速度移动,并且由于速度为负,目标正在远离发射器。
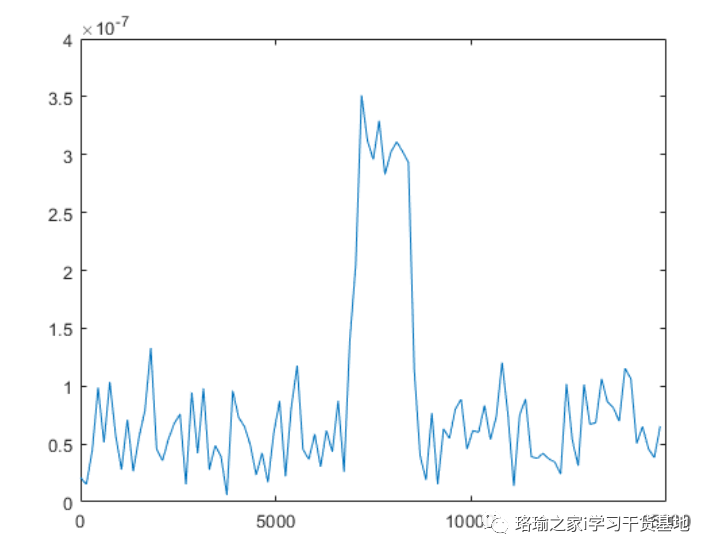
计算对应于信号传播速度的范围门。第一个慢时间样本的图显示了7000 m左右的最大峰值,这与范围-速度响应模式图相对应。
2.1 确定范围
创建误报概率小于 1e-6 的阈值。假设信号为白高斯噪声,则对64个脉冲进行非相干积分。取高于阈值的最大峰值,然后对估计的目标范围进行浸泡。
2.2 确定速度
获取与包含检测到目标的范围箱相对应的慢时样本,并使用该函数绘制慢时样本的功率谱密度估计值。
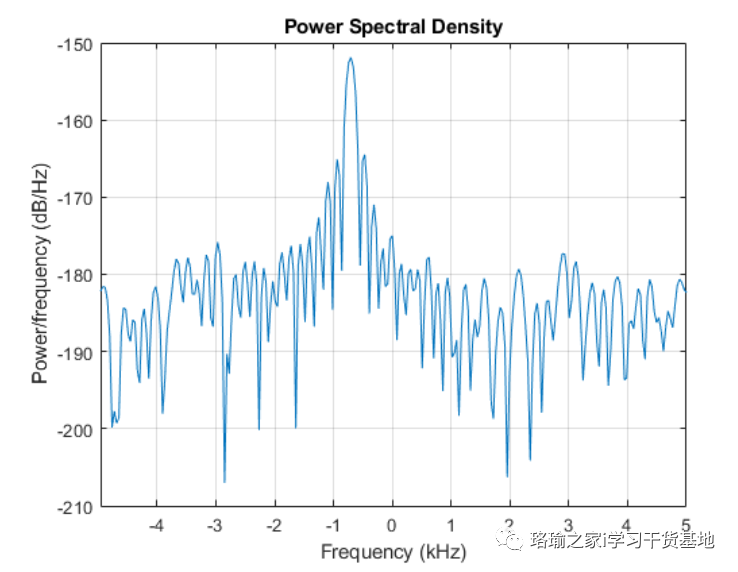
峰值频率对应于多普勒频移除以2,可以转换为目标速度。正速度表示目标正在接近发射器,而负速度表示目标正在远离发射器。
三、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“Example.mlx”文件,点击运行,就可以看到上述效果。
程序下载:基于matlab使用脉冲压缩估计范围和多普勒资源