一、利用fifo对3行数据求和
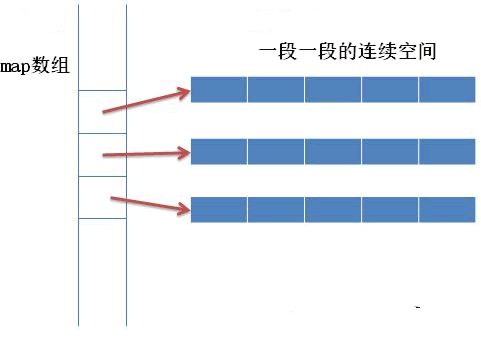
需要2个fifo保存第0行和第1行的数据,如下图
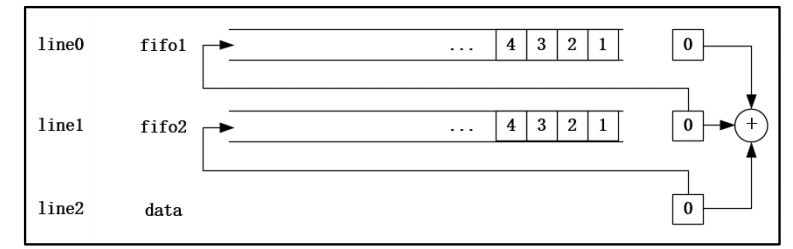
比如有20行数据,则将一行一行的输给fifo2, fifo2出来的数据再给fifo1.当fifo和fifo1有数据时,在准备给 fifo2输入新的一行数据时,同时读出fifo2,fifo1保存的当行的第一个数据,将这三个数据做加法运算得到结果。
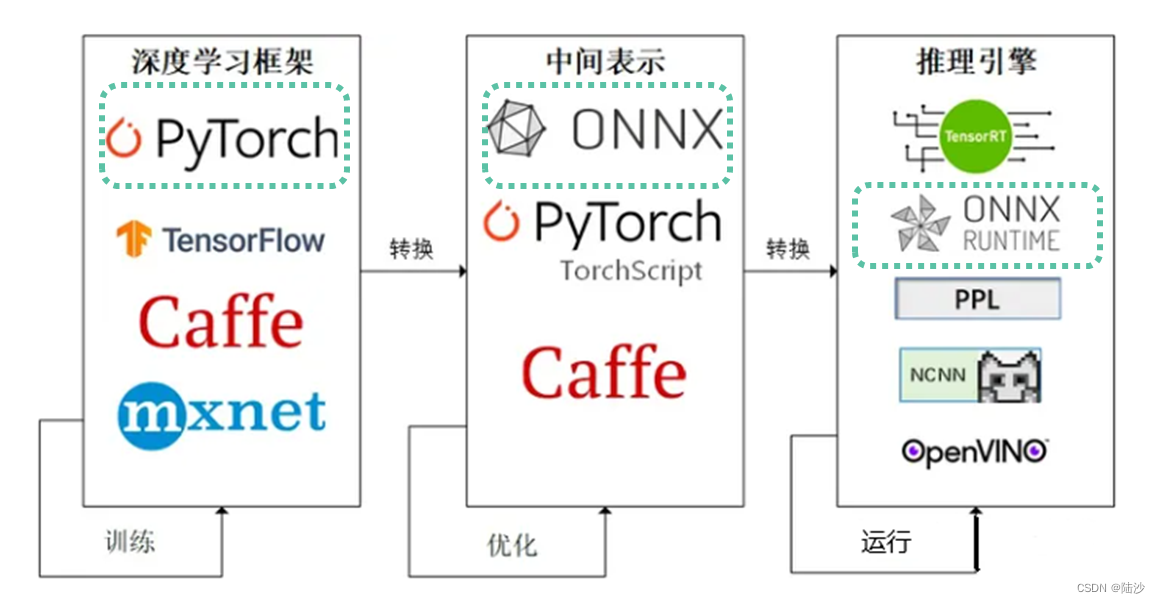
二、sobel边缘检测算法
针对灰度图像做边缘检测,Soble 算法的核心就是 Sobel 算子,该算子包含两组 3x3 的矩阵。
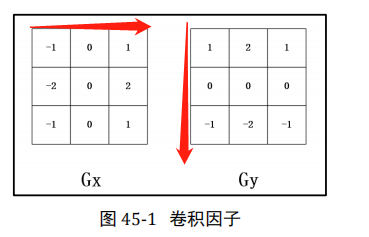
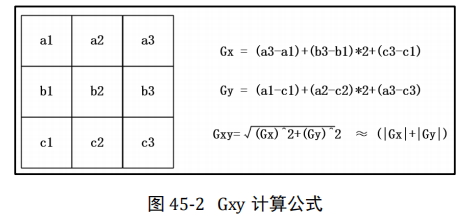
对于图像而言,取 3 行 3 列的图像数据,将图像数据与对应位置的算子的值相乘再相加,得到 x 方向的 Gx,和 y 方向的 Gy,将得到的 Gx 和 Gy,平方后相加,再取算术平方根,得到 Gxy,近似值为 Gx 和 Gy 绝对值之和,将计算得到的 Gxy 与我们设定的阈值相比较,Gxy 如果大于阈值,表示该点为边界点,此点显示黑点,否则显示白点。
三、SPI协议
SPI(Serial Peripheral Interface,串行外围设备接口)通讯协议,是 Motorola 公司提出的一种同步串行接口技术,是一种高速、全双工、同步通信总线,在芯片中只占用四根管脚用来控制及数据传输,广泛用于 EEPROM、Flash、RTC(实时时钟)、ADC(数模转换器)、DSP(数字信号处理器)以及数字信号解码器上,是常用的也是较为重要的通讯协议之一。
SPI 通讯协议的优点是支持全双工通信,通讯方式较为简单,且相对数据传输速率较快;缺点是没有指定的流控制,没有应答机制确认数据是否接收,与 IIC 总线通讯协议相比,在数据可靠性上有一定缺陷,
SPI 通讯设备之间的连接方式可分为一主一从和一主多从
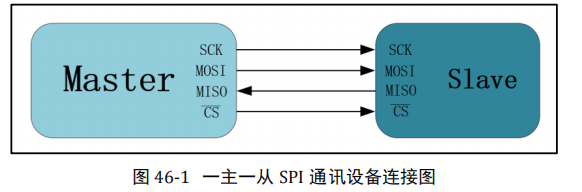
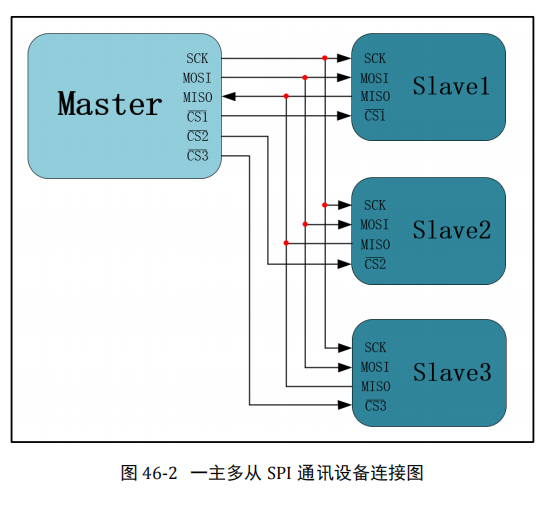
SPI 通讯协议包含 1 条时钟信号线、2 条数据总线和 1 条片选信号线, 时钟信号线为SCK,2 条数据总线分别为 MOSI(主输出从输入)、MISO(主输入从输出),片选信号线为CS
SCK (Serial Clock):时钟信号线,用于同步通讯数据。
MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。
MISO (Master Input,Slave Output):主设备输入/从设备输出引脚。
CS(Chip Select):片选信号线,也称为 CS_N,以下用 CS_N 表示,而每个从设备都有独立的这一条 CS_N 信号线,本信号线独占主机的一个引脚,即有多少个从设备,就有多少条片选信号线,SPI 通讯以 CS_N 线置低电平为开始信号,以 CS_N 线被拉高作为结束信号。
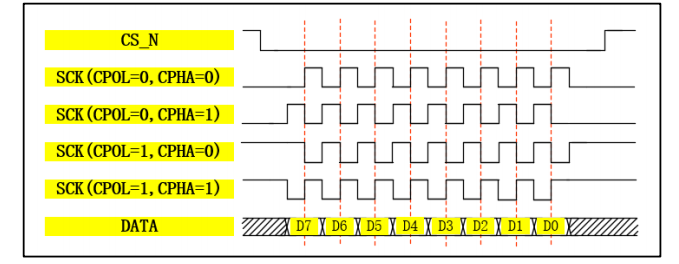
通讯模式
SPI 通讯协议一共有四种通讯模式,模式 0、模式 1、模式 2 以及模式 3,这 4 种模式分别由时钟极性(CPOL,Clock Polarity)和时钟相位(CPHA,Clock Phase)来定义,其中CPOL 参数规定了空闲状态CS_N 为高电平,设备未被选中)时 SCK 时钟信号的电平状态,CPHA 规定了数据采样是在 SCK 时钟的奇数边沿还是偶数边沿。



![深度学习进阶篇[8]:对抗神经网络GAN基本概念简介、纳什均衡、生成器判别器、解码编码器详解以及GAN应用场景](https://img-blog.csdnimg.cn/img_convert/c530a112c911329eaf8cb9cfeaab09fc.png)