01汽车无人驾驶技术
汽车相对地铁列车,控制设备的安装空间较为有限,不同车辆的个体差异较大,其无人驾驶技术的实现方案需要更简约,主流的方案通常是通过多种车载传感器(如摄像头、激光雷达、毫米波雷达、北斗/GPS、惯性传感器等)来识别车辆所处的周边环境和状态,并根据所获得的环境信息自主地控制车辆运动,最终实现无人驾驶。
当前主要采用国际汽车工程师协会(SAE)的划分方法对汽车无人驾驶等级进行定义,分为6个级别,L0~L5:
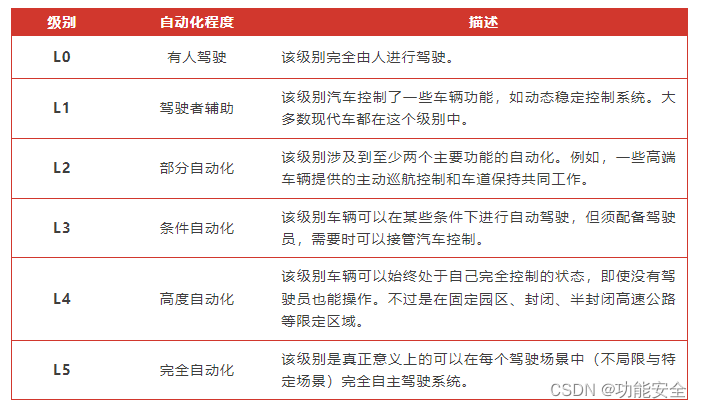
目前L2级及以下辅助驾驶汽车已实现产业化应用,L3级有条件自动驾驶化的汽车正在产业化的道路上发展。而L4级自动驾驶汽车现阶段主要在码头、机场、分级开放道路等特定运用场所开展测试。
02地铁无人驾驶的核心——安全可靠
目前,国内已有68条地铁线路开通或在建无人驾驶(GoA3/4)。轨道交通运行于封闭环境,且通过钢轮钢轨接触进行物理导向,属于线路固定、场景固定、外界环境稳定的一维场景,因此相对于汽车的无人驾驶,环境感知的复杂度更低。
那么是否意味着地铁就更易实现无人驾驶呢?这一观点显然是片面的,地铁线路对于安全性和可靠性的要求远高于汽车,这也导致了设计和产品理念上的差异。不妨看组数据,一列地铁A型车最大载员2580人,相当于516辆小轿车的载客量;根据中国城市轨道交通协会统计数据,国内地铁线路最大的高峰小时断面客流可达6.32万人次;而国庆高峰期间上海某高速收费站,单向5条车道最高车流约4200车次/小时,按每辆车载员5人计,每条车道只有地铁高峰断面客流的1/15。地铁如此密集的客流,一旦出现故障或突发情况,影响面会非常大。
因此对于轨道交通行业而言,任何自动化和智能化的前提都是对于安全的苛求,需要消除一切隐患并保障行车效率,这就需要在产品研制、方案设计、运营场景等方面通盘考虑。
03地铁无人驾驶相对汽车的差异
轨道交通苛求安全,而汽车作为对个体销售的商品需要兼顾性价比,由此在功能和实现方式上带来了不小的差异,包括但不限于如下方面:
1、安全性的差异——小数点后9位
轨道交通功能安全采用CENELEC标准的EN50126,EN50128和EN50129进行评估,满足SIL4的安全等级要求,也就是说每小时每个功能可容忍危险侧故障率(THR)至少控制在小数点后9位。汽车安全评价标准虽然与轨道交通有差异,但到现在尚没有能达到SIL4同等要求的自动驾驶汽车。
2、定位方式的差异——信标校准
地铁列车需要更可靠的定位,信号系统通过安装在轴端的编码里程计和安装在轨旁的信标进行定位。由于列车在行进过程中存在打滑,每隔一段距离会通过固定信标进行绝对位置校准,在车站等需要高定位精度的区域也会将信标布得更密些。这一定位方式更为稳定,能保证定位满足安全的要求,且不受环境因素制约。
无人驾驶汽车则主要采用北斗/GPS进行导航定位,虽然在部分条件下能满足精度要求,但存在隧道等部分区域信号弱的问题,由于公路所有车辆间无法确保互相之间都能实时获取定位信息,也无法保证没有人员或异物侵入运行区域,因此定位信息无法作为无人驾驶汽车安全防护的依据,需要额外依靠雷达等传感器来避障防撞。
3、通信方式的差异——专网保安全
地铁无人驾驶对于通信的安全性和时延有要求较高,需要通过通信的方式获取移动授权来起到安全防护的作用,因此目前普遍采用LTE专网的方式进行通信,安全通信超时5s未刷新则会倒向安全侧。信号系统在信息安全方面需要满足等保三级的要求。
而无人驾驶汽车则普遍采用4G或5G公网进行车地通信,安全性和可靠性上较难达到轨道交通的标准要求。
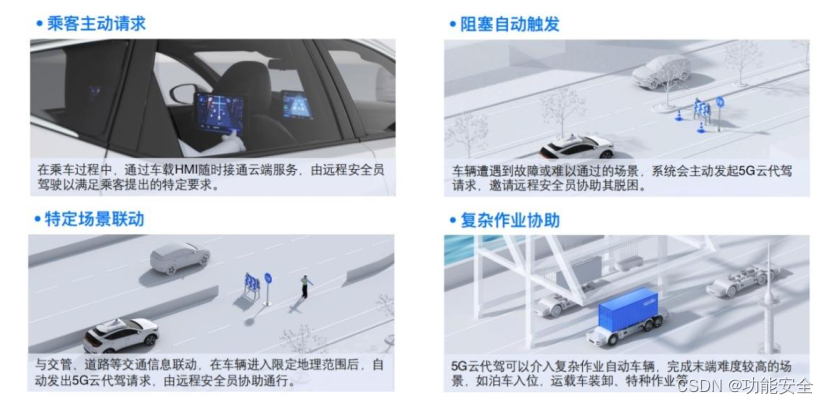
4、场景设计的差异——故障应急是关键
无人驾驶地铁线路需要对故障和应急场景的处置方式进行全盘考虑,在出现火灾、设备故障等突发情况时,通过有效的行车组织方式和与不同专业间的接口联动,保障线路安全可靠的运行。
而对于无人驾驶汽车,往往聚焦的是个体独立运行,较少存在超大客流应急管理组织的需要,也不存在多专业接口间的复杂联动。
04汽车的无人驾驶技术能否直接用于轨道交通?
这是可以探索的方向,但安全性和可靠性是不变的前提。
无人驾驶汽车所采用的雷达和视频感知方式目前已有在轨道交通领域开展试验性质的应用,但事实证明,现阶段要取代保障行车安全的信号系统还有相当大的差距。其根本局限性是列车的安全制动距离和传感器感知距离之间的矛盾。
对于最高时速85km/h的常规地铁线路,考虑最大坡度30/1000,保障紧急制动率取0.87m/s2,不计延时,EB安全制动距离计算结果为489m,而目前激光雷达对于直线轨道上车体大小障碍物的识别距离约为350m,难以满足SIL4等级下感知到障碍物后把车刹停的要求。而对于曲线段以及更高速度等级的线路,作为主用防护的局限性更大。
总体来看,汽车无人驾驶的感知方案可以辅助轨道交通进行异物侵限等特殊场景的防护,但其比较对象是司机的手动操作而不是SIL4的信号系统,主体的行车防护依然需要高安全性和可靠性的系统。