【CloudCompare教程】008:基于点云的三维模型重建(泊松重建)
news2026/2/14 21:56:41



本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/570989.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
接口测试神器:ApiKit
想给大家分享一款技术人必备的接口测试神器:ApiKit,应该是我目前用过,算得上良心的接口工具 背景 作为互联网行业技术从业者,接口调试是必不可少的一项技能,通常我们都会选择使用 Postman 这类工具来进行接口调试&…
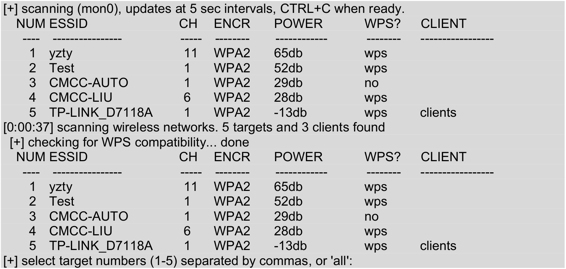
Kali-linux使用Aircrack-ng工具破解无线网络
Aircrack-ng是一款基于破解无线802.11协议的WEP及WPA-PSK加密的工具。该工具主要用了两种攻击方式进行WEP破解。一种是FMS攻击,该攻击方式是以发现该WEP漏洞的研究人员名字(Scott Fluhrer、Itsik Mantin及Adi Shamir)所命名;另一种…

播放量上百亿,易车新媒体矩阵到底做对了什么
消费者的媒介触点和整体决策链路在不断向线上偏移,有数据显示,超7成的车主对信息的获取渠道偏好为汽车垂直媒体。 在这个大背景下,谁能打造更专业的内容,能更快速且广泛地触达用户,谁才更有可能脱颖而出,汽…
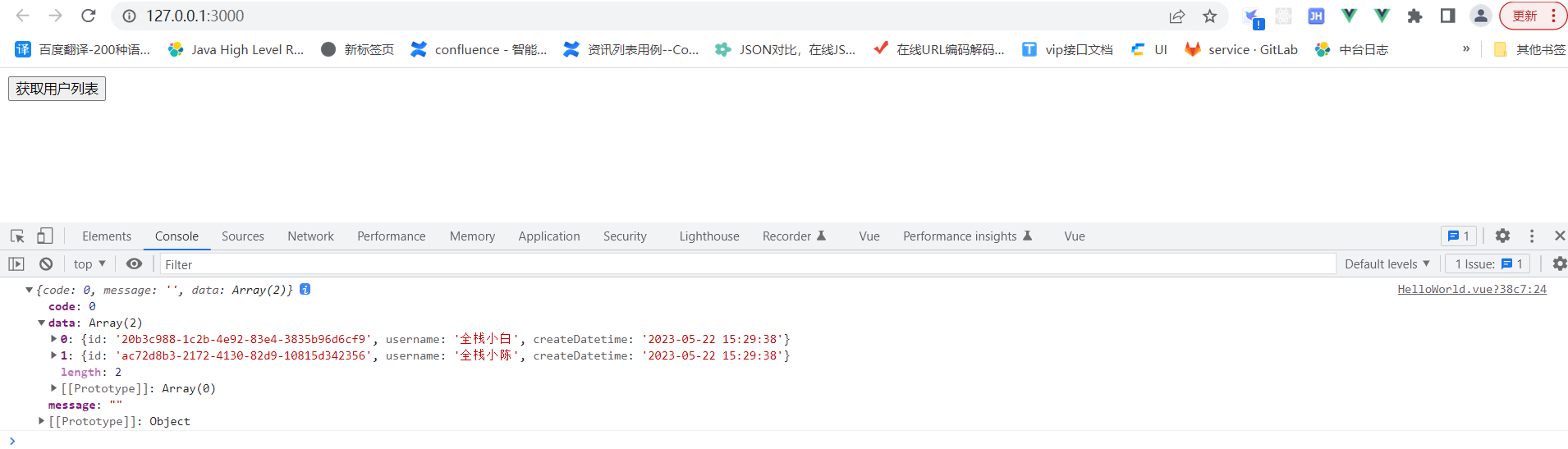
如何快速搭建SpringBoot+Vue前后端分离的开发环境
唠嗑部分
今天我们来说一说,如何快速搭建SpringBootVue前后端分离的开发环境
需要前置环境nodejs,请自行安装(傻瓜式安装)
SpringBoot采用2.4.2版本,Vue采用Vue2版本
言归正传
创建Vue项目
1、安装vue
npm install -g vue/cli2、检查v…
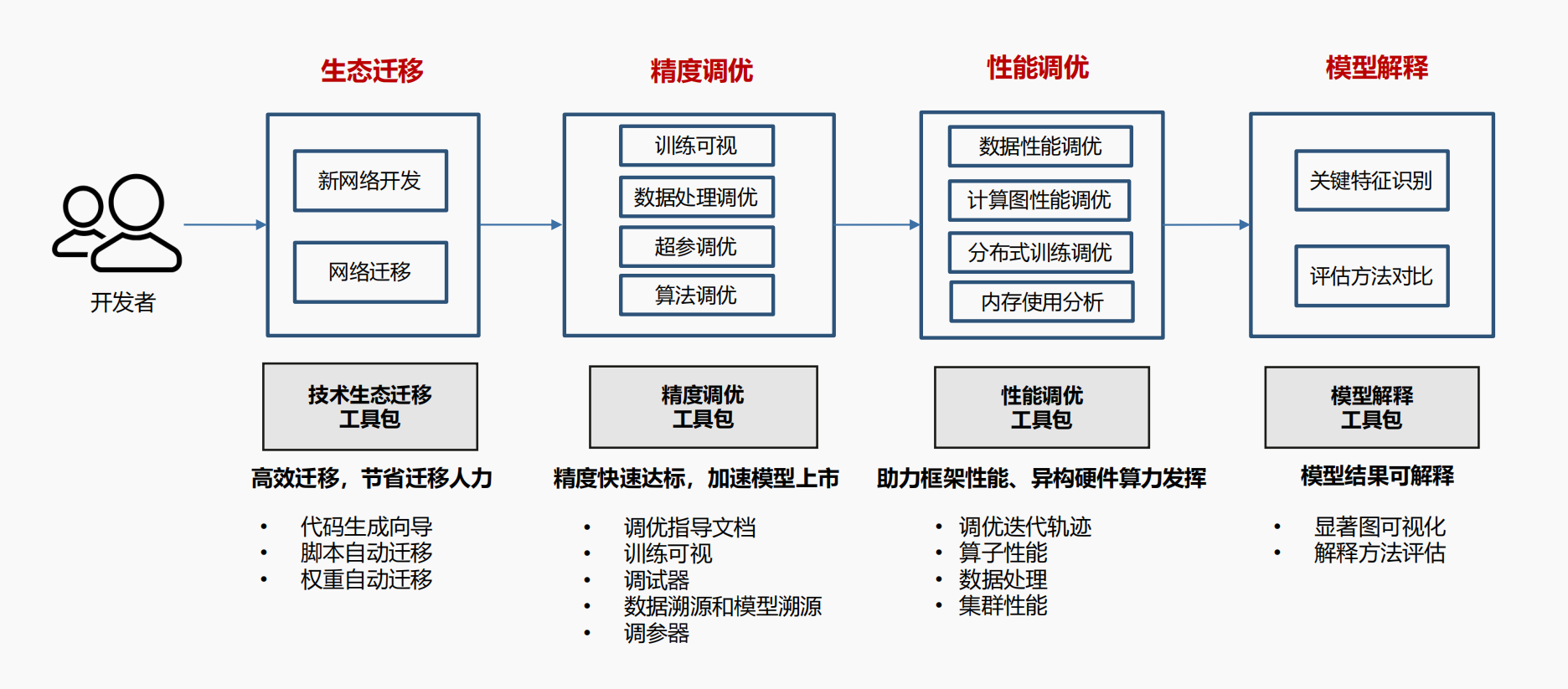
【2023 · CANN训练营第一季】MindSpore模型快速调优攻略 第一章——调试调优背景介绍
1.模型迁移、模型调试调优背景介绍
模型训练\推理过程中可能遇到的问题: • 代码编写错误,问题难以定位; • 模型结构错误; • 权重更新错误; • 损失函数设计错误; • 半精度下计算溢出; • L…

上线11年公众号广告大变天!最新政策解读|西瓜数据
昨晚,微信公众平台的一则公告,在圈内炸开锅了。 ▲ 图片来源:西瓜数据社群截图
公告称:
公众号运营者与第三方商业合作形式推销商品或者服务,如附加购物链接等购买方式的商业合作营销内容,在2023年6月30日…

迅为RK3568开发板Android 双屏/三屏同显
iTOP-RK3568 开发板支持以下屏幕
迅为 LVDS 7 寸屏幕
迅为 LVDS 10.1 寸 1024*600 屏幕
迅为 LVDS 10.1 寸 1280*800 屏幕
迅为 MIPI 7 寸屏幕
HDMI 屏幕(通过 HDMI 线连接)
HDMI 屏幕(通过 VGA 线连接)
然后修改 Android1…

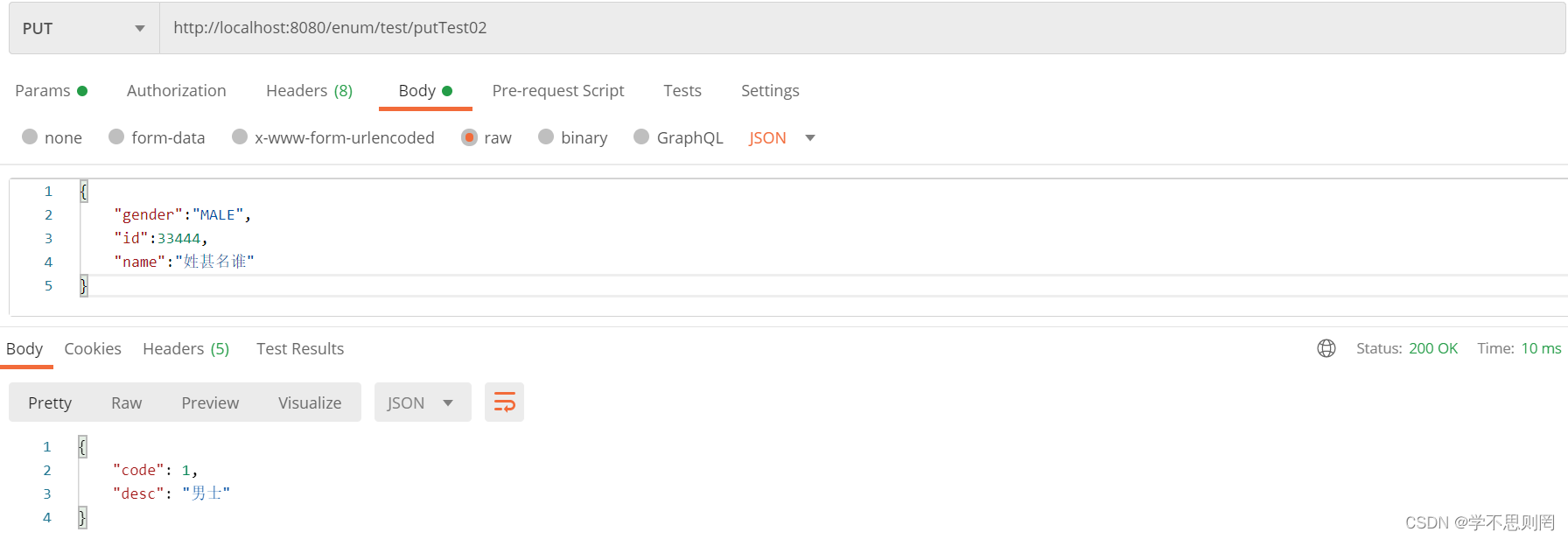
SpringBoot枚举入参实战
文章目录 前言一、什么是枚举?二、枚举的优点三、枚举的缺点四、使用步骤1.代码实现1.1.枚举1.2.实体1.3.控制层 2.Postman测试2.1.Get请求2.1.1.枚举参数2.1.2.对象枚举属性参数 2.2.Post请求2.2.1.枚举参数2.2.2.对象枚举属性参数 2.3.Put请求2.3.1.枚举参数2.3.2…

0基础学习VR全景平台篇第31章:场景功能-嵌入图片
大家好,欢迎收看蛙色平台免费教程! 功能位置示意
一、本功能将用在哪里? 嵌入功能可对VR全景作品嵌入【图片】【视频】【文字】【标尺】四种不同类型内容,本次主要带来图片类型的介绍,满足场景营销、重点标注、幻灯片…
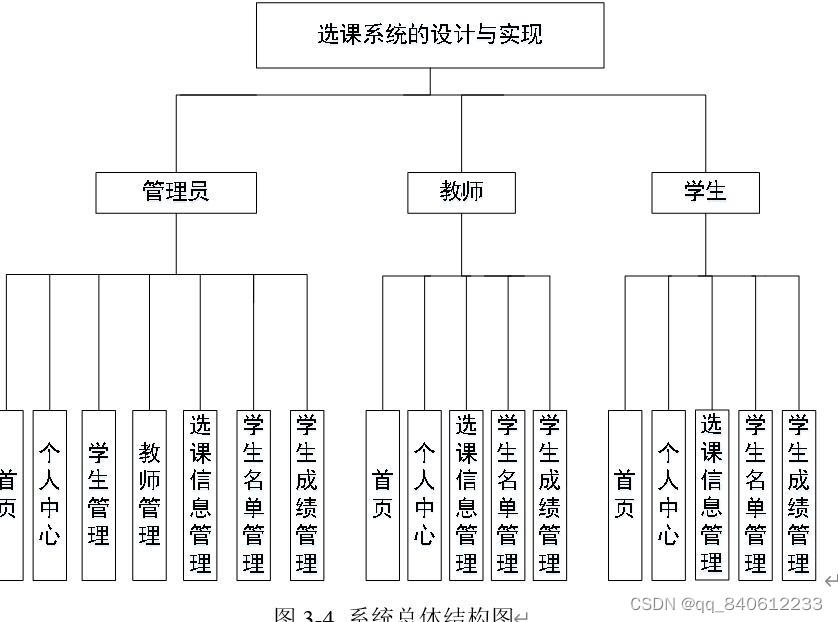
node.js+vue.js大学生在线选课系统的设计与实现93pul
本次设计任务是要设计一个选课系统的设计与实现,通过这个系统能够满足用户对选课信息的需求。系统的主要功能包括:个人中心、学生管理、教师管理、选课信息管理等功能。 管理员可以根据系统给定的账号进行登录,登录后可以进入选课系统的设计与…
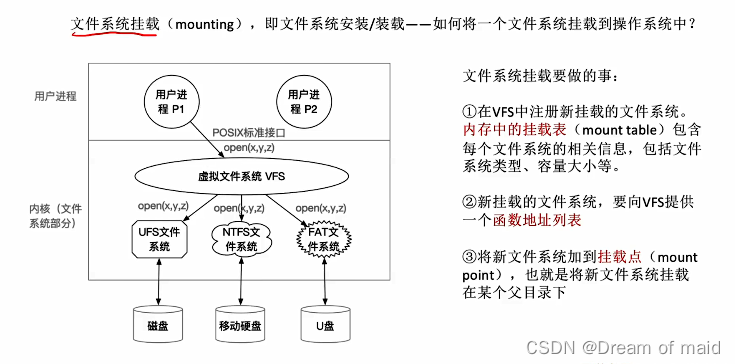
操作系统第四章——文件管理(下)
竹本无心,却节外生枝,藕却有孔,但出淤泥而不染,人生如梦,却却不随人愿,万般皆是命,半点不由人 文章目录 4.1.5 逻辑结构VS物理结构4.1.6 文件的基本操作知识总览创建文件删除文件打开文件关闭文…
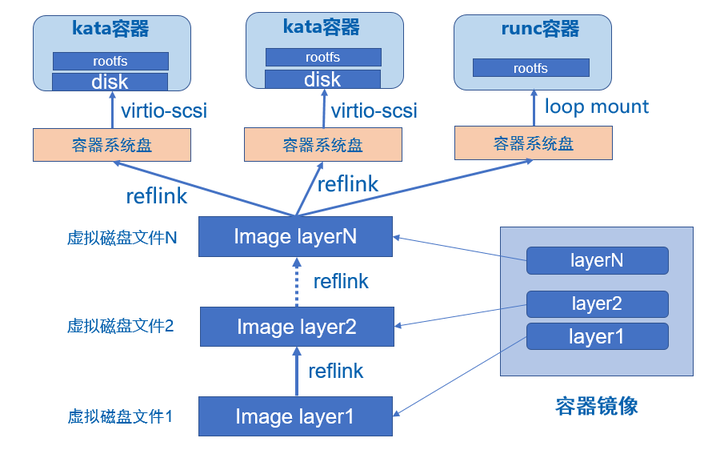
超融合产品集成 Kata 虚拟化容器技术的方案演进 | 龙蜥技术
编者按:超融合技术融合基础实施为企业用户提供虚拟化、容器等不同形态的服务。今天,浪潮数据超融合云原生工程师王永超带大家了解 Kata 虚拟化容器技术,及超融合产品为集成 Kata 容器而进行技术方案演进历程,也分享了超融合 Kata …
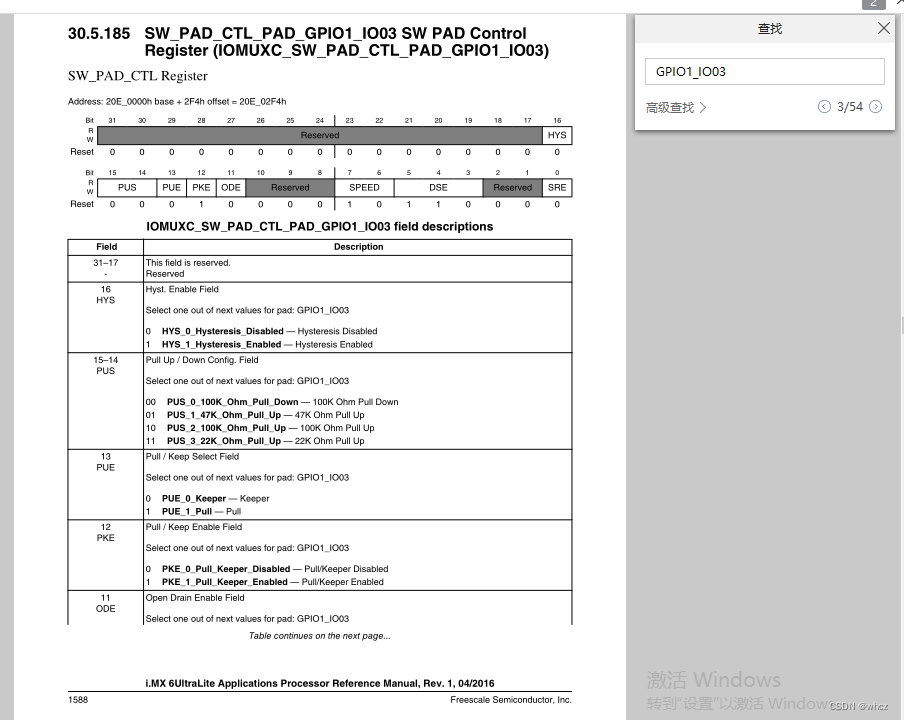
Pinctrl/Gpio简介(以应用层角度修改设备树)
1.先举个例子
1 、添加 pinctrl 节点 iomuxc 节点就是 I.MX6ULL 的 IOMUXC 外设对应的节点 imx6ull.dtsi
iomuxc: iomuxc020e0000 {compatible "fsl,imx6ul-iomuxc";reg <0x020e0000 0x4000>;
}imx6ull.dts 根节点下
gpioled {#address-cells <1>;…

深入业务场景的数据使用安全管控实践
《数据安全法》第三条对数据安全给出了明确的定义:“数据处理包括数据的收集、存储、使用、加工、传输、提供、公开等。数据安全是指通过采取必要措施,确保数据处于有效保护和合法利用的状态,以及具备保障持续安全状态的能力。” 数据随着业…

Python 学到什么程度才可以去找工作?掌握这 4 点足够了!
大家在学习Python的时候,有人会问“Python要学到什么程度才能出去找工作”,对于在Python培训机构学习Python的同学来说这都不是问题,因为按照Python课程大纲来,一般都不会有什么问题,而对于自学Python来说,…

【2023B题】人工智能对大学生学习影响的评价(思路、代码)
目录 💥1 概述 📚2 Matlab代码实现 🎉3 参考文献 🌈4 运行结果 💥1 概述
人工智能简称AI,最初由麦卡锡、明斯基等科学家于1956年在美国达特茅斯学院开会研讨时提出。
2016年,人工智能AlphaGo …
【day 06】vue的组件
组件 组件就是把一个网页分割成独立的小的模块,然后通过把模块进行组合,构建成一个大型的应用 单文件组件 只有一个组件 html css js 都在这个文件内
非单文件组件 可有多个组件
全局注册
!! 得先注册子组件 再生成 vm实例对象
创建子组件
const …
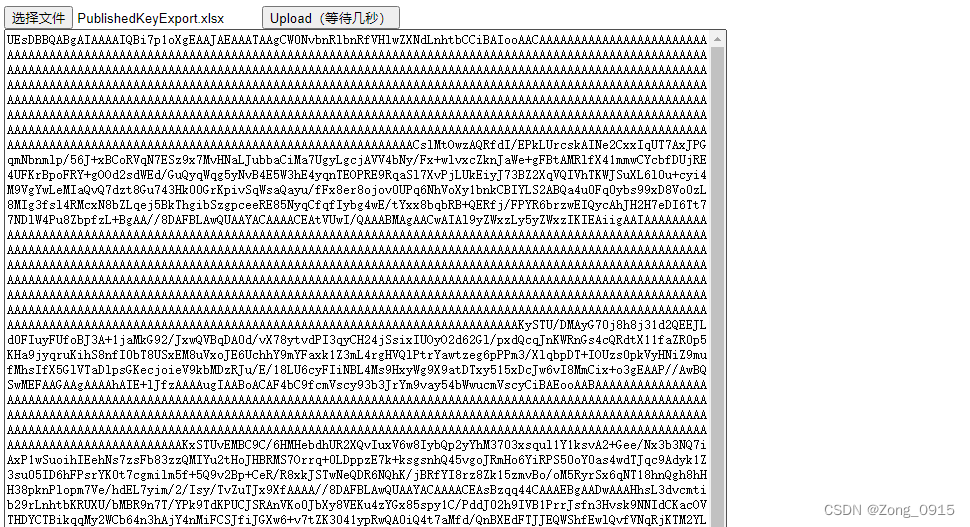
JS - 写一个简单的静态页面支持上传文件并转Base64编码
JS - 写一个简单的静态页面支持上传文件并转Base64编码 前言静态页面代码 前言
我后端有一个上传文件并判断其文件类型的功能,我希望拿不同的文件流进行测试,但是文件的请求体又得获得。拿来作为参数传递。因此写了个静态文件去获取。
静态页面代码
&…
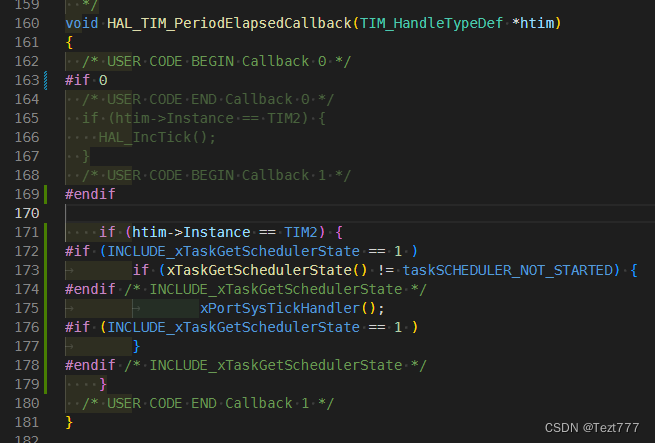
STM32用CUBEMx生成工程, 不使用CMSIS, 自己移植freertos
目录 完整工程代码:
零. 参考
一. 外围配置
二, 放进来freertos源代码
三.修改makefile
四. 解决修改函数重定义报错
五. 让Freertos的systick工作起来
六. 验证 完整工程代码:
https://download.csdn.net/download/u011493332/87821404 零. 参考
正在入门…