1、简述
很多项目已经转向ROS2,本人作为ROS小白从ROS1开始学起,但是不会深入学习ROS1,只一带而过。
下面只了解一些ROS1中的概念和基本编程接口。
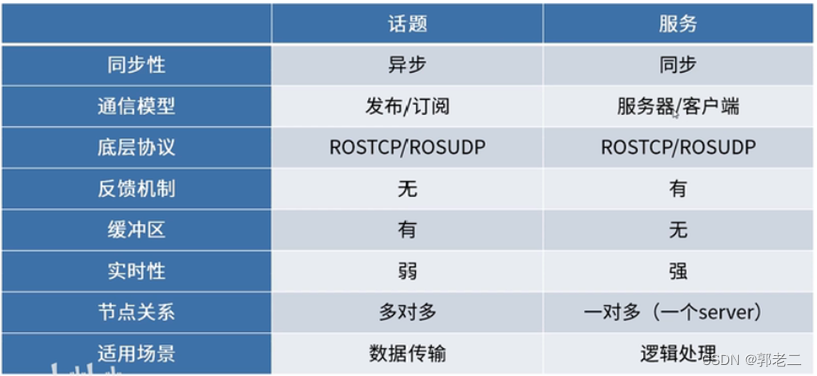
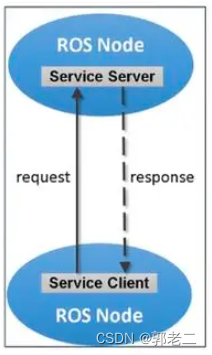
ROS1中有两种通信模式:话题模式和服务模式,区别如下
2、话题模式
2.1 查看话题和消息
1)列出所有话题:rostopic list
~/workspace/ros$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
2)查看话题详细信息:rostopic info
和下面发布编程相关的话题:
~/workspace/ros$ rostopic info /turtle1/cmd_vel
Type: geometry_msgs/Twist
Subscribers:
* /turtlesim (http://laoer:43127/)
和下面订阅编程相关的话题:
$ rostopic info /turtle1/pose
Type: turtlesim/Pose
Publishers:
* /turtlesim (http://laoer:43127/)
3)查看消息详细信息:rosmsg show
和下面发布编程相关的消息:
~/workspace/ros$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
对应程序中的代码:
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
和下面订阅编程相关的消息:
~/workspace/ros$ rosmsg show turtlesim/Pose
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
2.2、发布者
1)进入ROS1的工程目录
cd ~/workspace/ros/src/
2)创建功能包
~/workspace/ros/src$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
输出信息如下:
Created file learning_topic/CMakeLists.txt
Created file learning_topic/package.xml
Created folder learning_topic/include/learning_topic
Created folder learning_topic/src
Successfully created files in /home/laoer/workspace/ros/src/learning_topic. Please adjust the values in package.xml.
3)编辑源码
cd ~/workspace/ros
vi src/learning_topic/src/velocity_publisher.cpp
源码如下:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
4)修改CMakeLists.txt
~/workspace/ros$ vi src/learning_topic/CMakeLists.txt
添加需要编译生成的可执行文件规则和连接库
在## Build ##下添加
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
5)编译
catkin_make
编译输出:
Base path: /home/laoer/workspace/ros
……
-- +++ processing catkin package: 'learning_topic'
-- ==> add_subdirectory(learning_topic)
……
[100%] Built target velocity_publisher
6)运行
在终端1中启动节点管理器:
roscore
在终端2中启动小乌龟节点:
rosrun turtlesim turtlesim_node
在终端3中先配置环境变量:
~/workspace/ros$ source devel/setup.bash
再启动发布者
~/workspace/ros$ rosrun learning_topic velocity_publisher
输出信息如下:
[ INFO] [1684324440.780789684]: Publsh turtle velocity command[0.50 m/s, 0.20 rad/s]
[ INFO] [1684324440.880933087]: Publsh turtle velocity command[0.50 m/s, 0.20 rad/s]
[ INFO] [1684324440.980945586]: Publsh turtle velocity command[0.50 m/s, 0.20 rad/s]
小乌龟将做圆形运动

2.3、订阅者
1)进入ROS1的工程目录
cd ~/workspace/ros/src/
2)创建功能包
已经创建过learning_topic,不需要再创建
~/workspace/ros/src$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
如果重复创建,将会输出如下信息,提示文件已存在:
catkin_create_pkg: error: File exists: /home/laoer/workspace/ros/src/learning_topic/CMakeLists.txt
3)编辑源码
cd ~/workspace/ros
vi src/learning_topic/src/pose_subscriber.cpp
#include <ros/ros.h>
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
4)修改CMakeLists.txt
~/workspace/ros$ vi src/learning_topic/CMakeLists.txt
添加需要编译生成的可执行文件规则和连接库
在## Build ##下添加
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
5)编译
catkin_make
编译输出:
Base path: /home/laoer/workspace/ros
……
[100%] Built target pose_subscriber
6)运行
在终端1中启动节点管理器:
roscore
在终端2中启动小乌龟节点:
rosrun turtlesim turtlesim_node
在终端3中先配置环境变量:
~/workspace/ros$ source devel/setup.bash
再启动订阅者
~/workspace/ros$ rosrun learning_topic pose_subscriber
输出信息如下:
[ INFO] [1684373591.045027979]: Turtle pose: x:7.060666, y:10.029119
[ INFO] [1684373591.061111496]: Turtle pose: x:7.060666, y:10.029119
此时位置信息没有变化,可以运行2.1中发布者来改变位置信息
在终端4中先配置环境变量:
~/workspace/ros$ source devel/setup.bash
再启动发布者
~/workspace/ros$ rosrun learning_topic velocity_publisher
在终端3中可以看到位置信息已改变
[ INFO] [1684373649.013267506]: Turtle pose: x:3.651149, y:9.681684
[ INFO] [1684373649.028763094]: Turtle pose: x:3.645919, y:9.675630
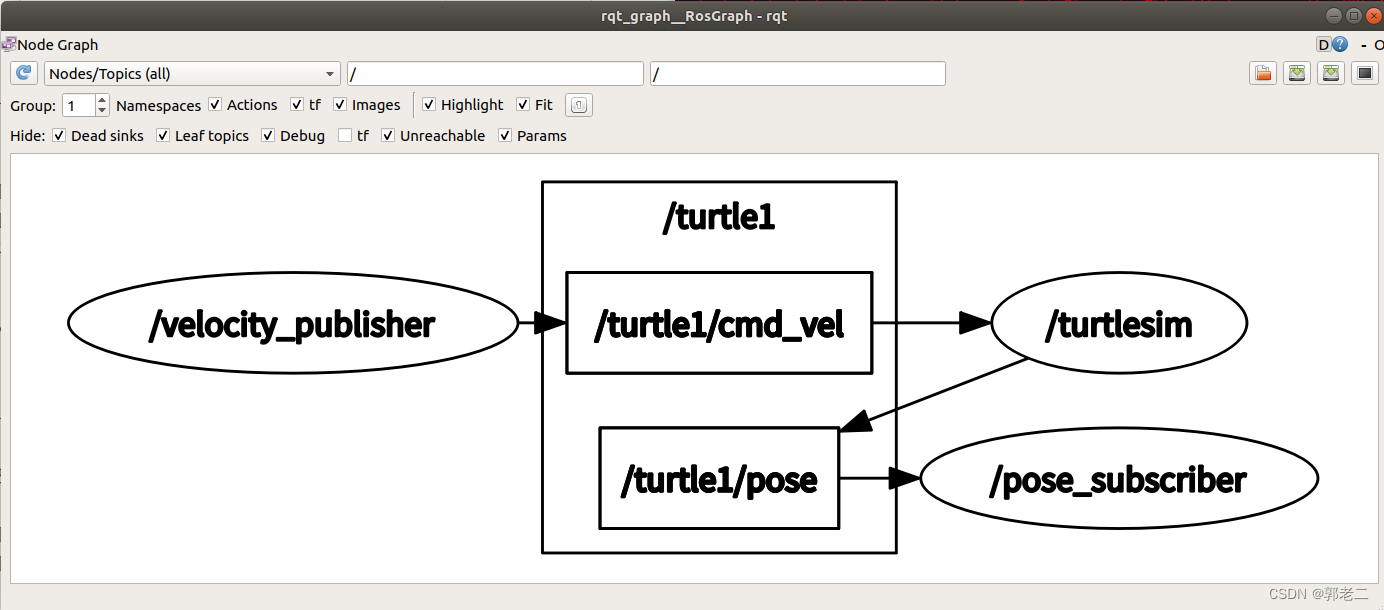
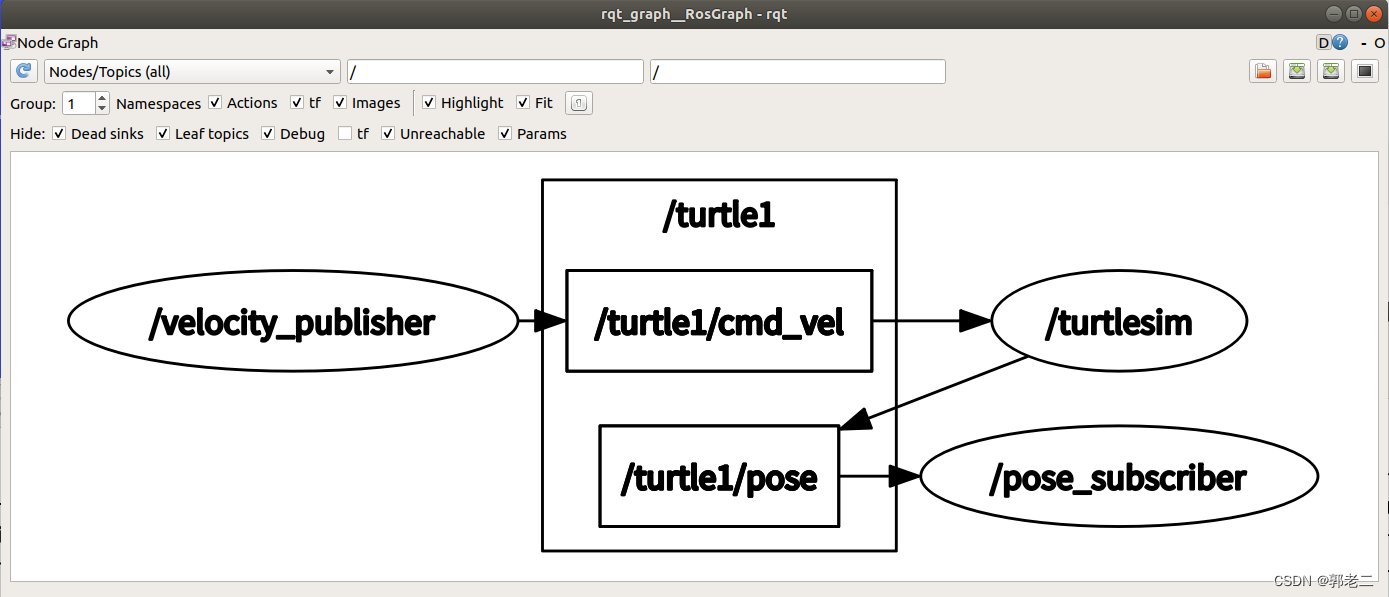
2.4 节点结构
可以使用rqt_graph来打印当前的节点结构
2.5、话题消息
上面发布者和订阅者的示例中,都使用的是已经定义好的信息,如:
~/workspace/ros$ rosmsg show turtlesim/Pose
float32 x
float32 y
float32 theta
float32 linear_velocity
float32 angular_velocity
下面演示如何自定义话题信息
1)定义msg文件
进入话题工程目录
~/workspace/ros$ cd src/learning_topic/
创建保存消息文件的文件夹
~/workspace/ros/src/learning_topic$ mkdir msg
创建消息文件Person.msg
~/workspace/ros/src/learning_topic$ vi Person.msg
内容如下:
string name
uint8 age
uint8 sex
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
2)在package.xml中添加功能包依赖
在编译自定义消息时,需要依赖消息生成的依赖包:message_generation
在运行自定义消息时,需要依赖运行的依赖包:message_runtime
修改package.xml,将关于message_generation和message_runtime注释打开即可
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
3)C++代码
订阅者相关代码
~/workspace/ros$ vi src/learning_topic/src/person_subscriber.cpp
#include <ros/ros.h>
#include "learning_topic/Person.h"
// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_topic::Person::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d",
msg->name.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "person_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
发布者相关代码:
~/workspace/ros$ vi src/learning_topic/src/person_publisher.cpp
#include <ros/ros.h>
#include "learning_topic/Person.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "person_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
ros::Publisher person_info_pub = n.advertise<learning_topic::Person>("/person_info", 10);
// 设置循环的频率
ros::Rate loop_rate(1);
int count = 0;
while (ros::ok())
{
// 初始化learning_topic::Person类型的消息
learning_topic::Person person_msg;
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = learning_topic::Person::male;
// 发布消息
person_info_pub.publish(person_msg);
ROS_INFO("Publish Person Info: name:%s age:%d sex:%d",
person_msg.name.c_str(), person_msg.age, person_msg.sex);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
4)在CMakeLists.txt中添加编译选项
find_package(catkin REQUIRED COMPONENTS
……
message_generation
)
add_message_files(
FILES
Person.msg
)
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs turtlesim message_runtime
)
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
5)编译
~/workspace/ros$ catkin_make
……
[ 46%] Generating Javascript code from learning_topic/Person.msg
[ 93%] Built target person_publisher
[100%] Built target person_subscriber
6)运行
在终端1中启动节点管理器:
~/workspace/ros$ roscore
在终端2中启动订阅者:
~/workspace/ros$ source devel/setup.bash
~/workspace/ros$ rosrun learning_topic person_subscriber
在终端3中启动发布者:
~/workspace/ros$ source devel/setup.bash
~/workspace/ros$ rosrun learning_topic person_publisher
终端2打印订阅者收到的信息:
[ INFO] [1684377584.196850906]: Subcribe Person Info: name:Tom age:18 sex:1
[ INFO] [1684377585.196714423]: Subcribe Person Info: name:Tom age:18 sex:1
终端3打印发布者发送的信息:
[ INFO] [1684377583.196183979]: Publish Person Info: name:Tom age:18 sex:1
[ INFO] [1684377584.196358219]: Publish Person Info: name:Tom age:18 sex:1
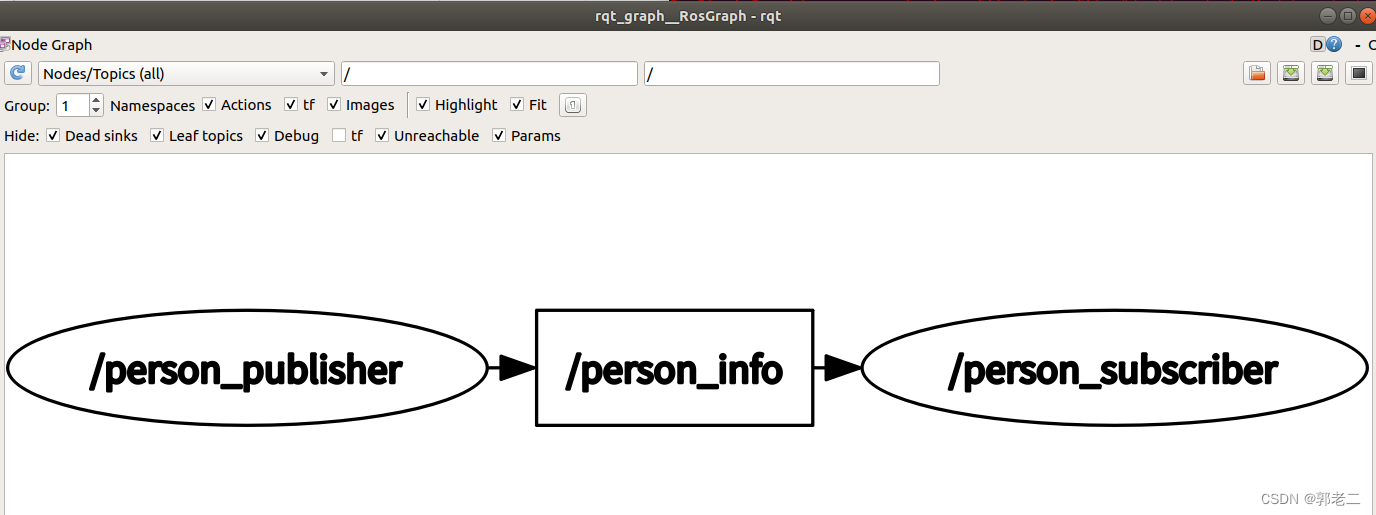
7)节点图很简单,如下:
3、服务模式
3.1 查看服务和数据
1)列出所有的服务
~/workspace/ros$ rosservice list
/clear
……
/spawn
……
2)查看服务(spawn产卵,即在界面中生成一个新的小乌龟)
~/workspace/ros$ rosservice info /spawn
Node: /turtlesim
URI: rosrpc://lesen-System-Product-Name:54203
Type: turtlesim/Spawn
Args: x y theta name
3)调用服务命令 rosservice call
下面的客户端示例的功能和这个命令类似,调用服务多产生几个小乌龟
~/workspace/ros$ rosservice call /spawn 3 7 8 haha

3.2、客户端
~/workspace/ros$ rosservice call /spawn 3 3 4 hah
1)进入ROS1的工程目录
cd ~/workspace/ros/src/
2)创建功能包
~/workspace/ros/src$ catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
3)编辑源码
~/workspace/ros/src/learning_service/src$ vi turtle_spawn.cpp
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
4)修改CMakeLists.txt
添加需要编译生成的可执行文件规则和连接库
在## Build ##下添加
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})
5)编译
~/workspace/ros$ catkin_make
编译输出信息
[ 100%] Built target turtle_spawn
6)运行
在终端1中启动节点管理器:
~/workspace/ros$ roscore
在终端2中启动小乌龟:
rosrun turtlesim turtlesim_node
在终端3中启动客户端
~/workspace/ros$ source devel/setup.bash
~/workspace/ros$ rosrun learning_service turtle_spawn
输出信息如下:
[ INFO] [1684380205.381761081]: Call service to spwan turtle[x:2.000000, y:2.000000, name:turtle2]
[ INFO] [1684380205.401406453]: Spwan turtle successfully [name:turtle2]
在小乌龟界面将会出现两个小乌龟

3.3、服务端
1)进入ROS1的工程目录
cd ~/workspace/ros/src/
2)创建功能包
学习服务模式的功能包已经创建,这里不需要再运行
~/workspace/ros/src$ catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
3)编辑源码
~/workspace/ros/src/learning_service/src$ vi turtle_command_server.cpp
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <std_srvs/Trigger.h>
ros::Publisher turtle_vel_pub;
bool pubCommand = false;
// service回调函数,输入参数req,输出参数res
bool commandCallback(std_srvs::Trigger::Request &req,
std_srvs::Trigger::Response &res)
{
pubCommand = !pubCommand;
// 显示请求数据
ROS_INFO("Publish turtle velocity command [%s]", pubCommand==true?"Yes":"No");
// 设置反馈数据
res.success = true;
res.message = "Change turtle command state!"
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "turtle_command_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为/turtle_command的server,注册回调函数commandCallback
ros::ServiceServer command_service = n.advertiseService("/turtle_command", commandCallback);
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 循环等待回调函数
ROS_INFO("Ready to receive turtle command.");
// 设置循环的频率
ros::Rate loop_rate(10);
while(ros::ok())
{
// 查看一次回调函数队列
ros::spinOnce();
// 如果标志为true,则发布速度指令
if(pubCommand)
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
}
//按照循环频率延时
loop_rate.sleep();
}
return 0;
}
4)修改CMakeLists.txt
添加需要编译生成的可执行文件规则和连接库
在## Build ##下添加
add_executable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES})
5)编译
~/workspace/ros$ catkin_make
编译输出信息
……
[ 100%] Built target turtle_command_server
6)运行
在终端1中启动节点管理器:
~/workspace/ros$ roscore
在终端2中启动小乌龟:
rosrun turtlesim turtlesim_node
在终端3中启动服务器
~/workspace/ros$ source devel/setup.bash
~/workspace/ros$ rosrun learning_service turtle_spawn
在终端4中使用rosservice call来调用服务
rosservice call /turtle_command
终端3中的打印信息
[ INFO] [1684395192.110521550]: Ready to receive turtle command.
[ INFO] [1684395203.911182038]: Publish turtle velocity command [Yes]
[ INFO] [1684395245.311201634]: Publish turtle velocity command [No]
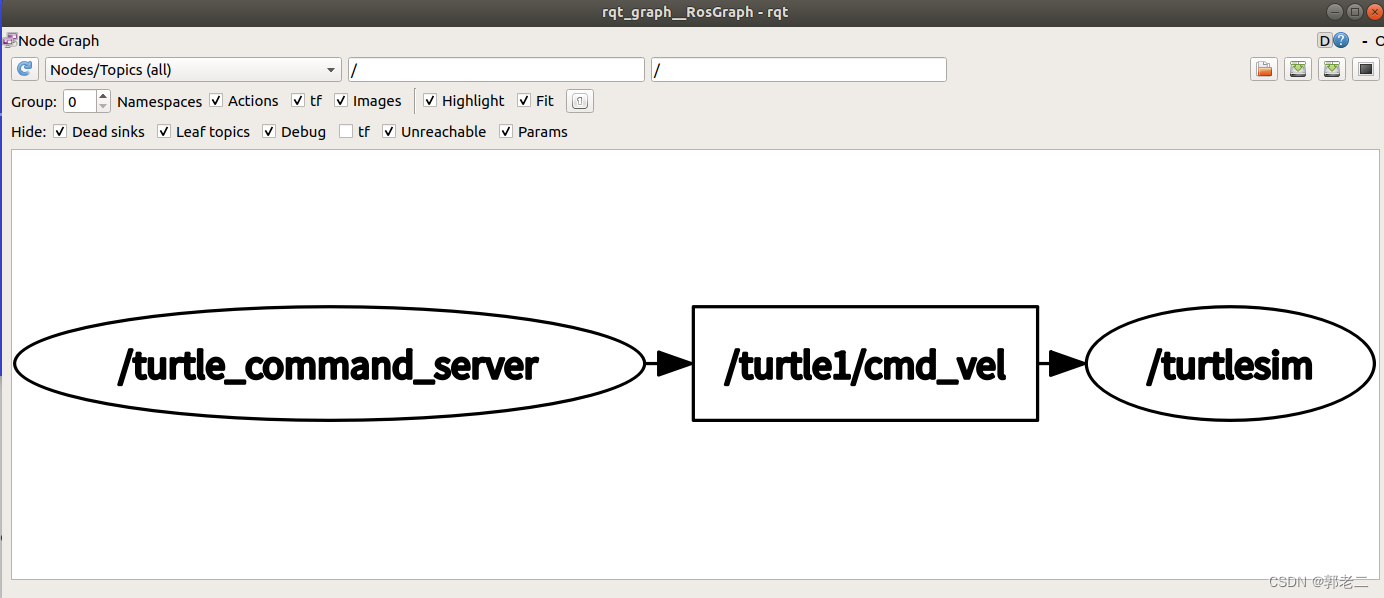
流程说明:
执行命令后将调用服务turtle_command,然后执行对应的回调函数,回调函数只控制pubCommand的真假值,主循环会根据pubCommand的真假来决定是否发布消息
注:小乌龟的运动是最终还是通过发布者Publisher,发布名为/turtle1/cmd_vel的主题topic,消息类型为控制小乌龟运动的消息geometry_msgs::Twist
节点关系如下:
3.4、自定义服务数据
3.4.1 定义服务数据
创建描述服务数据的srv文件
1)进入包目录
进入~/workspace/ros/src/learning_service中
cd ~/workspace/ros/src/learning_service
2)创建保存服务数据文件的目录srv
~/workspace/ros/src/learning_service$ mkdir srv
3)编辑服务数据文件Person.srv
~/workspace/ros/src/learning_service$ vi srv/Person.srv
内容如下,注意“—”不是省略号,是数据文件格式的一部分
string name
uint8 age
uint8 sex
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
---
string result
4)在package.xml中添加功能包依赖
(和话题模式的自定义消息类似)
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
5)在CMakeLists.txt中添加编译选项
(和话题模式的自定义消息类似)
find_package(catkin REQUIRED COMPONENTS
……
message_generation
)
add_service_files(
FILES
Person.srv
)
generate_messages(
DEPENDENCIES
std_msgs
)
catkin_package(
CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs turtlesim message_runtime
)
3.4.2 服务端
编辑服务端代码
~/workspace/ros/src/learning_service$ vi src/person_server.cpp
#include <ros/ros.h>
#include "learning_service/Person.h"
// service回调函数,输入参数req,输出参数res
bool personCallback(learning_service::Person::Request &req,
learning_service::Person::Response &res)
{
// 显示请求数据
ROS_INFO("Person: name:%s age:%d sex:%d", req.name.c_str(), req.age, req.sex);
// 设置反馈数据
res.result = "OK";
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "person_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为/show_person的server,注册回调函数personCallback
ros::ServiceServer person_service = n.advertiseService("/show_person", personCallback);
// 循环等待回调函数
ROS_INFO("Ready to show person informtion.");
ros::spin();
return 0;
}
3.4.3 客户端
编辑客户端代码
~/workspace/ros/src/learning_service$ vi src/person_client.cpp
#include <ros/ros.h>
#include "learning_service/Person.h"
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "person_client");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/show_person");
ros::ServiceClient person_client = node.serviceClient<learning_service::Person>("/show_person");
// 初始化learning_service::Person的请求数据
learning_service::Person srv;
srv.request.name = "Tom";
srv.request.age = 20;
srv.request.sex = learning_service::Person::Request::male;
// 请求服务调用
ROS_INFO("Call service to show person[name:%s, age:%d, sex:%d]",
srv.request.name.c_str(), srv.request.age, srv.request.sex);
person_client.call(srv);
// 显示服务调用结果
ROS_INFO("Show person result : %s", srv.response.result.c_str());
return 0;
};
3.4.4 编译
1)在CMakeLists.txt中添加服务端、客户端相关的编译规则
add_executable(person_server src/person_server.cpp)
target_link_libraries(person_server ${catkin_LIBRARIES})
add_dependencies(person_server ${PROJECT_NAME}_gencpp)
add_executable(person_client src/person_client.cpp)
target_link_libraries(person_client ${catkin_LIBRARIES})
add_dependencies(person_client ${PROJECT_NAME}_gencpp)
2)编译
~/workspace/ros$ catkin_make
编译输出
[ 80%] Built target person_server
[100%] Built target person_client
3.4.5 运行
在终端1中启动服务器:
~/workspace/ros$ rosrun learning_service person_server
在终端2中多次执行客户端,命令及打印信息如下:
~/workspace/ros$ rosrun learning_service person_client
[ INFO] [1684397359.830399671]: Call service to show person[name:Tom, age:20, sex:1]
[ INFO] [1684397359.831655045]: Show person result : OK
~/workspace/ros$ rosrun learning_service person_client
[ INFO] [1684397360.439275903]: Call service to show person[name:Tom, age:20, sex:1]
[ INFO] [1684397360.440764700]: Show person result : OK
终端1收到的信息如下:
[ INFO] [1684397334.962962627]: Ready to show person informtion.
[ INFO] [1684397351.231455028]: Person: name:Tom age:20 sex:1
[ INFO] [1684397358.320771056]: Person: name:Tom age:20 sex:1
[ INFO] [1684397359.144605775]: Person: name:Tom age:20 sex:1
4、参数
ROS 参 数( parameters )机制用于获取任何节点保存在参数服务器中的信息,类似全局变量。
方法是使用集中参数服务器( parameter server )维护一个变量集的值,包括整数、浮点数、字符串以及其他数据类型,每一个变量用一个较短的字符串标识 。由于允许节点主动查询其感兴趣的参数的值,它们适用于配置那些不会随时间频繁变更的信息。
4.1 rosparam
操作参数的命令
- rosparam set,设置参数
- rosparam get,获取参数
- rosparam load,从文件中加载参数
- rosparam dump,将参数写入文件
- rosparam delete,删除参数
- rosparam list,列出所有的参数
示例1:列出所有的参数
~/workspace/ros$ rosparam list
输出:
/rosdistro
/roslaunch/uris/host_lesen_system_product_name__46275
/rosversion
/run_id
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
示例2:查看某个参数的值
~/workspace/ros$ rosparam get /turtlesim/background_b
输出:
255
4.2 自定义参数文件
1)进入ROS1的工程目录
cd ~/workspace/ros/src/
2)创建功能包
~/workspace/ros/src$ catkin_create_pkg learning_parameter roscpp rospy std_msgs geometry_msgs turtlesim
3)进入功能包目录
cd ~/workspace/ros/src/learning_parameter
4)创建保存参数文件的目录
mkdir config
5)编辑参数文件
~/workspace/ros/src/learning_parameter$ vi config/turtle_param.yaml
background_b: 255
background_g: 86
background_r: 69
rosdistro: 'melodic'
roslaunch:
uris: {host_hcx_vpc__43763: 'http://hcx-vpc:43763/'}
rosversion: '1.14.3'
run_id: 077058de-a38b-11e9-818b-000c29d22e4d
4.3 参数操作示例
1)编辑源码
~/workspace/ros/src/learning_parameter$ vi src/parameter_config.cpp
注意:古月居的示例源码中background_r需要改为/turtlesim/background_r否则小乌龟不会改变背景色
ros::param::get("/turtlesim/background_r", red);
#include <string>
#include <ros/ros.h>
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{
int red, green, blue;
// ROS节点初始化
ros::init(argc, argv, "parameter_config");
// 创建节点句柄
ros::NodeHandle node;
// 读取背景颜色参数
ros::param::get("/turtlesim/background_r", red);
ros::param::get("/turtlesim/background_g", green);
ros::param::get("/turtlesim/background_b", blue);
ROS_INFO("Get Backgroud Color[%d, %d, %d]", red, green, blue);
// 设置背景颜色参数
ros::param::set("/turtlesim/background_r", 255);
ros::param::set("/turtlesim/background_g", 255);
ros::param::set("/turtlesim/background_b", 255);
ROS_INFO("Set Backgroud Color[255, 255, 255]");
// 读取背景颜色参数
ros::param::get("/turtlesim/background_r", red);
ros::param::get("/turtlesim/background_g", green);
ros::param::get("/turtlesim/background_b", blue);
ROS_INFO("Re-get Backgroud Color[%d, %d, %d]", red, green, blue);
// 调用服务,刷新背景颜色
ros::service::waitForService("/clear");
ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");
std_srvs::Empty srv;
clear_background.call(srv);
sleep(1);
return 0;
}
2)编译
~/workspace/ros$ catkin_make
输出:
[ 100%] Built target parameter_config
3) 运行
在终端1中启动节点管理器
roscore
在终端2中启动小乌龟
rosrun turtlesim turtlesim_node
在终端3中启动参数测试程序
~/workspace/ros$ source devel/setup.bash
~/workspace/ros$ rosrun learning_parameter parameter_config
打印输出:
[ INFO] [1684400198.204756094]: Get Backgroud Color[0, 14, -2147483648]
[ INFO] [1684400198.206004077]: Set Backgroud Color[255, 255, 255]
[ INFO] [1684400198.206633529]: Re-get Backgroud Color[255, 255, 255]
[ INFO] [1684400198.206846322]: waitForService: Service [/clear] has not been advertised, waiting...
5、坐标
5.1 命令示例
1)安装ros-melodic-turtle-tf
以小乌龟的坐标变换为例,需要先安装一个软件
$ sudo apt install ros-melodic-turtle-tf
2)终端1运行节点管理器
$ roscore
3)终端2运行两个小乌龟自动跟随的demo
$ roslaunch turtle_tf turtle_tf_demo.launch
4)终端3运行键盘控制节点
$ rosrun turtlesim turtle_teleop_key
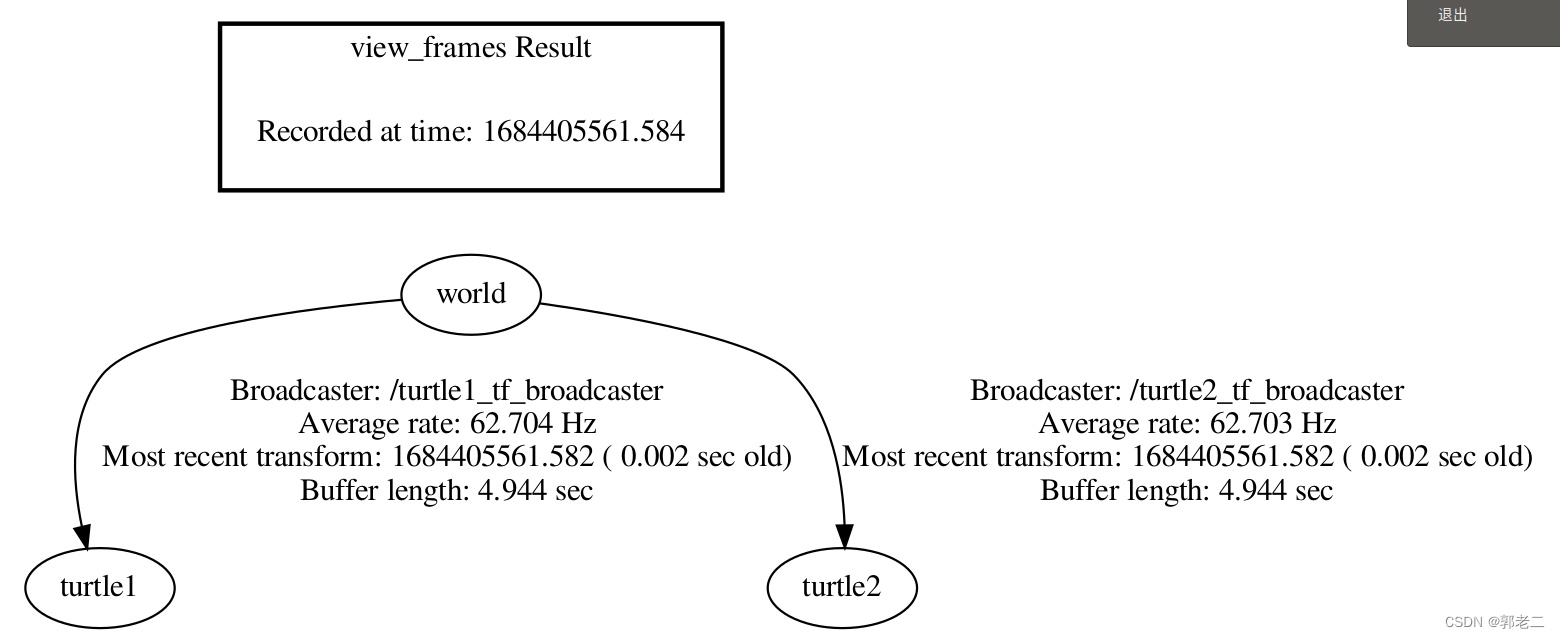
5)坐标树查看
$ rosrun tf view_frames
输出信息
Listening to /tf for 5.0 seconds
Done Listening
dot - graphviz version 2.40.1 (20161225.0304)
Detected dot version 2.40
frames.pdf generated
在当前目录下生成文件frames.pdf
6)坐标变换
$ rosrun tf tf_echo turtle1 turtle2
输出
At time 1684405017.779
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.979, 0.205]
in RPY (radian) [-0.000, -0.000, 2.728]
in RPY (degree) [-0.000, -0.000, 156.306]
At time 1684405018.514
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.979, 0.205]
in RPY (radian) [-0.000, -0.000, 2.728]
in RPY (degree) [-0.000, -0.000, 156.306]
……
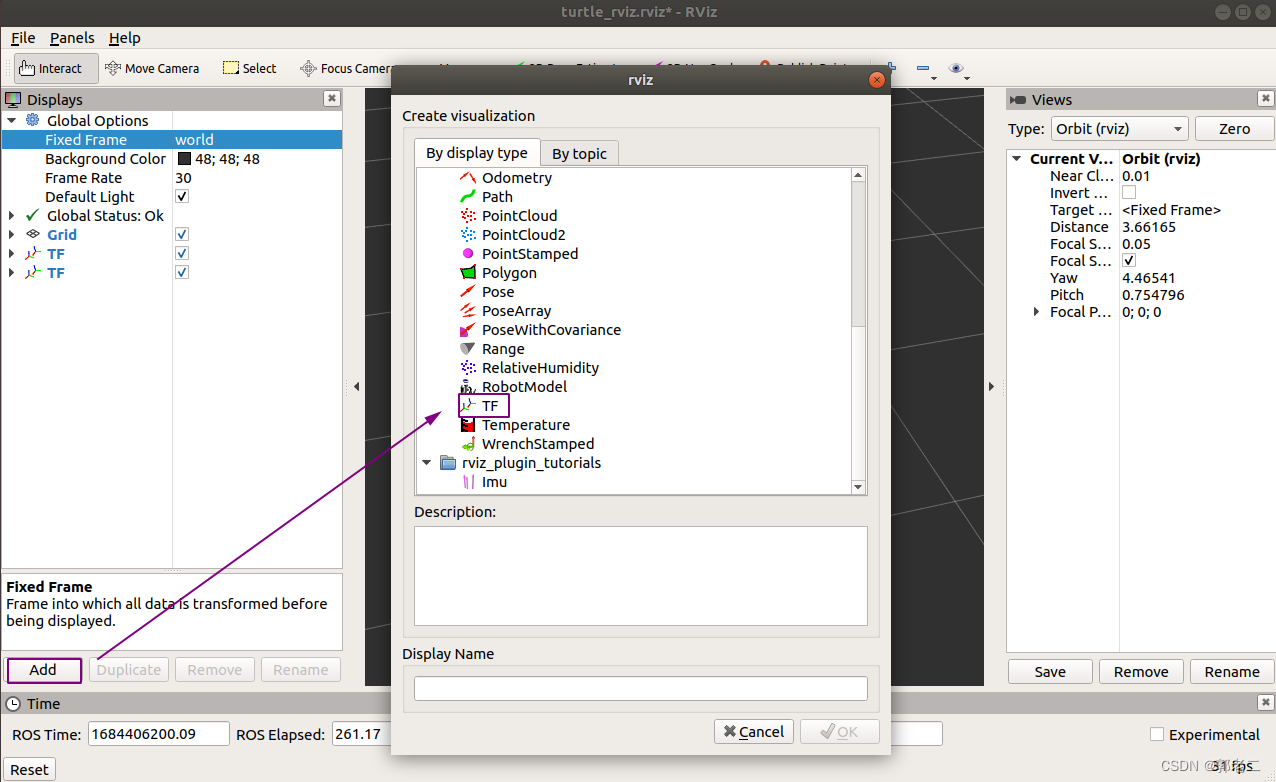
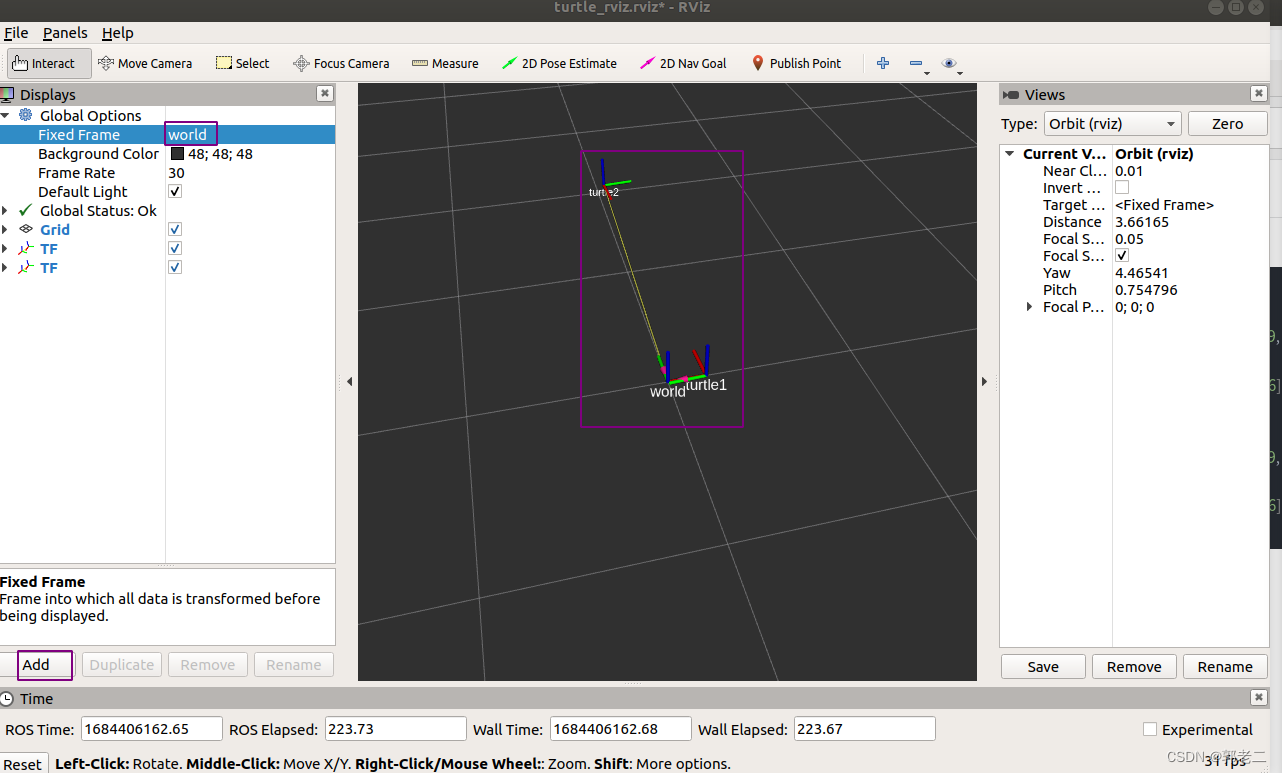
7)rviz可视化工具查看坐标
$ rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz
5.2 代码示例
1)进入ROS1的工程目录
cd ~/workspace/ros/src/
2)创建功能包
~/workspace/ros/src$ catkin_create_pkg learning_tf roscpp rospy tf turtlesim
3)编辑源码
tf广播器:
~/workspace/ros/src/learning_tf/src$ vi turtle_tf_broadcaster.cpp
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建tf的广播器
static tf::TransformBroadcaster br;
// 初始化tf数据
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 广播world与海龟坐标系之间的tf数据
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_broadcaster");
// 输入参数作为海龟的名字
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
// 订阅海龟的位姿话题
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
};
tf监听器:
~/workspace/ros/src/learning_tf/src$ cat turtle_tf_listener.cpp
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_listener");
// 创建节点句柄
ros::NodeHandle node;
// 请求产生turtle2
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
// 创建tf的监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
// 获取turtle1与turtle2坐标系之间的tf数据
tf::StampedTransform transform;
try
{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
4)配置CMakeLists.txt
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
5)编译
cd ~/workspace/ros
~/workspace/ros$ catkin_make
6)运行
终端1运行节点管理器
$ roscore
终端2运行小乌龟
$ rosrun turtlesim turtlesim_node
终端3运行广播1
$ rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
终端4运行广播2
$ rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
终端5运行监听
$ rosrun learning_tf turtle_tf_listener
终端6运行键盘控制
$ rosrun turtlesim turtle_teleop_key
7)效果
效果和命令示例一样
6、launch批量启动节点
6.1 说明
roslaunch可以实现自动启动ROS Master、通过XML文件实现多个节点的配置和启动
6.2 创建launch功能包
1)进入ROS1的工程目录
cd ~/workspace/ros/src/
2)创建功能包
~/workspace/ros/src$ catkin_create_pkg learning_launch
6.3 launch文件格式
roslaunch需要加载XML文件来读取各个节点,格式如下:
<launch>
<node pkg="learning_topic" type="person_subscriber" name="talker" output="screen" />
<node pkg="learning_topic" type="person_publisher" name="listener" output="screen" />
</launch>
1)launch:根元素
2)node:节点
pkg:节点所在的功能包名称
type:可执行文件名称
name:执行程序运行时的名称
output:打印输出
3)include:launch文件嵌套
6.4 执行命令
~/workspace/ros$ roslaunch learning_launch simple.launch
输出:
……
NODES
/
listener (learning_topic/person_publisher)
talker (learning_topic/person_subscriber)
ROS_MASTER_URI=http://localhost:11311
process[talker-1]: started with pid [6649]
process[listener-2]: started with pid [6655]
[ INFO] [1684408582.094373243]: Publish Person Info: name:Tom age:18 sex:1
[ INFO] [1684408583.094561611]: Publish Person Info: name:Tom age:18 sex:1
[ INFO] [1684408583.095011334]: Subcribe Person Info: name:Tom age:18 sex:1
[ INFO] [1684408584.094552704]: Publish Person Info: name:Tom age:18 sex:1
[ INFO] [1684408584.094849697]: Subcribe Person Info: name:Tom age:18 sex:1
7、可视化工具
7.1 rqt:rqt系列工具集
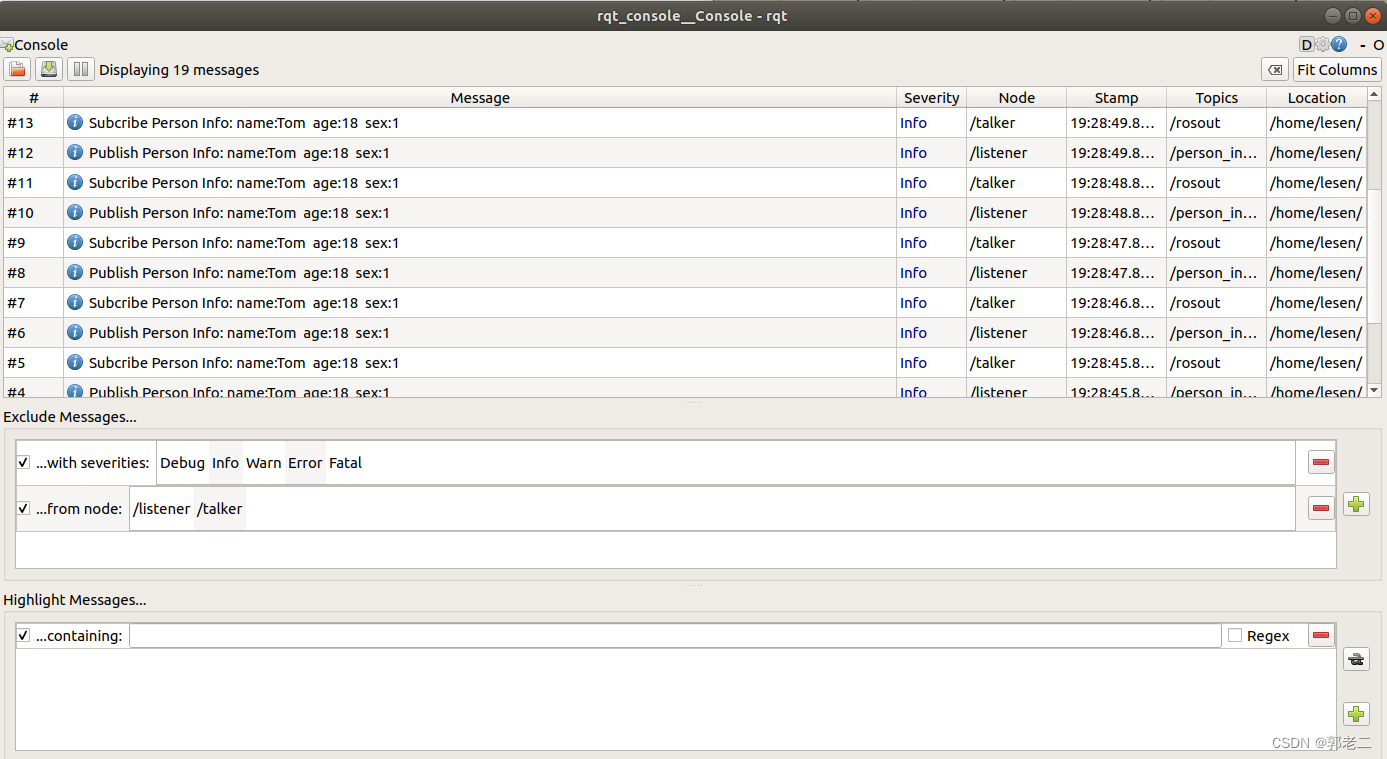
7.1 rqt_console:日志输出工具
7.2 rqt_graph:节点图
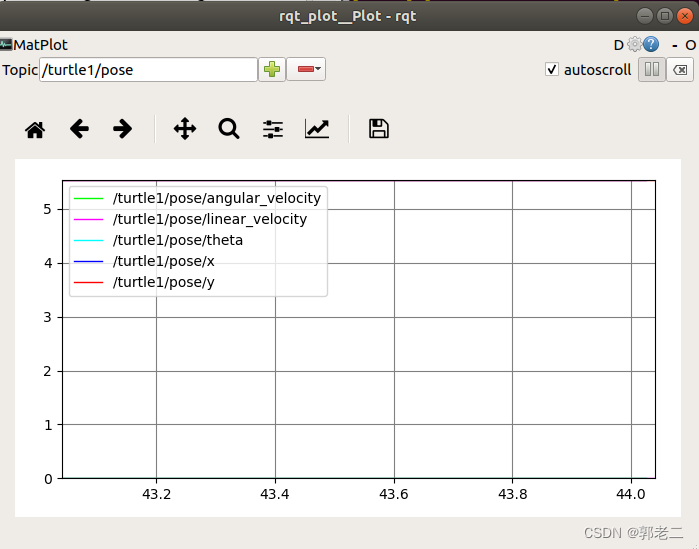
7.3 rqt_plot:数据绘制
7.4 rqt_image_view:图像渲染工具
不知道怎么安装
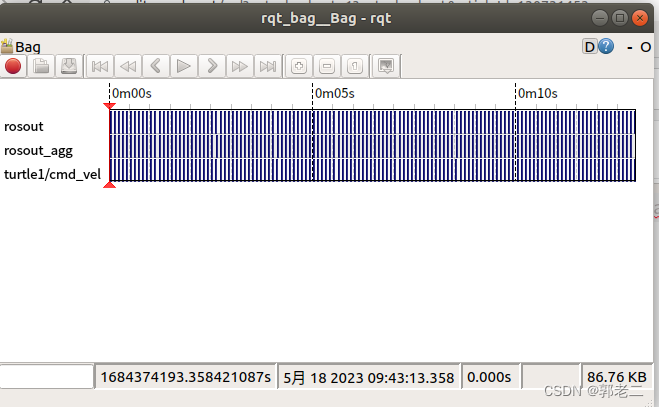
7.5 rqt_bag
7.6 Rviz:三维可视化工具
7.7 Gazebo:三维物理仿真平台
7.8 rqt_shell终端
rqt_shell
7.9 rqt_multiplot:可视化多个2D图中的数值
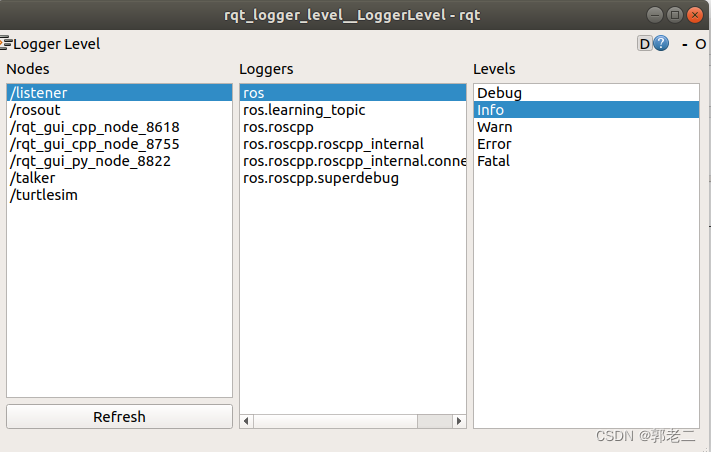
7.10 rqt_logger_level:配置 ROS 节点的日志级别
7.11 rqt_paramedit:编辑参数服务
7.12 rqt_py_trees:可视化py_trees行为树
行为树:用来让机器人实现复杂任务
7.13 rqt_dep:查看ROS包依赖