1. 引言
毫米波(mmWave)是一种特殊的雷达技术,它使用短波长的电磁波。雷达系统发射电磁波信号,然后其路径上的物体将它反射回去。通过捕捉反射信号,雷达系统可以确定目标的距离、速度和角度。毫米波雷达发射的信号波长在毫米范围内。这被认为是电磁波谱中的短波长,是该技术的优点之一。实际上,处理毫米波信号所需的天线等系统组件的尺寸很小。短波长的另一个优点是精度高。工作在 76-81 GHz(相应波长约为 4 毫米)的毫米波系统将能够检测到小到 1 毫米的运动。一个完整的毫米波雷达系统包括发射(TX)和接收(RX)射频(RF)组件;如时钟这样的模拟元件;如模数转换器(ADC)、微控制器(MCU)和数字信号处理器(DSP)这样的数字元件。以前,这些系统采用离散元件实现,这增加了功耗和整体系统成本。由于系统的复杂性和高频率,系统设计具有挑战性。Texas Instruments (TI) 已经解决了这些挑战,并设计了基于互补金属氧化物半导体(CMOS)的毫米波雷达器件,该器件集成了 TX-RF 和 RX-RF 、模拟组件(如时钟)以及数字组件(如 ADC、MCU 和硬件加速器)。TI 毫米波传感器产品组合中的一些系列集成了 DSP ,来提供额外的信号处理功能。TI 实现了一种特殊的毫米波技术,称为调频连续波(FMCW)。顾名思义, FMCW 雷达连续发射调频信号,以测量距离、角度和速度。这与传统的脉冲雷达系统不同,后者周期性地发射短脉冲。
2. 测距
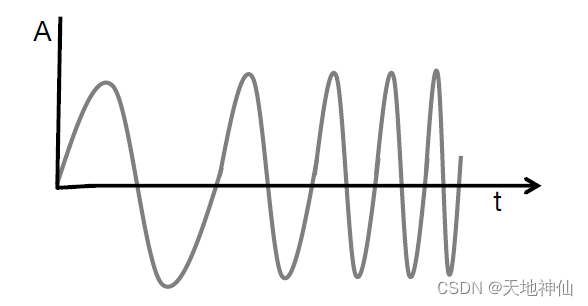
雷达系统的基本概念是物体在其路径上反射的电磁信号的传输。在 FMCW 雷达使用的信号中,频率随时间线性增加。这种类型的信号也被称为 chirp (线性调频)。下图显示了 chirp 信号的表示,其幅度是时间的函数。
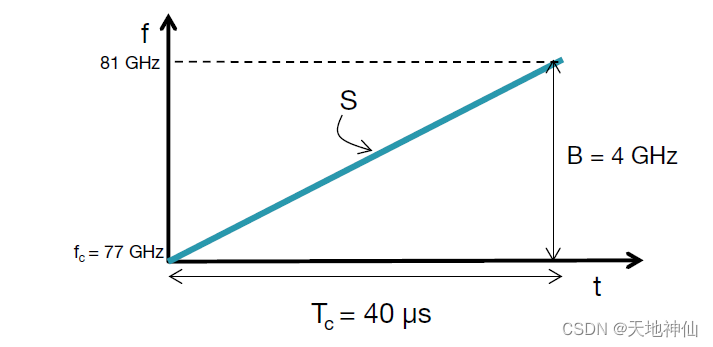
下图也显示了 chirp ,频率是时间的函数。chirp 的特征是起始频率(fc),带宽(B)和持续时间(Tc)。chirp 的斜率(S)捕获频率的变化率。其中 fc = 77 GHz, B = 4 GHz, Tc = 40 μs, S = 100 MHz/μs
FMCW 雷达系统发送 chirp 信号并捕获其路径上物体反射的信号。
下图是FMCW雷达主要射频组件的简化框图。
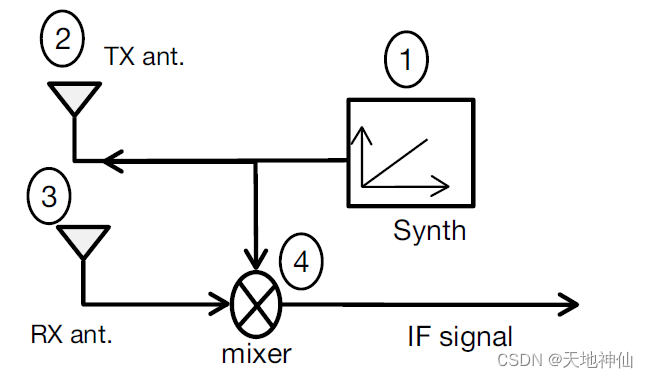
雷达的工作原理如下:
- 合成器产生 chirp
- chirp 由发射天线(TX ant)发射出去
- 物体对 chirp 的反射产生被接收天线捕获的反射 chirp (RX ant)
- 混频器(mixer)结合 RX 和 TX 信号产生中频(IF)信号
频率混频器是一种电子元件,它将两个信号组合在一起,产生一个具有新频率的新信号
![Prompt工程师指南[从基础到进阶篇]:用于开发和优化提示,以有效地使用语言模型(LMs)进行各种应用和研究主题](https://img-blog.csdnimg.cn/img_convert/ed258197ba9c79ff2534a8eff66e28da.png)


![[GXYCTF2019]BabyUpload1](https://img-blog.csdnimg.cn/img_convert/53399c8c116f415182edad129448e1e7.png)