目录
- 包结构
- op_global_planner
- op_global_planner_core.cpp中代码的主要逻辑
- op_local_planner
- op_trajectory_generator
- op_behavior_selector
- op_common_params
- op_motion_predictor
- op_trajectory_evaluator
本篇主要对Open Planner的代码进行分析,主要包括op_global_planner和op_local_planner两个package。
在阅读本文时,应先参照前面两篇关于Autoware即Open Planner的文章。如下列所示:
【Autoware】Autoware人机交互工具Runtime_Manager分析及使用教程
【论文阅读】Open Source Integrated Planner for Autonomous Navigation in Highly Dynamic Environments
【Autoware】OpenPlanner使用教程–从RuntimeManager面板
通过上述文章,能够使用runtime manager并在上面运行open planner的程序,且对相关的原理有一定的理解。建议结合论文一起看。
然后再阅读本文,如果只想看源码结构,也可以不看前面的。
包结构
Open Planner包含四个包,op_global_planner、op_local_planner、op_simulation_package、op_utilities。
- op_global_planner包含一个node,名称也是op_global_planner。
- op_local_planner包含的node多一些,有五个,分别是op_behavior_selector,op_common_params,op_motion_predictor,op_trajectory_evaluator,op_trajectory_generator,每个node对应一个launch文件,在同一个包的对应文件夹下。
- op_simulation_package包含三个node,分别是op_car_simulator、op_perception_simulator、op_signs_simulator。
- op_utilities包含三个node,op_bag_player、op_data_logger、op_pose2tf。
基本上每一个node都有一个对应的和node同名的主文件和一个core cpp文件。
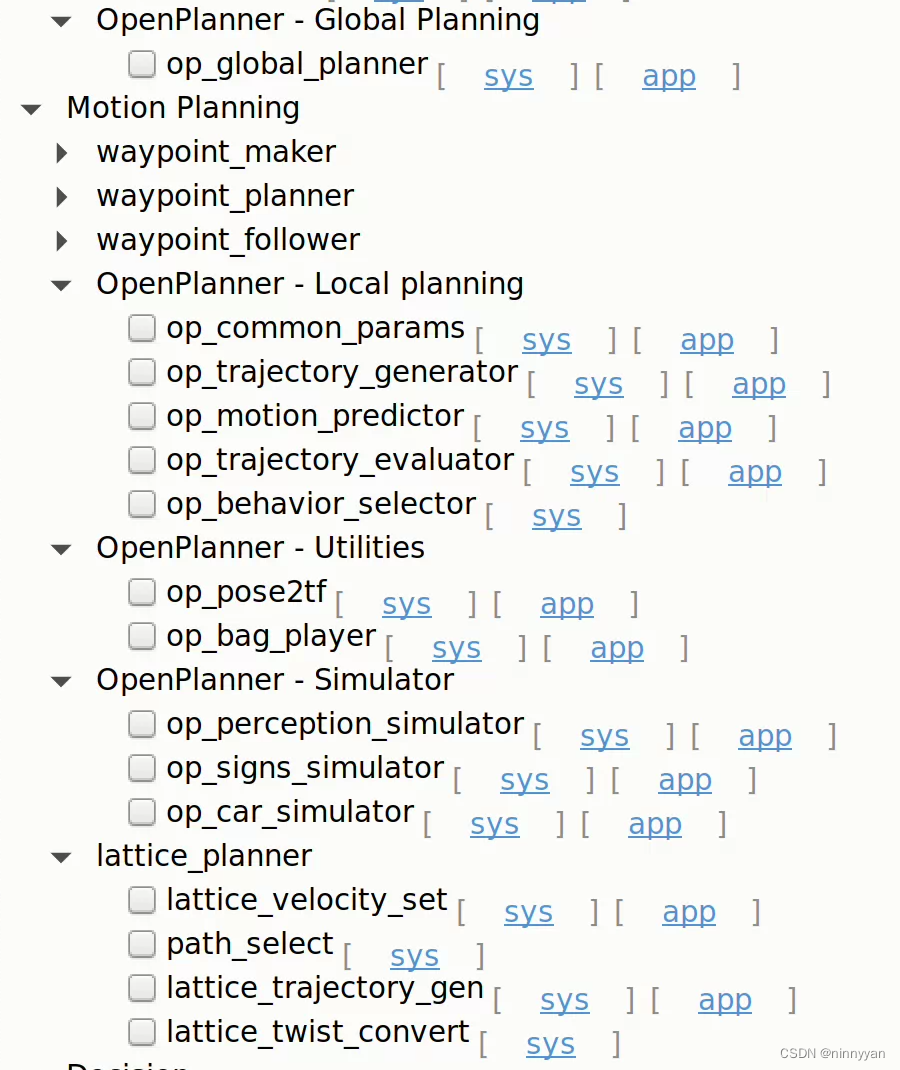
实际上这里就对应了Runtime Manager面板中复选框可以选择的内容,除了op_data_logger包之外。意味着每在runtime_manager中选择一个package的复选框,即为启动该package,效用等同于运行
$ roslaunch <package_name> <launch_file> # 这是roslaunch的语法
比如Computing Tab页中,可以在对应的computing.yaml配置文件中可以看到如下描述
- name : OpenPlanner - Local planning
desc : Local Planner for OpenPlanner
subs :
- name : op_common_params
desc : load common local planning parameters
cmd : roslaunch op_local_planner op_common_params.launch
param: op_common_params
gui :
dialog_width : 600
dialog_height : 550
op_common_params对应的cmd就是roslaunch op_local_planner op_common_params.launch
op_global_planner
输入输出在ROS中主要以topic的方式进行,op_global_planner订阅和发布的topic分别是:
构造函数中订阅:
sub_start_pose = nh.subscribe("/initialpose", 1, &GlobalPlanner::callbackGetStartPose, this);
sub_goal_pose = nh.subscribe("move_base_simple/goal", 1, &GlobalPlanner::callbackGetGoalPose, this);
sub_current_pose = nh.subscribe("/current_pose", 10, &GlobalPlanner::callbackGetCurrentPose, this);
// 下面三个是if-else关系,三选一
sub_robot_odom = nh.subscribe("/odom", 10, &TrajectoryGen::callbackGetRobotOdom, this);
sub_current_velocity = nh.subscribe("/current_velocity", 10, &TrajectoryGen::callbackGetVehicleStatus, this);
sub_can_info = nh.subscribe("/can_info", 10, &TrajectoryGen::callbackGetCANInfo, this);
//Mapping Section
sub_lanes = nh.subscribe("/vector_map_info/lane", 1, &BehaviorGen::callbackGetVMLanes, this);
sub_points = nh.subscribe("/vector_map_info/point", 1, &BehaviorGen::callbackGetVMPoints, this);
sub_dt_lanes = nh.subscribe("/vector_map_info/dtlane", 1, &BehaviorGen::callbackGetVMdtLanes, this);
sub_intersect = nh.subscribe("/vector_map_info/cross_road", 1, &BehaviorGen::callbackGetVMIntersections, this);
sup_area = nh.subscribe("/vector_map_info/area", 1, &BehaviorGen::callbackGetVMAreas, this);
sub_lines = nh.subscribe("/vector_map_info/line", 1, &BehaviorGen::callbackGetVMLines, this);
sub_stop_line = nh.subscribe("/vector_map_info/stop_line", 1, &BehaviorGen::callbackGetVMStopLines, this);
sub_signals = nh.subscribe("/vector_map_info/signal", 1, &BehaviorGen::callbackGetVMSignal, this);
sub_vectors = nh.subscribe("/vector_map_info/vector", 1, &BehaviorGen::callbackGetVMVectors, this);
sub_curbs = nh.subscribe("/vector_map_info/curb", 1, &BehaviorGen::callbackGetVMCurbs, this);
sub_edges = nh.subscribe("/vector_map_info/road_edge", 1, &BehaviorGen::callbackGetVMRoadEdges, this);
sub_way_areas = nh.subscribe("/vector_map_info/way_area", 1, &BehaviorGen::callbackGetVMWayAreas, this);
sub_cross_walk = nh.subscribe("/vector_map_info/cross_walk", 1, &BehaviorGen::callbackGetVMCrossWalks, this);
sub_nodes = nh.subscribe("/vector_map_info/node", 1, &BehaviorGen::callbackGetVMNodes, this);
发布的topic包括:
pub_Paths = nh.advertise<autoware_msgs::LaneArray>("lane_waypoints_array", 1, true);
pub_PathsRviz = nh.advertise<visualization_msgs::MarkerArray>("global_waypoints_rviz", 1, true);
pub_MapRviz = nh.advertise<visualization_msgs::MarkerArray>("vector_map_center_lines_rviz", 1, true);
pub_GoalsListRviz = nh.advertise<visualization_msgs::MarkerArray>("op_destinations_rviz", 1, true);
左侧是c++中定义的变量名,存储数据,右侧为topic的名称,可以在rviz中添加显示。
其中nh为nodehandle句柄。advertise函数是ros中定义的用来BasePublisher类下面的发布function。
op_global_planner_core.cpp中代码的主要逻辑
主要的业务逻辑在MainLoop()函数中,
-
支持三种地图格式,分别为
MAP_KML_FILE,MAP_FOLDER,MAP_AUTOWARE
这几个参数是从launch配置文件中读取的,其代表的含义分别为kml格式的google地图文件,地图文件夹中的文件,autoware自定义格式的文件。 -
生成全局路径的函数为
GenerateGlobalPlan,调用方法为
bool bNewPlan = GenerateGlobalPlan(m_CurrentPose, goalPoint, m_GeneratedTotalPaths);
生成的路径存储在m_GeneratedTotalPaths参数中,然后调用VisualizeAndSend()将数据可视化,发布到对应的topic中以使其在rviz中显示
pub_GoalsListRviz.publish(goals_array);
其中goals_array变量的类型为visualization_msgs::MarkerArray goals_array;。
m_GeneratedTotalPaths的变量类型如下,定义在op_global_planner_core.h文件中,属于protected类型的变量
std::vector<std::vector<PlannerHNS::WayPoint> > m_GeneratedTotalPaths;
op_local_planner
分别有5个node,每个node之间的流程如下图所示:
op_trajectory_generator
主要的业务逻辑依然是在MainLoop函数里面
- 订阅的topic包括
sub_initialpose = nh.subscribe("/initialpose", 1, &TrajectoryGen::callbackGetInitPose, this);
sub_current_pose = nh.subscribe("/current_pose", 10, &TrajectoryGen::callbackGetCurrentPose, this);
sub_GlobalPlannerPaths = nh.subscribe("/lane_waypoints_array", 1, &TrajectoryGen::callbackGetGlobalPlannerPath, this);//global_planner输出的topic
//依然的三选一,默认值是current_velocity
"/odom";"/current_velocity";"/can_info"
- 生成rollOuts的方法
std::vector<PlannerHNS::WayPoint> sampledPoints_debug;
m_Planner.GenerateRunoffTrajectory(m_GlobalPathSections, m_CurrentPos,
m_PlanningParams.enableLaneChange,
m_VehicleStatus.speed,
m_PlanningParams.microPlanDistance,
m_PlanningParams.maxSpeed,
m_PlanningParams.minSpeed,
m_PlanningParams.carTipMargin,
m_PlanningParams.rollInMargin,
m_PlanningParams.rollInSpeedFactor,
m_PlanningParams.pathDensity,
m_PlanningParams.rollOutDensity,
m_PlanningParams.rollOutNumber,
m_PlanningParams.smoothingDataWeight,
m_PlanningParams.smoothingSmoothWeight,
m_PlanningParams.smoothingToleranceError,
m_PlanningParams.speedProfileFactor,
m_PlanningParams.enableHeadingSmoothing,
-1 , -1,
m_RollOuts, sampledPoints_debug);
调用的是PlannerH.cpp里面的GenerateRunoffTrajectory()函数。
其中返回的m_RollOuts是rollOutsPaths,里面包含了多条local_rollOutPaths
rollOutsPaths.push_back(local_rollOutPaths);
生成之后,通过TrajectoriesToMarkers函数将rollouts转换成marker以在rviz中显示,进而publish
visualization_msgs::MarkerArray all_rollOuts;
PlannerHNS::ROSHelpers::TrajectoriesToMarkers(m_RollOuts, all_rollOuts);
pub_LocalTrajectoriesRviz.publish(all_rollOuts);
- 发布的topic
pub_LocalTrajectories = nh.advertise<autoware_msgs::LaneArray>("local_trajectories", 1);//作为op_trajectory_evaluator的订阅
pub_LocalTrajectoriesRviz = nh.advertise<visualization_msgs::MarkerArray>("local_trajectories_gen_rviz", 1);
op_behavior_selector
同样的主要业务逻辑在MainLoop里面
- 订阅的topic
sub_current_pose = nh.subscribe("/current_pose", 10, &BehaviorGen::callbackGetCurrentPose, this);//必选项
//传统三选一,默认值是current_velocity
"/odom";"/current_velocity";"/can_info"
//
sub_GlobalPlannerPaths = nh.subscribe("/lane_waypoints_array", 1, &BehaviorGen::callbackGetGlobalPlannerPath, this);//global_planner输出的topic
sub_LocalPlannerPaths = nh.subscribe("/local_weighted_trajectories", 1, &BehaviorGen::callbackGetLocalPlannerPath, this);
sub_TrafficLightStatus = nh.subscribe("/light_color", 1, &BehaviorGen::callbackGetTrafficLightStatus, this);
sub_TrafficLightSignals = nh.subscribe("/roi_signal", 1, &BehaviorGen::callbackGetTrafficLightSignals, this);
sub_Trajectory_Cost = nh.subscribe("/local_trajectory_cost", 1, &BehaviorGen::callbackGetLocalTrajectoryCost, this);
sub_twist_raw = nh.subscribe("/twist_raw", 1, &BehaviorGen::callbackGetTwistRaw, this);
sub_twist_cmd = nh.subscribe("/twist_cmd", 1, &BehaviorGen::callbackGetTwistCMD, this);
//Mapping Section
//...这部分同上
- 发布的topic
pub_LocalPath = nh.advertise<autoware_msgs::Lane>("final_waypoints", 1,true);
pub_LocalBasePath = nh.advertise<autoware_msgs::Lane>("base_waypoints", 1,true);
pub_ClosestIndex = nh.advertise<std_msgs::Int32>("closest_waypoint", 1,true);
pub_BehaviorState = nh.advertise<geometry_msgs::TwistStamped>("current_behavior", 1);//作为op_trajectory_evaluator的订阅
pub_SimuBoxPose = nh.advertise<geometry_msgs::PoseArray>("sim_box_pose_ego", 1);
pub_BehaviorStateRviz = nh.advertise<visualization_msgs::MarkerArray>("behavior_state", 1);
pub_SelectedPathRviz = nh.advertise<visualization_msgs::MarkerArray>("local_selected_trajectory_rviz", 1);
op_common_params
op_motion_predictor
- 订阅的topic
sub_StepSignal = nh.subscribe("/pred_step_signal",1,&MotionPrediction::callbackGetStepForwardSignals,this);
sub_tracked_objects = nh.subscribe("/tracked_objects",1,&MotionPrediction::callbackGetTrackedObjects,this);
sub_current_pose = nh.subscribe("/current_pose", 10,&MotionPrediction::callbackGetCurrentPose,this);
//依然的三选一,默认值是current_velocity
"/odom";"/current_velocity";"/can_info"
//Mapping Section
//...这部分同上
- 业务逻辑
- 发布的topic
pub_predicted_objects_trajectories = nh.advertise<autoware_msgs::DetectedObjectArray>("/predicted_objects", 1);//作为op_trajectory_evaluator的订阅
pub_PredictedTrajectoriesRviz = nh.advertise<visualization_msgs::MarkerArray>("/predicted_trajectories_rviz", 1);
pub_CurbsRviz = nh.advertise<visualization_msgs::MarkerArray>("/map_curbs_rviz", 1);
pub_ParticlesRviz = nh.advertise<visualization_msgs::MarkerArray>("prediction_particles", 1);
op_trajectory_evaluator
- 订阅的topic
//老生常谈项
sub_current_pose = nh.subscribe("/current_pose", 10, &TrajectoryEval::callbackGetCurrentPose, this);
//经典三选一,默认值是current_velocity
"/odom";"/current_velocity";"/can_info";
//其他的
sub_GlobalPlannerPaths = nh.subscribe("/lane_waypoints_array", 1, &TrajectoryEval::callbackGetGlobalPlannerPath, this);//global_planner的输出
sub_LocalPlannerPaths = nh.subscribe("/local_trajectories", 1, &TrajectoryEval::callbackGetLocalPlannerPath, this);//op_trajectory_generator的输出
sub_predicted_objects = nh.subscribe("/predicted_objects", 1, &TrajectoryEval::callbackGetPredictedObjects, this);//op_motion_predictor的输出
sub_current_behavior = nh.subscribe("/current_behavior", 1, &TrajectoryEval::callbackGetBehaviorState, this);//op_behavior_selector的输出
- 业务逻辑
- 发布的topic
pub_CollisionPointsRviz = nh.advertise<visualization_msgs::MarkerArray>("dynamic_collision_points_rviz", 1);
pub_LocalWeightedTrajectoriesRviz = nh.advertise<visualization_msgs::MarkerArray>("local_trajectories_eval_rviz", 1);
pub_LocalWeightedTrajectories = nh.advertise<autoware_msgs::LaneArray>("local_weighted_trajectories", 1);
pub_TrajectoryCost = nh.advertise<autoware_msgs::Lane>("local_trajectory_cost", 1);
pub_SafetyBorderRviz = nh.advertise<visualization_msgs::Marker>("safety_border", 1);





![基于.NET实现的家电维修保养信息系统[含文档+PPT+源码等]精品](https://img-blog.csdnimg.cn/img_convert/aa44cf5dd296e9053e96f10d9c8cfe88.png)