目录
前言
一、FOC简介
1、概述
2、框图详解
二、FOC控制核心—坐标变换
1、CLARKE变换
2、PARK变换&反变换
三、FOC闭环回路
四、SVPWM解析
总结
前言
声明:学习笔记来自正点原子B站教程,根据自己理解进行精简总结,仅供学习交流!!
一、FOC简介
1、概述
FOC( Field Oriented Control )直译即磁场定向控制,又称为磁场矢量控制(VC,Vector Control),特点:通过精确地控制磁场大小与方向,使得电机的运动转矩平稳、噪声小、效率高,并且具有高速的动态响应。

之前介绍直流无刷电机时用的时六步换相法(左),磁场每次旋转60°,对于机械臂等领域这样太不精确,所以使用FOC(右),可控制每一相的电流强度实现360°无死角的磁场方向合成。两者具体对比如下:
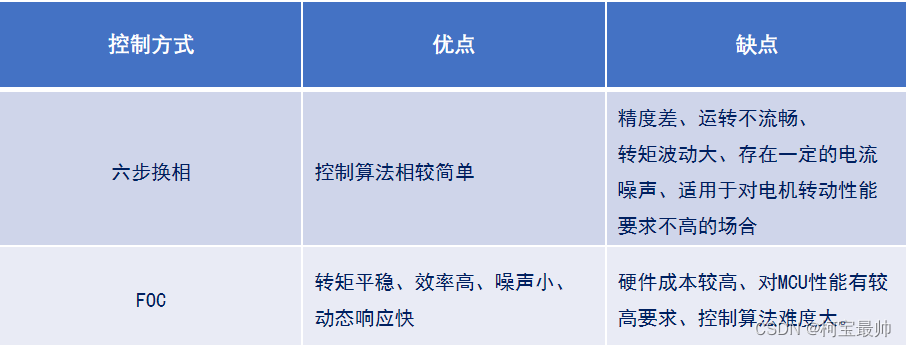
注意:虽然FOC法常用于直流无刷电机中的PMSM永磁同步电机,但BLDC同样可以使用FOC的方式进行控制。
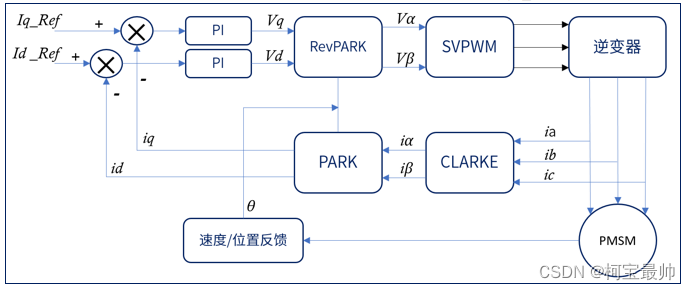
2、框图详解
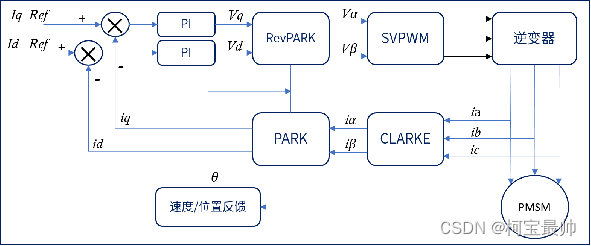
PI即PID控制,只不过这里只用到P和I;逆变器即之前直流无刷电机中的三相逆变电路,通过三个半桥控制电机。
首先对电机三相电流进行采样得到:ia、ib、ic;然后将ia、ib、ic经过clarke变换得到iα、iβ;将iα、iβ经过park变换得到iq、id;计算iq、id和其设定值iq_Ref、id_Ref的误差;将上述误差输入到两个PID(只用到PI)控制器,得到输出的控制电压Vq 、 Vd;将Vq 、 Vd进行反park变换得到Vα、Vβ;将Vα、Vβ合成电压空间矢量,输入SVPWM模块进行调制,输出该时刻三个半桥的开关状态。
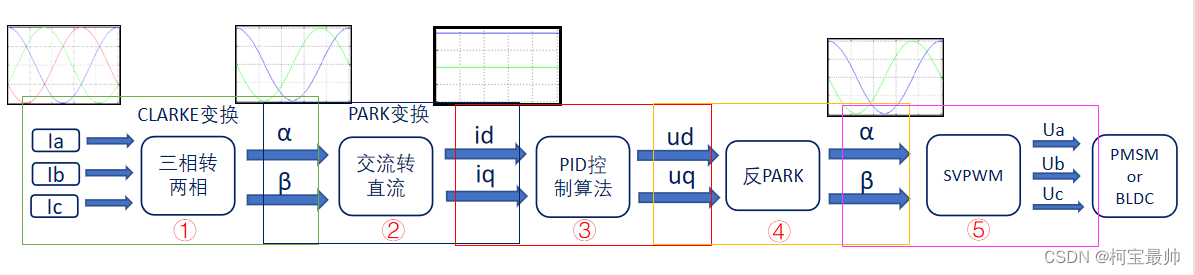
clarke和park变换是为了变为线性好处理分析, 之所以最后还要反变换是因为SVPWM调制算法需要用到α、β。
二、FOC控制核心—坐标变换
坐标变换包含CLARKE变换、PARK变换、反PARK变换。
1、CLARKE变换
三相电路计算困难,将三相等效成二相,变换原则是电流产生的磁场相等(即等效变换)。思路是将三相电流A、B、C投射到直角坐标系转换为两相α、β。三相电流一般只需测出两相就可由KCL得出另一相。
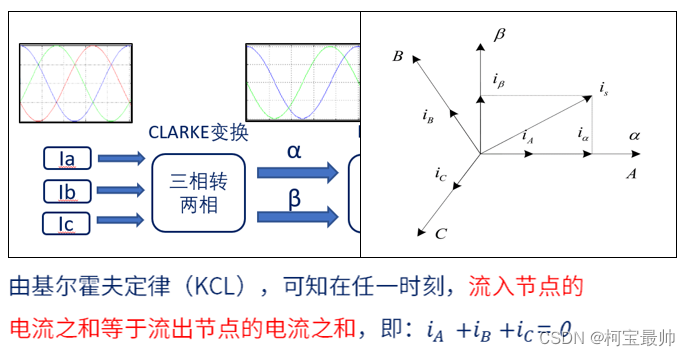

虽然α与β坐标系下少了一维变量,但是新的变量还是非线性的(正弦),只有想办法变换为线性的才利于控制,这就需要park变换。
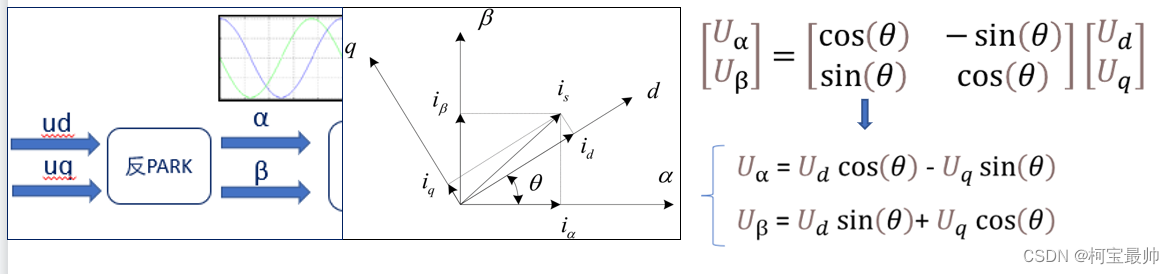
2、PARK变换&反变换
Park变换可以将电机从两相静止坐标系变换到随转子转动的坐标系(dq轴)。d轴方向与转子内磁场方向重合,称为直轴;q轴方向与转子内磁场方向垂直,称为交轴。
 其中θ为转子旋转的角度(可通过霍尔/编码器测出)。d - q 坐标系是始终跟着转子旋转的,Id和Iq是恒定不变的两个值,这个坐标系下两个控制量都被线性化了。线性化后要经过PID控制算法,输出后还要进行反PARK变换,因为SVPWM算法的实现需要用到静止的坐标系α,β。
其中θ为转子旋转的角度(可通过霍尔/编码器测出)。d - q 坐标系是始终跟着转子旋转的,Id和Iq是恒定不变的两个值,这个坐标系下两个控制量都被线性化了。线性化后要经过PID控制算法,输出后还要进行反PARK变换,因为SVPWM算法的实现需要用到静止的坐标系α,β。
三、FOC闭环回路
电流环:
①通过电流反馈来控制电机电流(扭矩)②控制电机的转速 ③控制电机位置。实际只用到了PI控制,没有引入微分,因为电流的采样率非常高不需要加入微分项。

iq是我们需要的(驱动有关),代表了期望的力矩输出。id是我们不需要的(只会增大电流让电机发热),希望尽可能把它控制为0。
速度+电流环:
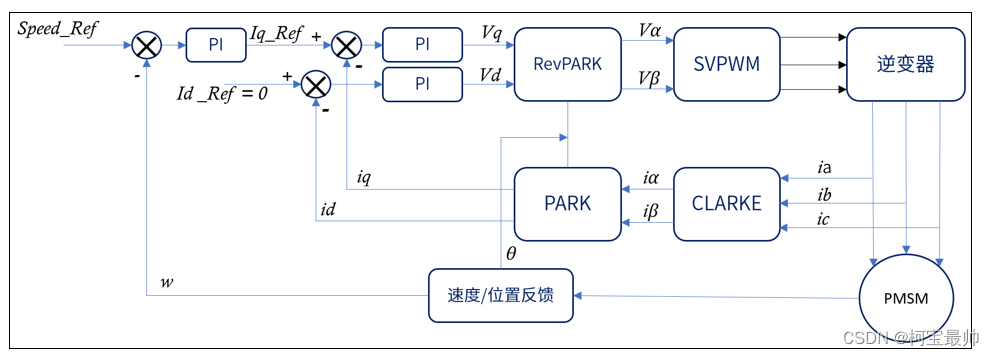
Speed_Ref 是速度设定值,w 是电机转速;将速度环的输出作为电流环的输入,就可以实现速度+电流双闭环控制了。
位置+速度+电流环:

Position_Ref 是位置设定值,Position 是位置反馈。将位置环的输出作为速度环的输入,将速度环的输出作为电流环的输入,就可以实现三闭环控制。
但是位置控制模式的时候,电机的转速会很慢,这时候用平均测速法会存在非常大的误差(转子不动或者动的很慢,编码器就没有输出或者只输出1、2个脉冲)。所以一般使用位置环时,直接使用位置+电流环即可,去掉速度环。
四、SVPWM解析
在介绍SVPWM之前先了解先SPWM!
旋转的PMSM电机波形:
当我们手动将PMSM电机让转子匀速转动时,此时使用示波器观察三相输出电压(反电动势),你会发现有三组正弦波形,且两两之间的相位差为120°

而正弦波正是FOC驱动无刷电机的手段,利用PWM产生的正弦波就是SPWM波。
了解下SPWM:
通过调整占空比使等效电流近似为正弦波,这种PWM也就是SPWM。SPWM不依赖开关顺序,3相独立调制,类似开环控制,是没有反馈的,只管生成正弦波。
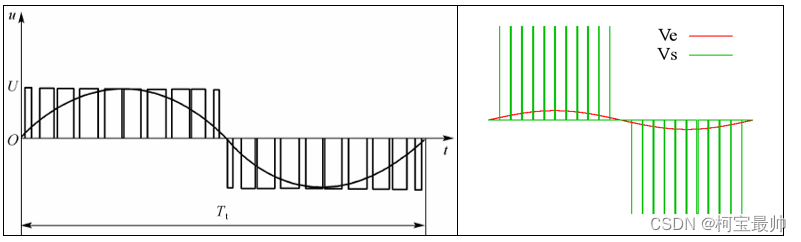
但是SPWM调试方式在FOC实现中并不常用,原因是SPWM要比后面要说的SVPWM的母线电压利用率要低15%。从控制的角度来看,我们根本就不想跟什么三个正弦波打交道,所以就用到了坐标变换。
SVPWM解析
SVPWM (Space Vector Pulse Width Modulation)即:空间电压矢量。由三相逆变器的六个开关元件(MOS管)组成的特定开关模式,使输出电压波形尽可能接近于理想的正弦波形。着眼于如何使电机获得理想圆形磁链轨迹。

SVPWM算法的目的,就是使用逆变电路的6个开关状态把在空间中旋转的矢量表示出来,我们把这个矢量称为空间电压矢量。SVPWM算法实际上计算的是三相逆变器的六个开关何时导通,何时切断(同一列不可同时导通或关闭,即同一半桥不可同时导通,所以有2x2x2=8种情况)

举例分析:

根据三相电阻相等,即Ra=Rb=Rc,再根据串联分压定理:
![]()
则同理可得8种情况的相电压如上右图表格(非零矢量的幅值相同,都是2/3Udc)
坐标系表示空间矢量:
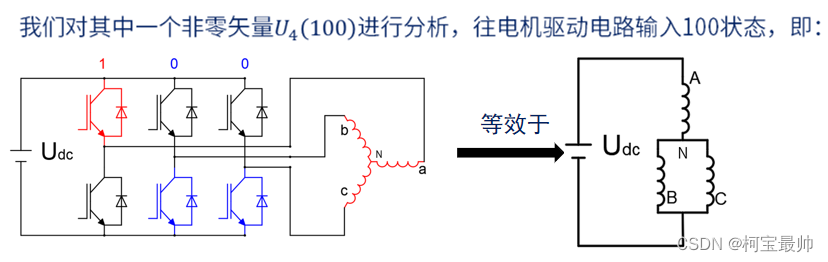
以U4(100)合成的空间电压矢量为例(以指向中心点O的方向为负,反之为正,如A相OA正,AO负),即:
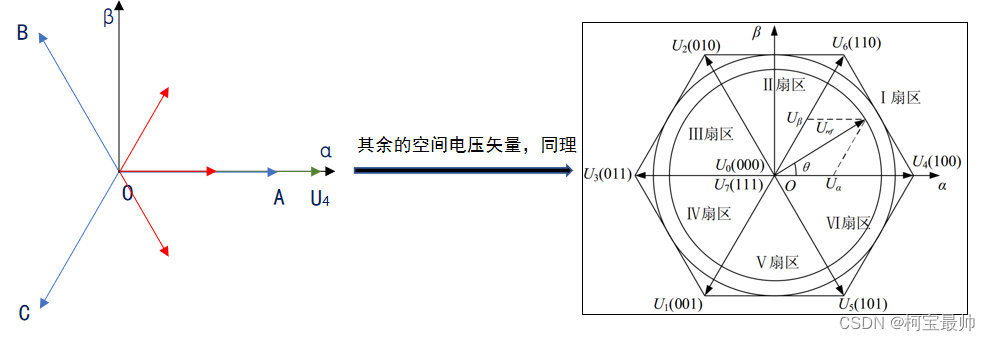
但是这8种开关组合只能合成6个方向的空间电压矢量,如何合成任意位置空间电压矢量?
在一个扇区内,相邻两个电压矢量以及零矢量,按伏秒平衡的原则来合成该扇区内的任意电压矢量 ,即:(本质思路是控制电压时间占比)

只要合理地配置相邻的两个基向量和零矢量在一个周期中的占比,就可以合成出等效的任意空间电压矢量了
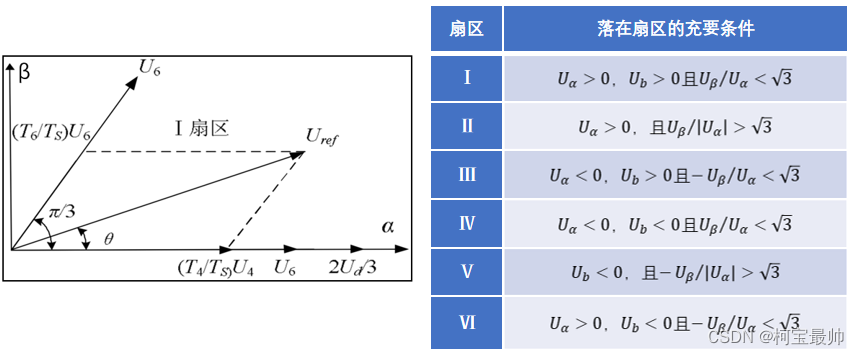
但是还有两个问题,如何计算相邻电压矢量与零矢量在一个周期内的时间占比?期望的电压矢量所属扇区判定?
时间占比计算:
假设在扇区一,那么此时等式为:![]()

结果最后为什么除以2平均分配给零矢量T7和T0呢?(以7段式(7periods)为例)

每个状态切换的时候,都只有一个相发生了转变,从而降低MOS管的开关损耗;合理插入两个零矢量,并且对零矢量在时间上进行了平均分配,以使产生的PWM对称,从而有效地降低了PWM的谐波分量。
扇区判定:

总结
遇到挫折,要有勇往直前的信念,马上行动,坚持到底,决不放弃,成功者决不放弃,放弃者绝不会成功。成功的道路上,肯定会有失败;对于失败,我们要正确地看待和对待,不怕失败者,则必成功;怕失败者,则一无是处,会更失败。
今天的学习分享到此就结束了,我们下次再见!!
往期精彩:
控制理论 PID算法
STM32定时器输入捕获(IC)
STM32定时器输出比较(PWM波)
STM32定时中断
STM32外部中断
STM32GPIO精讲
…