Baumer工业相机堡盟工业相机如何使用BGAPI SDK进行两个万兆网相机的同步采集
- Baumer工业相机
- Baumer工业相机图像数据转为Bitmap的技术背景
- Baumer同步异常 :客户使用两个Baumer万兆网相机进行同步采集发现FrameID相同,但是图像不同步
- 细节
- 原因
- 解决办法
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer工业相机由于其性能和质量的优越和稳定,常用于高速同步采集领域,通常使用各种图像算法来提高其捕获的图像的质量。
Baumer工业相机图像数据转为Bitmap的技术背景
将工业相机图像数据转换为位图格式通常包括几个步骤:
- 从工业相机中获取图像数据,这可能需要使用专门的图像采集设备。
- 将图像数据从相机采集的原始格式转换为可由软件处理的标准化格式。
- 对图像数据进行预处理,以纠正原始图像中可能存在的失真或其他问题。
- 将预处理后的图像数据转换为位图格式,这是一种常用的文件格式,用于在计算机系统上存储图像。
这些步骤的具体技术细节会因所使用的具体相机和软件的不同而不同,但这个过程中使用的一些常用工具和技术可能包括:
- SDK(软件开发工具包),提供访问相机硬件和处理原始图像数据的库和API
- 图像处理软件,如MATLAB或OpenCV,可用于纠正图像失真并对图像数据应用过滤器或其他调整。
- 图像转换库,如ImageMagick或GDAL,可用于将预处理的图像数据转换为位图格式。
Baumer同步异常 :客户使用两个Baumer万兆网相机进行同步采集发现FrameID相同,但是图像不同步
细节
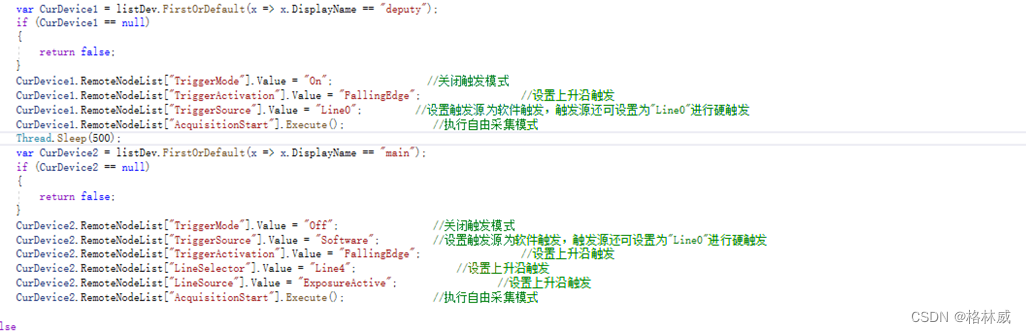
使用两个Baumer VLXT-17M.I相机,主相机设置固定帧率500帧,从相机设置固定帧率500帧,主相机执行全帧率自由采集,通过输出ExposureActive IO信号去触发从相机,进行同步采图测试时发现,从相机的图像和主相机的图像不同步,图像慢于主相机图像 。具体表现形式是,前面部分图像同步,后面的图像开始出现微小的滞后,最后同步性越来越差。相机初始化信息如下所示,main为主相机,deputy为从相机:
原因
通过确认发现,两个Baumer万兆网相机在自由采集模式相同曝光增益下,全帧率不相同:主相机660fps,从相机550fps,两个相机在同一张网卡下,由于某些设置不同,导致两相机当前最大帧率显示不同,数据量不一致,帧率不一致,同步性到后面也会越来越不一样。
解决办法
解决办法:设置两个相机所有的参数相同,增益曝光和像素格式全部相同,并在设置完成后对两个相机进行断电重启,最终两个相机最大帧率稳定在650fps左右,如下图所示。
最后在进行同步性测试,可以实现两个相机的图像同步性一致。
或者,将两个相机分布在两张网卡上,并设置相同的参数,以保证两相机在相同的参数下实现相同的帧率