二叉搜索树
- 二叉搜索树的概念
- 二差搜索树结构设计
- 二叉搜索树的操作以及实现
- 遍历
- 判空
- 插入
- 查找
- 删除(☆☆☆)
- 二叉搜索树的其他方法
- 二叉搜索树的应用
- 二叉搜索树的性能分析
- 二叉树习题练习
- AVL树
- AVL树的概念
- AVL树的结构设计
- AVL树的插入(非常重要)
- AVL树的旋转(☆☆☆☆☆)
- AVL树的插入操作的代码
- 代码中的细节
- AVL树的性能
二叉搜索树的概念
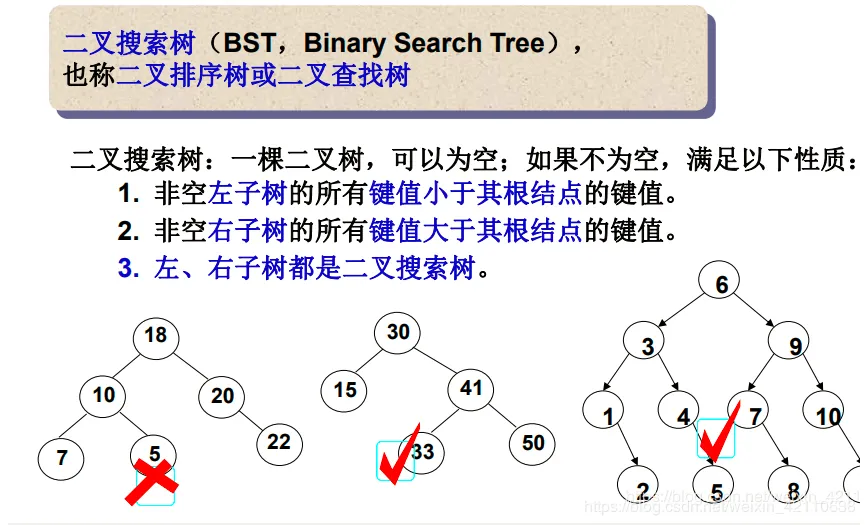
二叉搜索树又称二叉排序树,它或者是一棵空树,或者是具有以下性质的二叉树:
- 若它的左子树不为空,则左子树上所有节点的值都小于根节点的值
- 若它的右子树不为空,则右子树上所有节点的值都大于根节点的值
- 它的左右子树也分别为二叉搜索树
二差搜索树结构设计
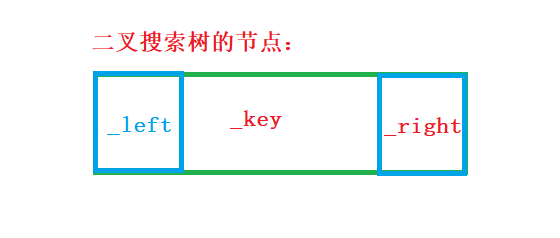
首先我们肯定需要一个节点:
其中_key的数据类型可以是任意数据类型,因此,我们可以将二叉搜索树的节点设置成一个模板类:
template<class K>
class BSNode
{
public:
BSNode(const K& key = K())
:_key(key),_left(nullptr),_right(nullptr)
{}
~BSNode()
{}
public:
K _key;
BSNode<K>* _left;
BSNode<K>* _right;
};
同理二叉搜索树,我们也要设计成模板类:
template<class K>
class BinarySearchTree
{
public:
typedef BSNode<K> Node;
BinarySearchTree(Node* root = nullptr) :
_root(root) {}
//function code……
private:
Node* _root;
};
二叉搜索树的操作以及实现
遍历
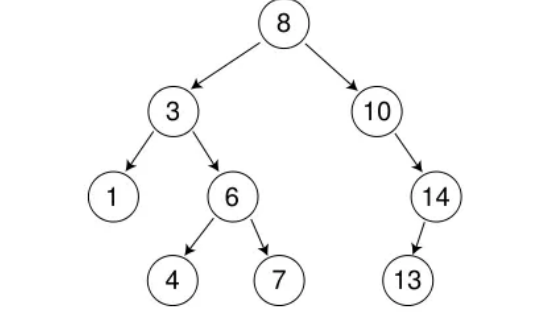
二叉搜索树的遍历,我们一般使用的是中序遍历,因为这种方式遍历出来的结果,一定是有序的:
对于中序遍历,我们不在过多赘述,直接上代码:
public:
void InOrder()//将这个接口暴露给用户,然后隐藏真正的_inOrder接口
{
//为什么要封装这一层呢?
//主要是因为,我们像实现:对象.Inorder()的方式来直接调用,不想在传入参数,况且
//_root是私有变量,在类外我们也不好获取,就算获取到了,也会感觉写法不够优雅;
//_root设置为私有的话,又会破坏其封装性
_InOrder(_root);
cout << endl;
}
private:
void _InOrder(Node* root)
{
if (root == nullptr)
return;
_InOrder(root->_left);
cout << root->_key << " ";
_InOrder(root->_right);
}
上面是递归写法,简直小意思啦,我们玩一个稍微难一点的,我们可以用非递归的方式来实现二叉树的中序遍历:
//中序遍历非递归写法
void InOrderNR()const
{
Node* cur = _root;
std::stack<Node*> st;
while (cur!=nullptr||st.empty()==false)
{
while (cur)
{
st.push(cur);
//先访问左子树
cur = cur->_left;
}
//访问根
std::cout << st.top()->_key << " ";
//访问右子树
cur = st.top()->_right;
st.pop();
}
std::cout << std::endl;
}
思路:
1、将cur这课树的左路节点全部入栈;
2、访问栈顶元素;
3、开始访问栈顶元素的右子树(cur=st.top()->_right),并弹栈;
既然都到这了,我们随便也把前序遍历、后序遍历的非递归版本也写一下
//前序遍历非递归
void PreOrderNR()const
{
Node* cur = _root;
std::stack<Node*> st;
while (cur != nullptr || st.empty() == false)
{
while (cur)
{
st.push(cur);
//先访问根
std::cout << cur->_key << " ";
//再访问左子树
cur = cur->_left;
}
//开始访问右子树
cur = st.top()->_right;
st.pop();
}
std::cout << std::endl;
}
思路:
1、将cur这课树的左路节点全部入栈,在入栈的同时访问cur节点;
2、访问栈顶元素的右子树(cur=st.top()->_right),弹栈;
//后序遍历非递归
void PostOrderNR()const
{
Node* cur = _root;
Node* prev = nullptr;//记录上一次访问的节点
std::stack<Node*> st;
while (cur != nullptr || st.empty() == false)
{
while (cur)
{
st.push(cur);
//访问左子树
cur = cur->_left;
}
//开始访问栈顶元素的右子树
//1、如果右子树为空,或者被访问过了,那就直接访问根
if (st.top()->_right == nullptr || prev == st.top()->_right)
{
prev = st.top();
std::cout << st.top()->_key << " ";
st.pop();
}
else
{
//2、如果右子树不为空,也没有被访问过,那么就开始访问右子树
cur = st.top()->_right;
}
}
std::cout << std::endl;
}
思路:
1、将cur这课树的左路节点全部入栈;
2、访问栈顶元素的右子树,在访问之前,我们可以先比较一下:
①如果栈顶元素的右子树为空树(st.top()->_right ==nullptr) 或者 说栈顶元素的右子树我们已经访问过了(prev ==st.top()->_right),那么说明栈顶元素的右子树,已经不值得我们再去访问了,我们直接访问栈顶元素就好了,然后弹栈;
②如果前面的两个条件都不满足,那么说明栈顶元素的右子树还没有被访问过,我们就需要先去访问栈顶元素的右子树(cur=st.top()->_right);
判空
bool empty()const
{
return _root == nullptr;
}
插入
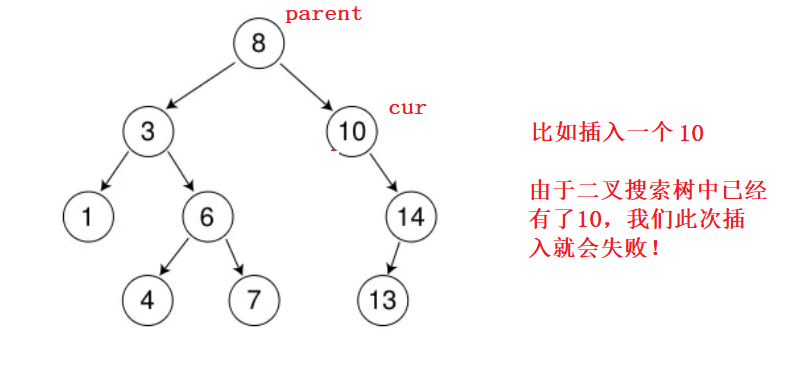
根据二叉搜索树的性质,我们可以很轻松的写出插入的操作:
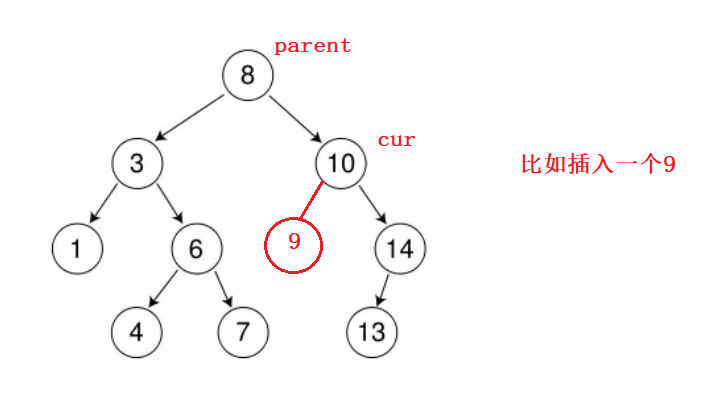
搜索二叉树,不允许插入重复的元素,如果重复元素插入,那么表面此次插入失败;
bool insert(const K& key)
{
//如果是首次插入,那么直接更新_root
if (_root == nullptr)
{
_root= new Node(key);
return true;
}
Node* cur = _root;
Node* parent = nullptr;//记录一下cur的父亲,方便以后链接
while (cur)
{
parent = cur;//在cur往后走之前先记录一下cur
if (cur->_key > key)//要插入的节点,比cur->_key小,所以我们应该插在cur的左子树
{
cur = cur->_left;
}
else if (cur->_key < key)//要插入的节点,比cur->_key大,所以我们应该插在cur的右子树
{
cur = cur->_right;
}
else//二叉搜索树不允许插入重复元素,插入失败
{
return false;
}
}
//找到了插入位置
Node* NewNode = new Node(key);
//判断一下该插入parent的左孩子,还是右孩子
if (key < parent->_key)
{
//插入parent的左子树
parent->_left = NewNode;
}
else
{
//插入parent的右子树
parent->_right = NewNode;
}
return true;
}
递归版本的插入:
bool insertR(const K& key)
{
return _insertR(_root, key);
}
//这里注意root的类型,是指针的引用,这里很巧妙,避免了设计多个参数的困扰,
//这里的root有两层含义:
//1、在空间上,root引用的是上一个节点的_left域或者_right域;
//2、在存储内容上,是本层节点的地址;
bool _insertR(Node*& root, const K& key)
{
//找到了要插入的位置
if (root == nullptr)
{
Node* newNode = new Node(key);
root = newNode;
return true;
}
//插入失败
if (root->_key == key)
return false;
//插在cur的左子树
if (root->_key > key)
return _insertR(root->_left, key);
else//插在cur的右子树
return _insertR(root->_right, key);
}
查找
查找的思想与插入一样,就不在过多赘述:
Node* find(const K& key)
{
Node* cur = _root;
while (cur)
{
Node* parent = cur;//记录一下key的父亲
if (cur->_key > key)//cur往左走
cur = cur->_left;
else if (cur->_key < key)
cur = cur->_right;
else//找到这个节点了
return cur;
}
return nullptr;//没找到
}
递归版本:
Node* findR(const K&key)//递归版本的查找
{
return _findR(_root,key);
}
Node* _findR(Node* root, const K& key)
{
if (root == nullptr)
return nullptr;
if (root->_key == key)
return root;
if (root->_key > key)
return _findR(root->_left, key);
else
return _findR(root->_right, key);
}
删除(☆☆☆)
二叉搜索树的删除,是比较复杂的,因为根据被删除的节点的类型不同,我们有着不同的删除方法;
为此我们可以对这些情况进行分类:
1、假设被删除的节点是个叶子节点;
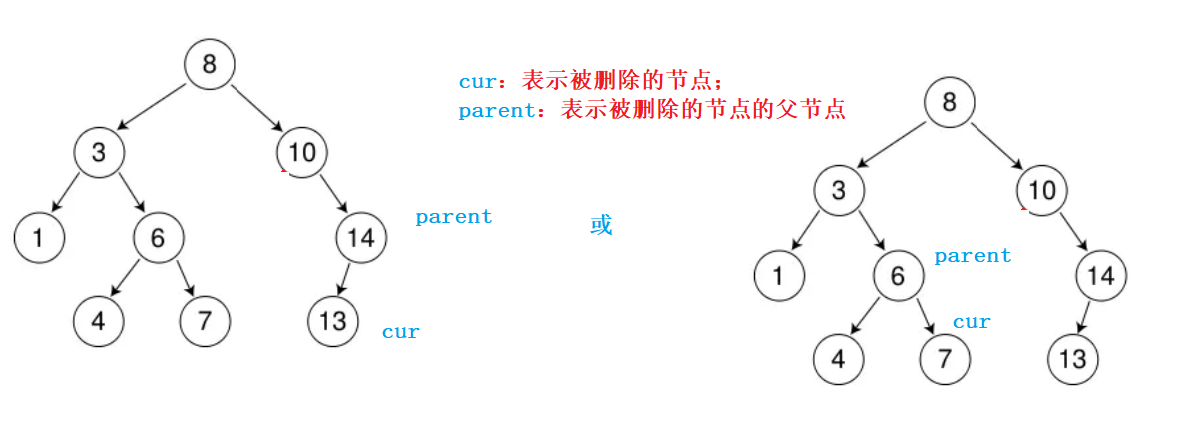
解决办法:
- 先判断cur是parent的左孩子还是右孩子节点,然后将对应的parent节点的_left域或_right域置空;
- 最后释放cur节点;
2、 假设被删除的节点是度为1的节点
其中度为1的节点,还可以细分为:左孩子为空&&右孩子不为空、右孩子为空&&左孩子不为空,这两种情况;我们来具体讨论一下:
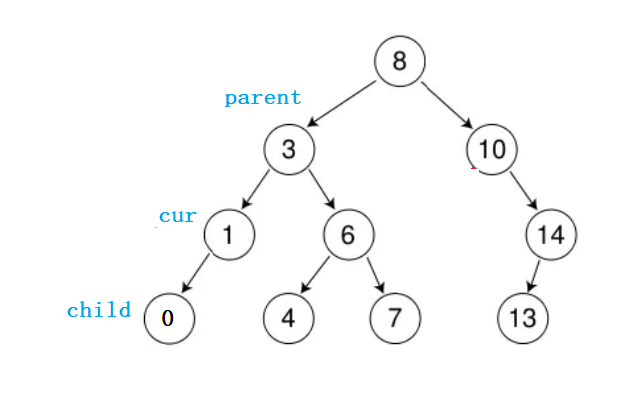
①左孩子为空&&右孩子不为空
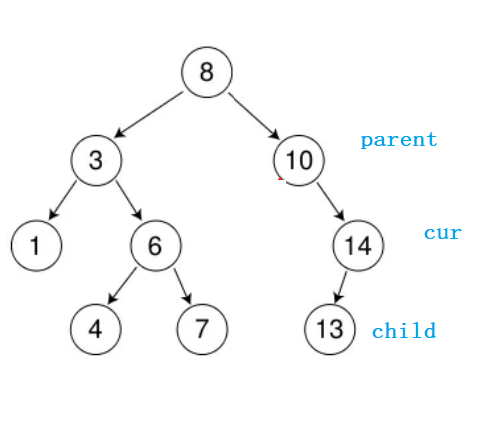
如此看来,cur节点既然度为1,那么必然存在后代对吧,而且这个后代我们可以很轻松的找到对吧!
我们就用child来表示cur节点的后代吧;
由于现在我们讨论的cur是左孩子为空&&右孩子不为空,那么cur节点的右孩子一定存在对吧,那么child=cur->_right;这一定是成立的吧!
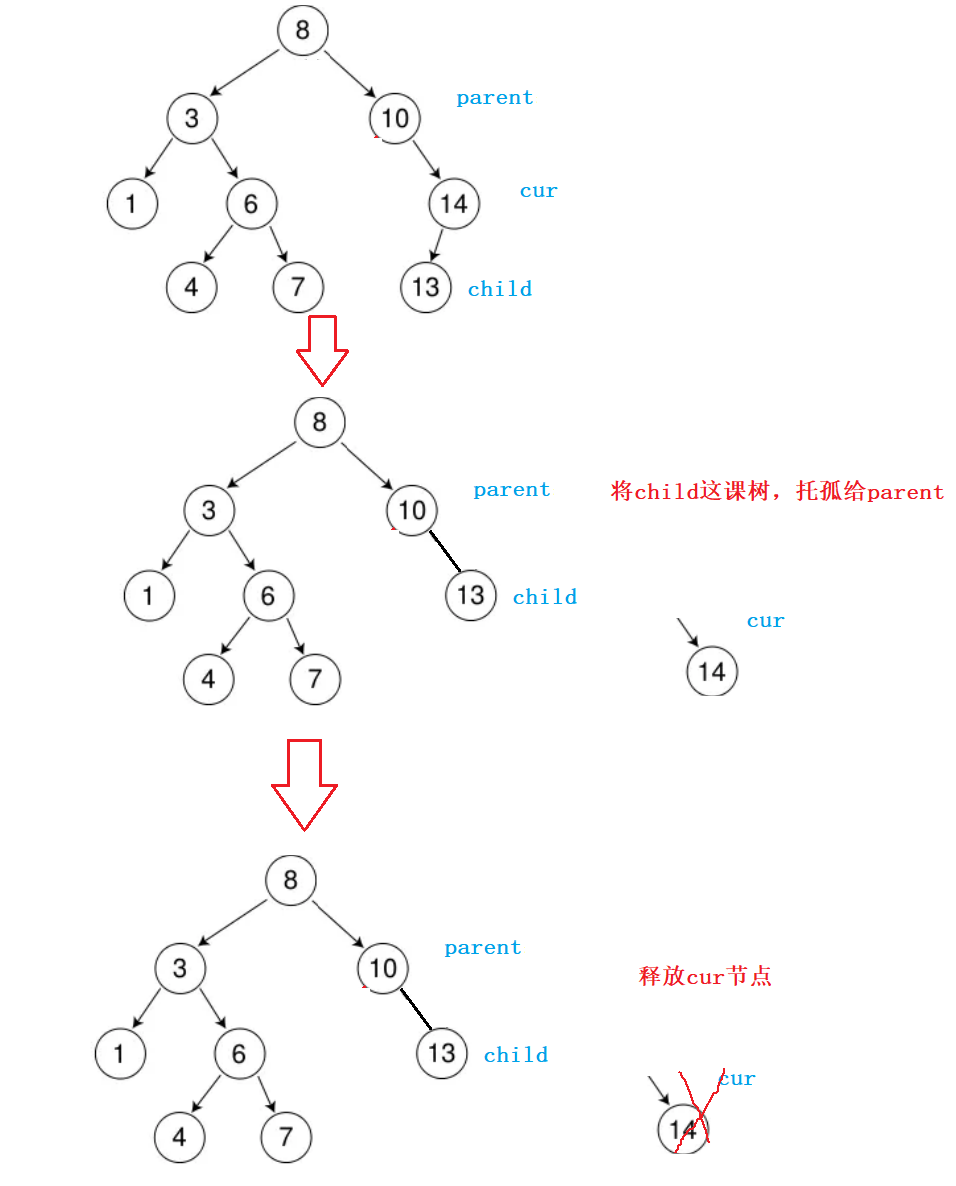
因此我们现在我们要做的就是“托孤”,cur不是马上要被删除了,在cur节点被删除之前,我们先把cur的孩子托付给parent,可是到底是托付给parent的右边还是左边呢?
这是我们需要判断的:
如果cur->_key< parent->_key,说明cur是parent的左孩子,作为cur的孩子,child自然应该链接在parent的左边;
如果cur->_key > parent->_key,说明cur是parent的右孩子,作为cur的孩子,child自然应该链接在parent的右边;
随后完成“托孤”这一壮举过后,我们便可以让cur顺利的“驾崩”了;
②右孩子为空&&左孩子不为空
在这种情况下,cur节点的左孩子一定存在,我们需要先保存一下cur节点的左孩子,就用child来表示;
接着,我们再将cur的孩子“托孤”给parent节点,具体是托孤给parent的右边还是左边:我们需要进行判断:
如果cur->_key < parent-> _key,说明cur是parent的左孩子,作为cur的孩子,child自然应该链接在parent的左边;
如果cur->_key > parent->_key,说明cur是parent的右孩子,作为cur的孩子,child自然应该链接在parent的右边;
紧接着,我们在释放cur节点,就顺利的完成了本次节点的删除!
综上所述:
我们可以发现:左孩子为空&&右孩子不为空、右孩子为空&&左孩子不为空,这两种情况的处理方式非常相同!
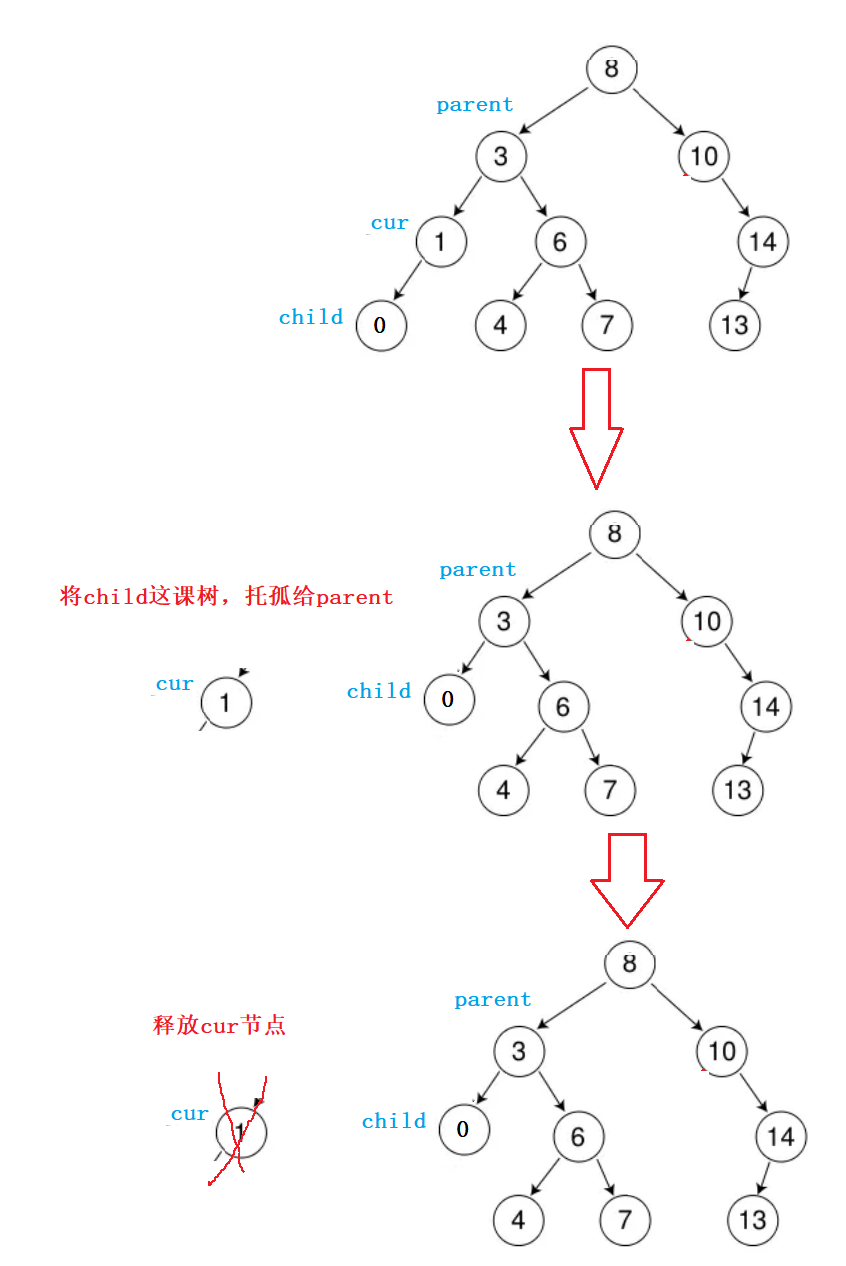
解决办法:
- 找到cur的后代(child);
- 根据cur在parent的左边还是右边,将child正确的“托孤”给parent;
- 释放cur节点;
3、假设被删除的节点是度为2的节点
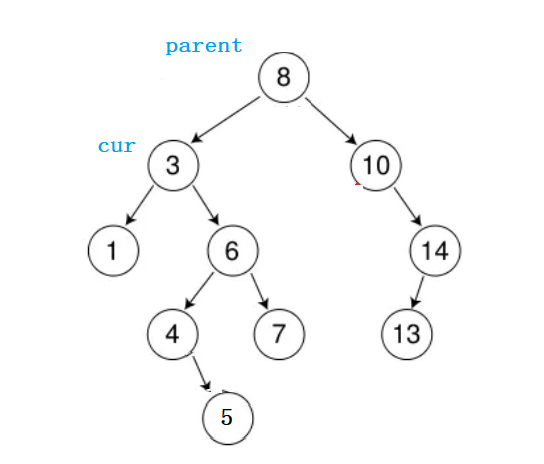
对于这种节点的删除,我们所采取的办法是:“狸猫换太子”+“托孤” 这两者相结合;
如何个“狸猫换太子”?切听我慢慢道来:
cur不是一个度为2的节点嘛,那么他的右孩子一定存在对吧!
我们就暂且将,cur的右孩子用CurRight来表示吧:
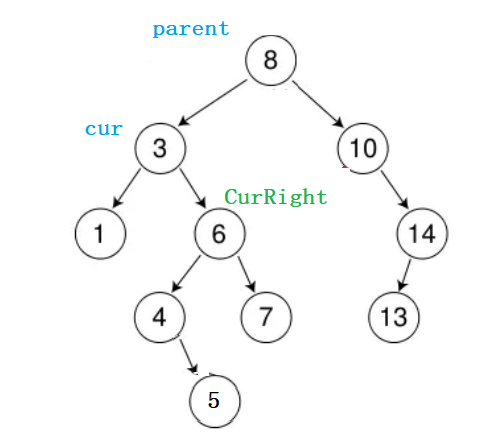
现在,我们将CurRight这课子树与原树剥离开来(逻辑层面上的剥离),那么CurRight是不是就是一颗独立的子树了,好,我们在去CurRight这课树中寻找最小值寻找,我们暂且用RightMin来记录吧,同时使用PRightMin来记录RightMin节点的父节点,
最开始的时候:RightMin=CurRight,PRightMin=nullptr;
在一颗二叉搜索树中寻找这课树的最小值,那么这个最小值一定在这课树的最左边不是!所以我们只要一直往左边走就能找到CurRight这课树的最小值了:
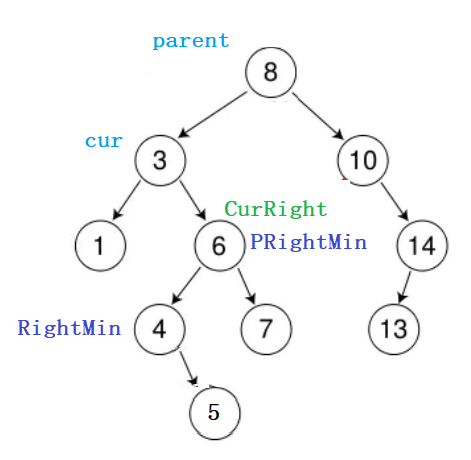
走到这里过后,我们在保存一下,RightMin节点的后代,RightMin节点一定是这课树的最小节点,同时也是这课树的最左节点,那么RightMin节点一定是一个度为0或者度为1的节点,我们不管他到底是那种情况,我们先保存就对了,我们用RightMin_child来记录RightMin节点的孩子:
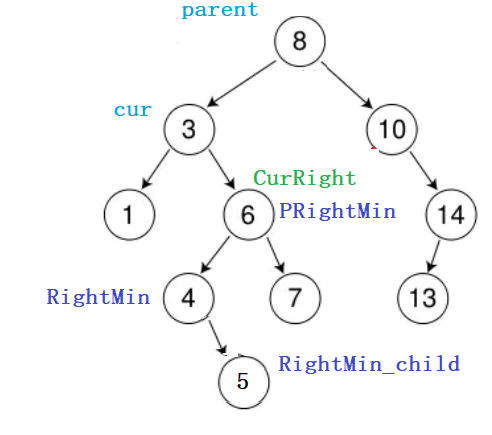
做完这一切准备,我们的好戏就要开场了:
我们交换cur节点与RightMin节点的 _key值,然后利用“托孤”的办法,删除RightMin节点,你看看,我们是不是就顺利的完成了本次删除:
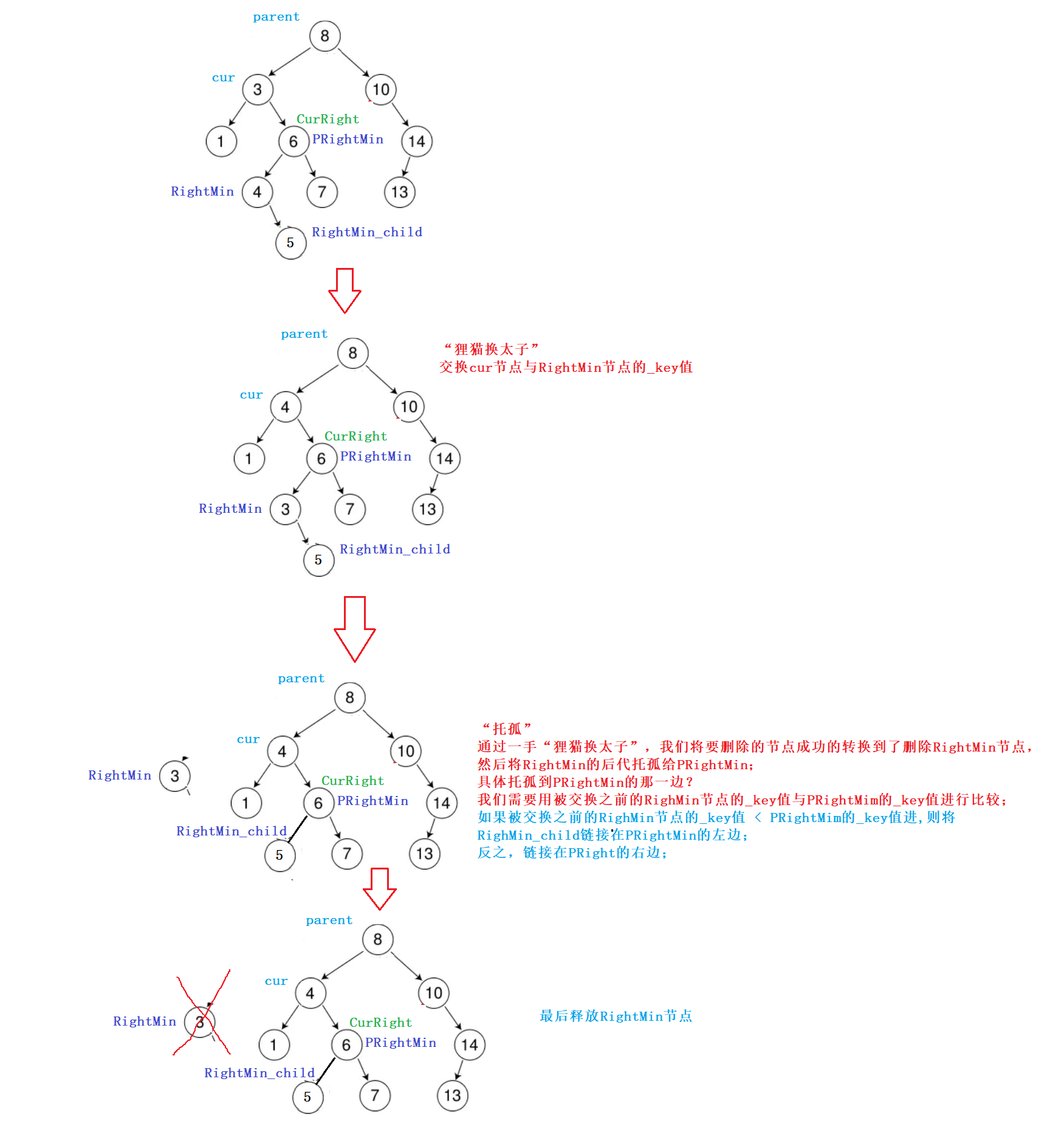
解决办法:
- 先找到cur这个节点的右子树,记作CurRight
- 在CurRight这课树中,找到这课树中的最小节点及其父亲节点,分别记作:RightMIn、>PRightMin,然后在保存一下RightMin这个节点的右子树,暂且记作RightMin_child;
- 交换cur节点与RightMin_child节点的_key值;
- 将RightMin_child这课树托孤给PRightMin这课树;
- 释放RightMin这个节点;
好了,我们讨论完了,所有被删除的节点的情况,因此,根据这几种情况,我们就用代码来实现一下把,当然,上面的只是大体思路,还有一些细节,我们需要在代码中具体处理一下:
bool erase(const K& key)
{
Node* parent = nullptr;
Node* cur = _root;
while (cur)
{
if (cur->_key < key)
{
parent = cur;
cur = cur->_right;
}
else if (cur->_key > key)
{
parent = cur;
cur = cur->_left;
}
else//被删除的节点,找到了
{
//细节1:实际上,我们按照我们刚才的理论总共有3中情况,但是实际上第一种情况与第二种
//情况实际上是可以合并在一起的,我们可以假设叶子节点的孩子为空树嘛,空树也是树!
//因此,实际的删除情况只有2种!
if (cur->_left == nullptr || cur->_right == nullptr)
{
Node* child = nullptr;
//提前记录一下被删除的节点的孩子
if (cur->_right == nullptr)//右孩子为空&&左孩子不为空
child = cur->_left;
else//左孩子为空&&右孩子不为空
child = cur->_right;
//细节2:我们之前讨论的删除节点cur都是建立在cur的parent节点存在的情况之上
//要是万一,cur没有父亲节点呢?(parent=nullptr)
//谁没有父亲?根节点!因此,我们的child没有parent可以托付
//我们的child就只能,立马继位了,成为新一代的“王”
if (cur == _root)//被删除节点是根节点
_root = child;
else//被删除节点不是根节点,直接托孤
//child托给parent的右边
if (cur->_key > parent->_key)
parent->_right = child;
else//child托给parent的左边
parent->_left = child;
delete cur;//释放cur节点
}
else
{
//cur是度为2的节点
Node* RightMin = cur->_right;//用于记录cur的右子树中的最小节点
Node* PRightMin = cur;//用于记录cur的右子树中的最小节点 的父亲节点
while (RightMin->_left)
{
PRightMin = RightMin;
RightMin = RightMin->_left;
}
//找到了右子树最小的节点
//1、交换cur节点和RightMin的节点的值(狸猫换太子)
std::swap(cur->_key,RightMin->_key);
//2、记录RightMin的右孩子
Node* RightMin_child = RightMin->_right;//记录RightMin的孩子
//3、将右子树最小节点的右孩子托孤给父亲
//这里我们把右子树“剥离”整颗树来看,RightMin节点有无父节点
if (PRightMin == cur)//说明在cur->_right整颗右子树中没有RightMin节点的父节点,我们需要将RIghtMin的孩子托付给cur的右边
PRightMin->_right = RightMin_child;
//RIghtMIn在cur->right这课树中有父节点
//直接将孩子节点托给PRightMin节点的左边
else
PRightMin->_left = RightMin_child;
delete RightMin;//释放RightMin节点
}
return true;
}
}
//没找到要删除的节点,直接删除失败
return false;
}
上面是,非递归版本,我们再来搞一搞递归版本:
bool eraseR(const K&key)
{
return _eraseR(_root,key);
}
//注意这里,采用的root的引用,非常的巧妙!
bool _eraseR(Node*& root, const K&key)
{
if (root == nullptr)
return false;
if (root->_key == key)
{
//a.被删除的节点度为0或度为1
if (root->_left == nullptr || root->_right == nullptr)
{
Node* del = root;
Node* child = nullptr;
if (root->_left == nullptr)
child = root->_right;
else
child = root->_left;
root = child;
delete del;
}
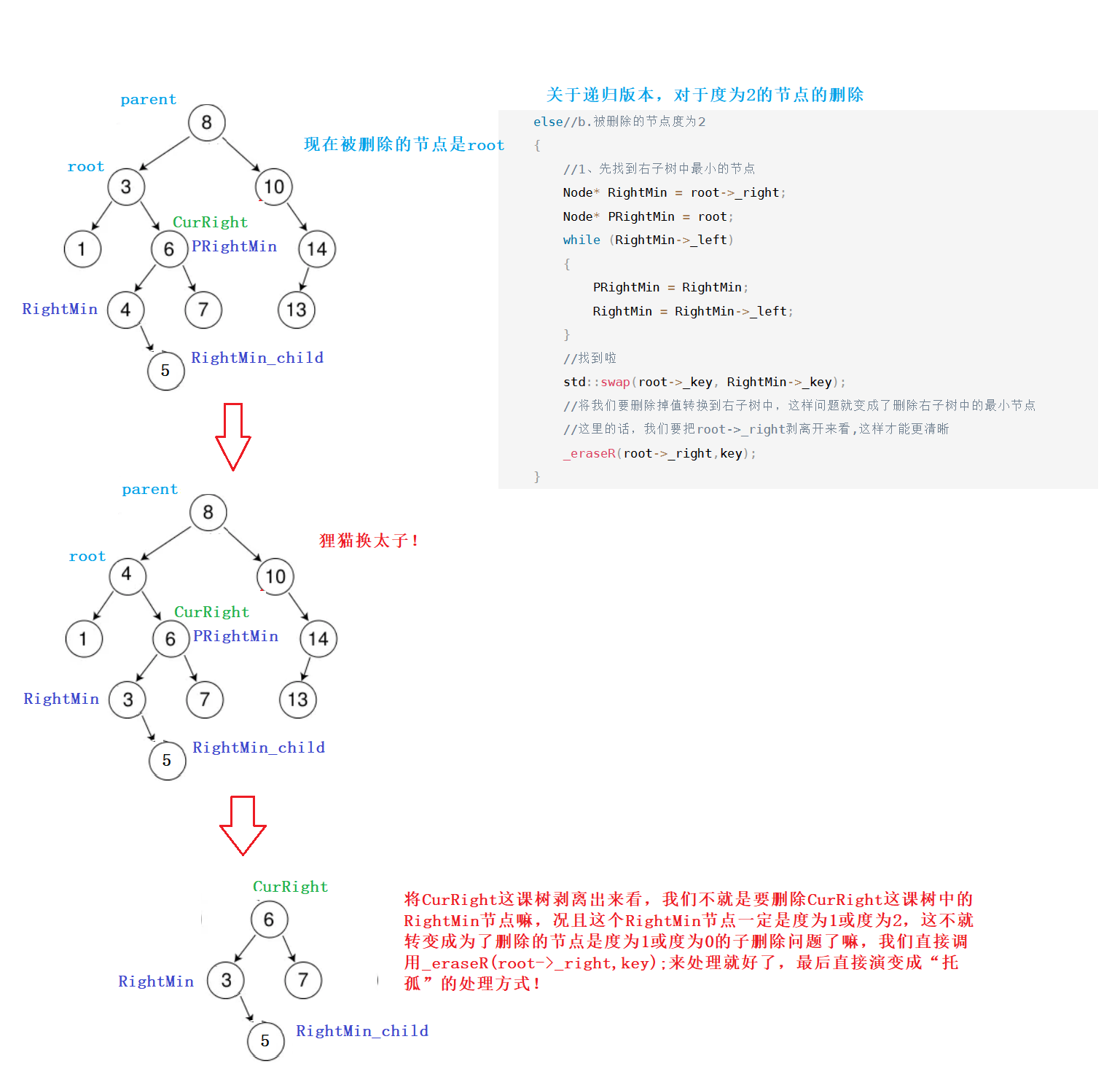
else//b.被删除的节点度为2
{
//1、先找到右子树中最小的节点
Node* RightMin = root->_right;
Node* PRightMin = root;
while (RightMin->_left)
{
PRightMin = RightMin;
RightMin = RightMin->_left;
}
//找到啦
std::swap(root->_key, RightMin->_key);
//将我们要删除掉值转换到右子树中,这样问题就变成了删除右子树中的最小节点
//这里的话,我们要把root->_right剥离开来看,这样才能更清晰
_eraseR(root->_right,key);
}
return true;
}
if (root->_key > key)
return _eraseR(root->_left, key);
else
return _eraseR(root->_right,key);
}
二叉搜索树的删除测试
如果,你看明白了,那我觉得这件事:
二叉搜索树的其他方法
二叉搜索树,坑定是要进行深拷贝的,因此,我们需要重载一下operator=和重写拷贝构造函数:
//拷贝构造实现
BinarySearchTree(const BinarySearchTree<K>& bst)
{
_root=copy(bst._root);
}
Node* copy(Node* root)
{
if (root == nullptr)
return nullptr;
Node* head = new Node(root->_key );
head->_left = copy(root->_left);
head->_right = copy(root->_right);
return head;
}
//赋值元素符
BinarySearchTree<K>&operator=(BinarySearchTree<K> bst)
{
std::swap(_root, bst._root);
return*this;
}
当然,析构也是少不了的:
//利用层序遍历来进行析构
~BinarySearchTree()
{
std::queue <Node*> q;
if (_root)
{
q.push(_root);
while (q.empty()==false)
{
Node* root = q.front();
q.pop();
if (root->_left)
q.push(root->_left);
if (root->_right)
q. push(root->_right);
delete root;
}
}
}
二叉搜索树的应用
- K模型:K模型即只有key作为关键码,结构中只需要存储Key即可,关键码即为需要搜索到
的值。
比如:给一个单词word,判断该单词是否拼写正确,具体方式如下:
以词库中所有单词集合中的每个单词作为key,构建一棵二叉搜索树
在二叉搜索树中检索该单词是否存在,存在则拼写正确,不存在则拼写错误- KV模型:每一个关键码key,都有与之对应的值Value,即<Key, Value>的键值对。该种方
式在现实生活中非常常见:
比如英汉词典就是英文与中文的对应关系,通过英文可以快速找到与其对应的中文,英
文单词与其对应的中文<word, chinese>就构成一种键值对;
再比如统计单词次数,统计成功后,给定单词就可快速找到其出现的次数,单词与其出
现次数就是<word, count>就构成一种键值对。
二叉搜索树的性能分析
插入和删除操作都必须先查找,查找效率代表了二叉搜索树中各个操作的性能;
理想情况下,搜索二叉树接近完全二叉树查找的效率是高度次,也就是O(
l
o
g
2
N
log_2 N
log2N );
最差情况下,搜索二叉树退化为单支树,其查找效率为O(N);
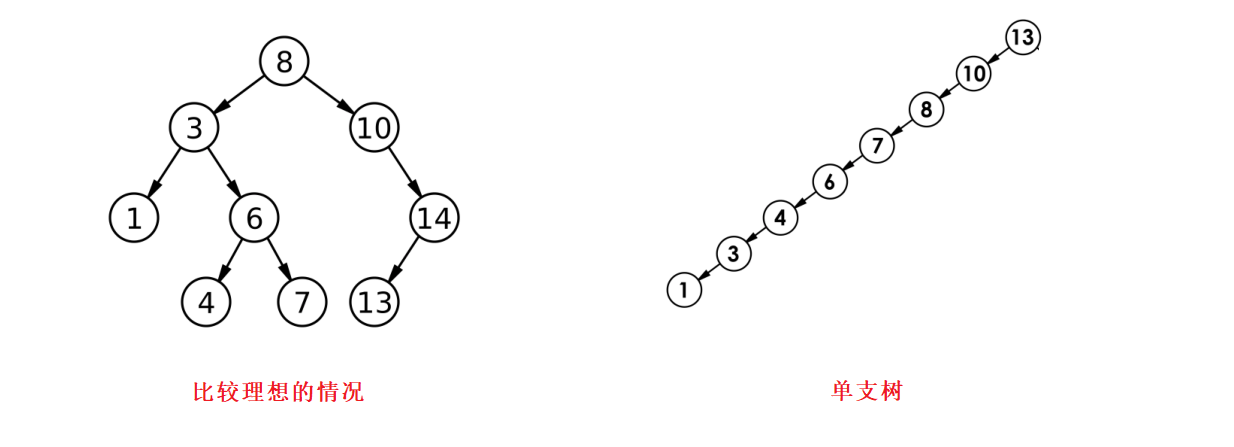
为此,有没有什么办法来解决单支树的查找问题呢?
答案是有的,AVL树就是专门用来解决这种单支树所带来的效率问题的;
二叉树习题练习
- 二叉树创建字符串。OJ链接
- 二叉树的分层遍历1。OJ链接
- 二叉树的分层遍历2。OJ链接
- 给定一个二叉树, 找到该树中两个指定节点的最近公共祖先 。OJ链接
- 二叉树搜索树转换成排序双向链表。OJ链接
- 根据一棵树的前序遍历与中序遍历构造二叉树。 OJ链接
- 根据一棵树的中序遍历与后序遍历构造二叉树。OJ链接
- 二叉树的前序遍历,非递归迭代实现 。OJ链接
- 二叉树中序遍历 ,非递归迭代实现。OJ链接
- 二叉树的后序遍历 ,非递归迭代实现。OJ链接
AVL树
AVL树的概念
二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查
找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii
和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
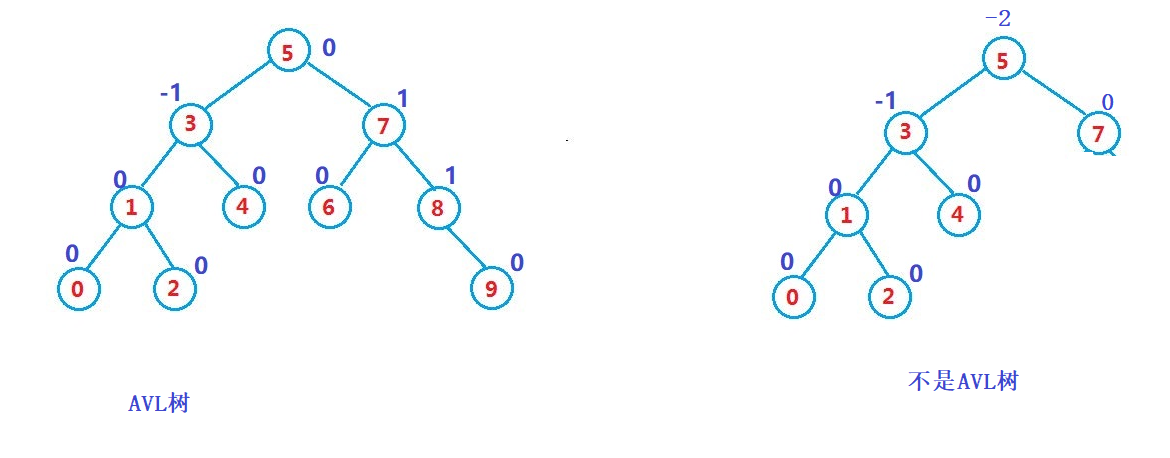
AVL树的定义:
- 首先是一颗二叉搜索树;
- 其次是一颗平衡二叉树;或者任一一个节点的左右子树高度差的绝对值都不超过1;
其中,我们把左右子树的高度差叫做平衡因子;
在这里我们规定,平衡因子=右子树的高度-左子树的高度
AVL树的结构设计
//AVL树的节点
template<class K, class V>//直接设置成KV模型,不搞K模型了
class AVLTreeNode
{
public:
AVLTreeNode(const std::pair<K, V>& p) :
_data(p),
_left(nullptr),
_right(nullptr),
_parent(nullptr),
_bf(0)
{}
std::pair<K, V> _data;//K、V关系封装在一起
int _bf;//平衡因子
AVLTreeNode<K, V> *_left;//
AVLTreeNode<K, V> *_parent;//用于记录当前节点的父节点
AVLTreeNode<K, V> *_right;
};
//二叉搜索树
template<class K, class V=bool>
class AVLTree
{
typedef AVLTreeNode<K, V> Node;//节点
public:
AVLTree() :_root(nullptr)
{}
private:
Node* _root;
};
AVL树的插入(非常重要)
AVL树就是在二叉搜索树的基础上引入了平衡因子,因此AVL树也可以看成是二叉搜索树。那么AVL树的插入过程可以分为两步:
1、按照二叉搜索树的方式插入新节点;
2、调整平衡因子的节点;
对于一颗合法的AVL树来说,在AVL树中的每一个节点的平衡因子只有三种情况:-1、0、1;
如果,平衡因子是其它的值,那么说明这并不是一颗合法的AVL树;
当然,上面的一切都是建立在这课树已经是一个二叉搜索树的前提下,才有的;
因此,现在我们向一颗AVL树中插入节点,那么势必会导致AVL树中的某些节点的平衡因子发生改变,为了保证插入节点过后,这课树依旧是一颗AVL树,我们需要对相关节点的平衡因子,进行调整;
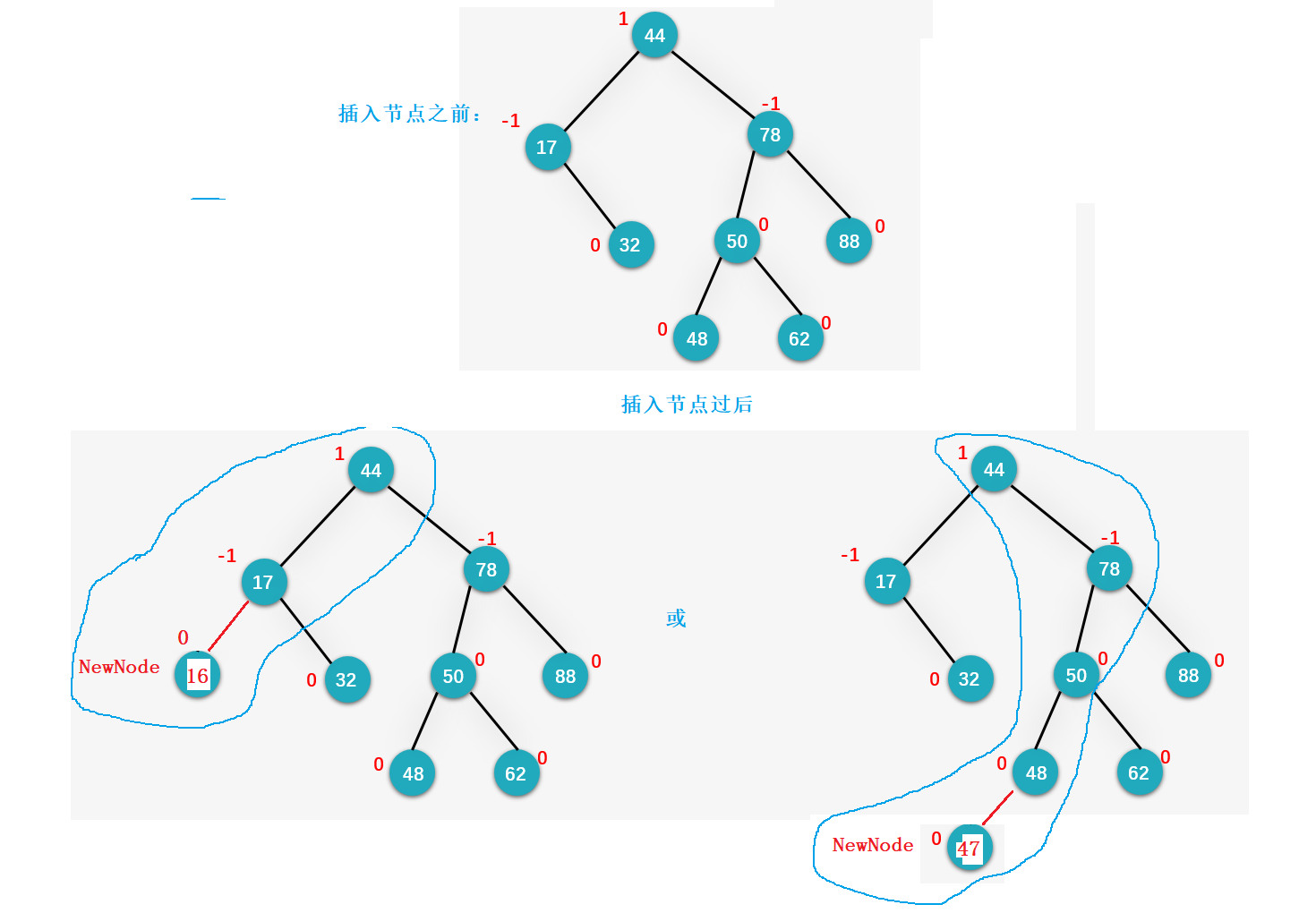
我们可以发现,当我们插入一个新节点过后,我们必须调整这些节点的平衡因子,哪些节点?
新插入节点的祖先节点的平衡因子!,对于其他节点的平衡因子,我们不必调节,为什么?
根据平衡因子的定义:平衡因子=右子树高度-左子树高度,对于这些除了NewNode节点及其祖先节点之外的节点来说,插入节点前后,这些节点的左子树、右子树的高度根本没有发生变化,平衡因子自然也就不会发生变化,那么我们自然也就不用去关心这些节点的平衡因子;
我们只管调整新插入的节点的祖先节点的平衡因子,由于我们在插入之前这课树就已经是一颗AVL树,因此每一个节点的平衡因子范围是[-1,1],那么在插入节点过后,我们的祖先节点的平衡因子可能的范围就变成了:[-2,2];
因此,我们假设NewNode节点的父节点为parent:
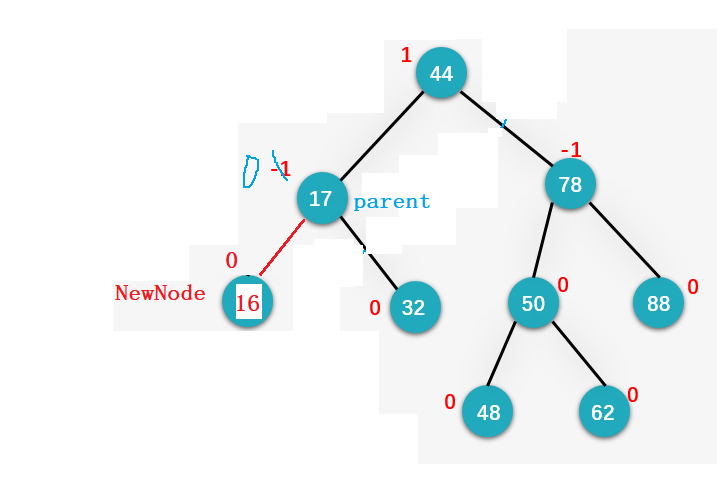
如果,我们插入的节点,在parent这课树的左边的话,那么parent的左子树的高度++,也就是parent->_bf–(因为平衡因子=右-左,现在左边高度+1,自然平衡因子=右 --(左+1));
如果,我们插入的节点,在parent这课树的右边的话,那么parent的右子树的高度++,也就是parent->_bf++(因为平衡因子=右-左,现在右边高度+1,自然平衡因子=右 +1–左);
因此,根据parent的更新过后_bf,就会有三种情况,我们就对这三种情况进行讨论:
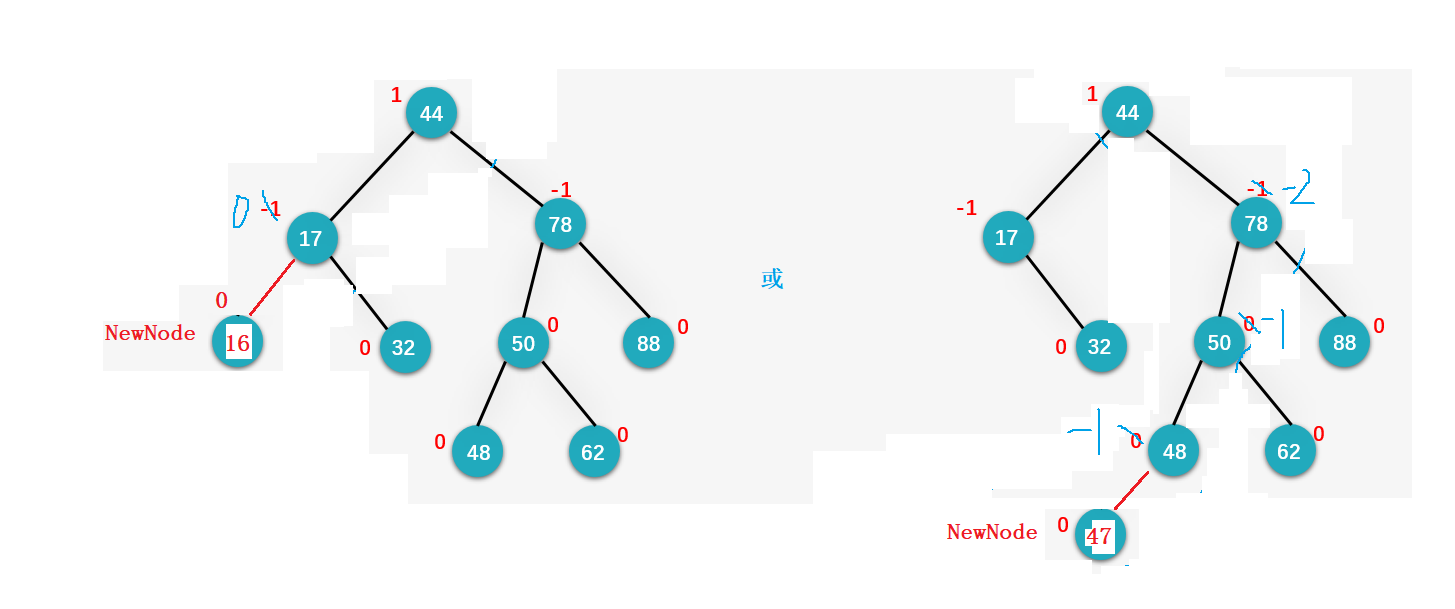
1、更新过后parent->_bf 的绝对值等于1;
跟新过后parent->_bf 的绝对值等于1,那么说明未插入节点之前,也就是未更新parent节点的平衡因子时,parent节点的平衡因子,一定是0,为什么如此肯定?如何验证我的说法?你凭什么怎么说?
我们可以这样验证:
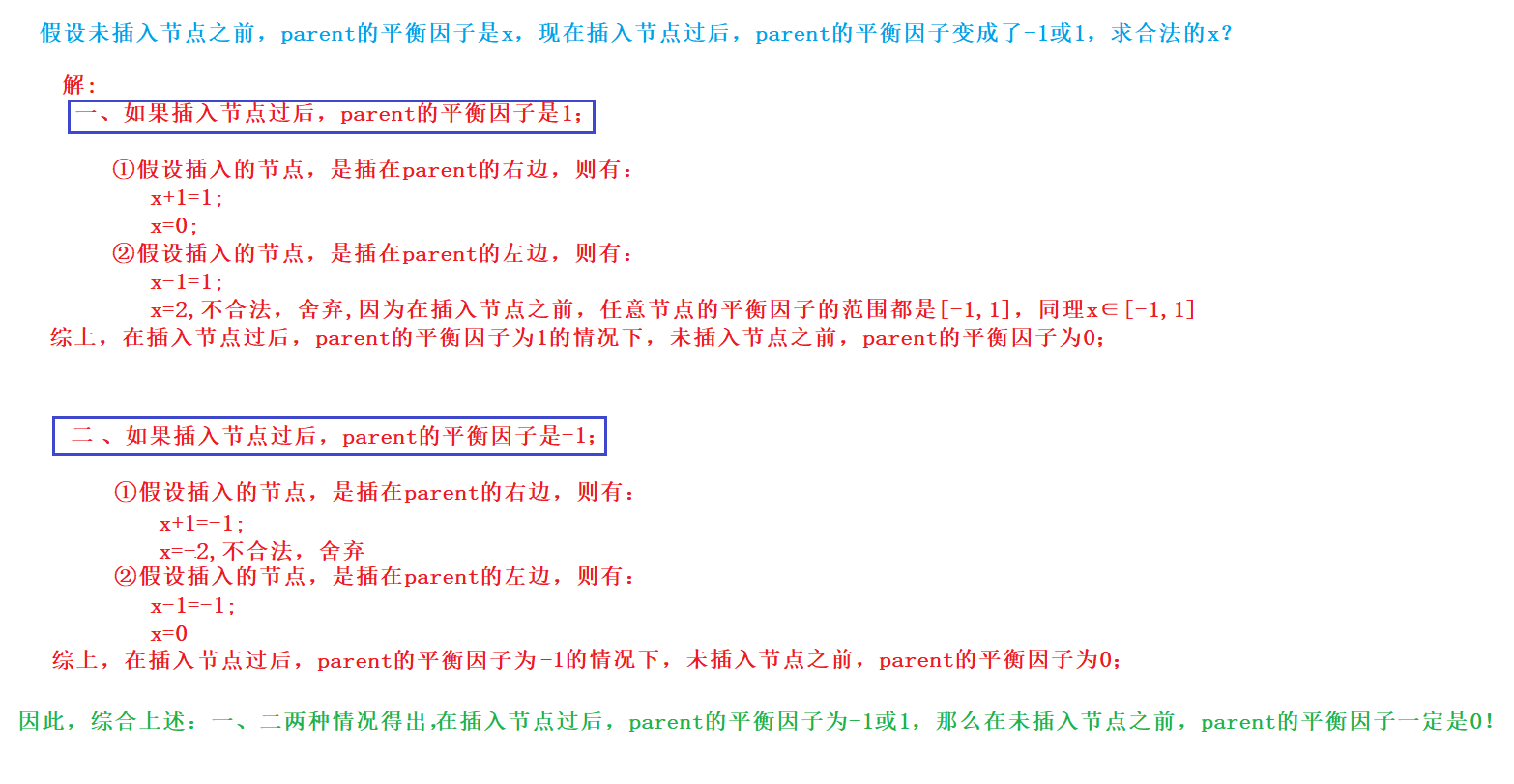
这样用数学的方法来证明,就一目了然了,因此就parent这课树来说,现在插入一个节点过后使其右子树-左子树的高度由0变为了-1或1,那么说明插入的节点一定是插在左右子树中任意的那一颗树中的;那么是不是说明在插入节点前后,parent这课树的高度发生了变化!
如果,我们明白了这一点,我们再来讨论,这时要不要继续跟新parent节点的parent节点的平衡因子,也就是是爷爷节点的平衡因子需不需要更新?答案是要的!
为什么,还是根据平衡因子的定义,平衡因子=右子树高度-左子树高度,现在爷爷节点的其中一颗树的高度是肯定不会变的,因为我们并没有向这课树中插入节点,我们是向另一颗树中插入的节点,也就是parent这课树中插入的节点,也就是说要不要更新爷爷节点的平衡因子,完全取决于parent这课树的高度是否变化!那么又如何验证parent这课树的高度是否发生变化?这不就取决于parent节点更新过后的平衡因子,有我们前面的证明可知,parent的平衡因子在更新过后变为了-1或1,这说明parent这棵树的高度发生了变化!因此我们需要继续向上调整爷爷节点,我们需要让parent往上走,向上继续调整平衡因子;
2、 更新过后parent->_bf 的绝对值等于0;
在插入节点过后parent节点的_bf变为了0,那么说明在插入节点之前,parent节点的平衡因子一定是-1或1(证明方法与前面无异),我们在推导一下:在插入节点前后,parent这课树右子树-左子树的高度差由-1或1变成了0,那么说明插入的这个节点一定是插入在parent的左右子树中最矮的一颗,你细品,仔细品!
那么说明,在插入节点前后,parent这课树的高度并没有发生变化,那么说明我们不必再更新爷爷节点及其祖先节点的平衡因子了!此次插入非常成功!很nice!我们可以提前结束本次插入了!
3、 更新过后parent->_bf 的绝对值等于2;
在插入节点过后parent节点的_bf变为了-2或2,那么说明在插入节点之前,parent节点的平衡因子一定是-1或1(证明方法与前面无异),那是不是说明,在插入节点前后,parent这课树右子树-左子树的高度由-1或1变成了-2或2,我们在深入挖掘一下,这个插入的节点是不是一定是插在左右子树中高的一颗子树中的!同时由于此时parent节点的平衡因子已经不满足,我们对于AVL树的要求了,我们必须将parent这课树调整为AVL树,我们所采取的办法就是:旋转!;
因此,我们可以先把AVL树的插入操作的大框架先写出来:
bool insert(const std::pair<K, V>& data)
{
Node* parent = nullptr;
Node* cur = _root;
if (_root == nullptr)//空树
{
_root = new Node(data);
return true;
}
while (cur)
{
parent = cur;
if (cur->_data.first == data.first)
return false;
else if (cur->_data.first > data.first)
cur = cur->_left;
else
cur = cur->_right;
}
cur = new Node(data);
//记住要维护父指针域
cur->_parent = parent;
if (parent->_data.first > cur->_data.first)
parent->_left = cur;
else
parent->_right = cur;
//插入一个节点过后,必定导致,cur这个节点的祖宗节点的平衡因子改变,我们需要跟新cur的父节点的平衡因子
while (parent)
{
//cur是parent的右子树中的孩子,parent右子树高度++,即:_bf++
if (cur->_data.first > parent->_data.first)
parent->_bf++;
else
parent->_bf--;
//检查更新过后的parent的平衡因子,然后做出不同的反应
if (parent->_bf == 0)
{
//更新过后parent的平衡因子为0,那么更新之前parent的平衡因子一定是 ±1 (可列方阵=程验证);
//这说明,新插入的节点,是插在parent矮的一颗子树上的,parent这棵树的高度不变,无需在更新祖宗节点的平衡因子;
//此次插入,非常成功
break;
}
else if (abs(parent->_bf) == 1)
{
//更新过后parent的平衡因子是 ±1 那么说明更新之前parent的_bf一定是0
//这说明在此次插入过后,parent这棵树的高度增加了,必须更新祖宗节点的_bf
parent = parent->_parent;//parent向上走
}
else if (abs(parent->_bf) == 2)
{
//旋转
}
else
{
//如果更新完过后parent->_bf等于1、-1、0、-2、2之外的数,不用说了,插入之前的AVL树就已经出问题了
assert(false);
}
}
return true;
}
AVL树的旋转(☆☆☆☆☆)
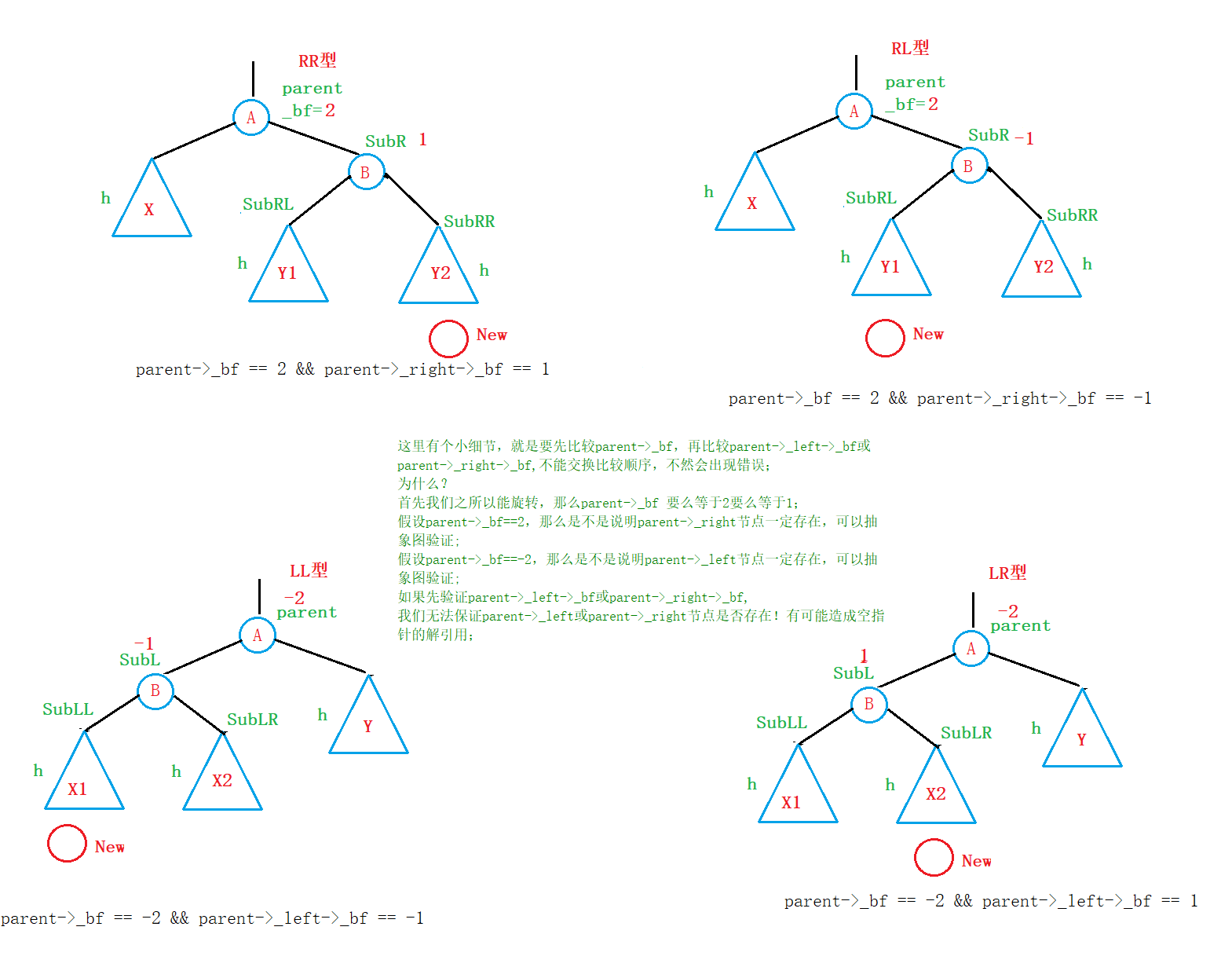
针对parent这课树的情况不同,又衍生出不同的旋转方法!
比如:LL型、RR型、LR型、RL型;
想必这些什么类型我们早就已经烂熟于耳了,只要我们一学到AVL树的旋转,这四种类型就会被老师反复的提出来!
可是!老师们只顾着告诉我们parent树有这4种需要旋转的情况,却没有告诉我们为什么会有这4种旋转情况?这四种情况究竟是怎么来的?这常常会让我们对AVL树的旋转而感到困惑,觉得AVL树的旋转很难!
接下来,我们就来谈一谈为什么AVL树的旋转会有这4种情况,以及这4种旋转是如何得来的:
- 首先,我们需要明白,我们什么时候需要进行旋转?
当然是更新过后parent-> _bf == -2或2的时候;- 我们要旋转什么?
旋转的是parent这课树,不是parent这个节点!- 旋转的目的?
①降低parent这棵树的高度;
②保证parent这棵树在旋转过后依旧是一个合法的AVL树;
③让整颗树在旋转过后,由一颗不合法的AVL树变为合法的AVL树!
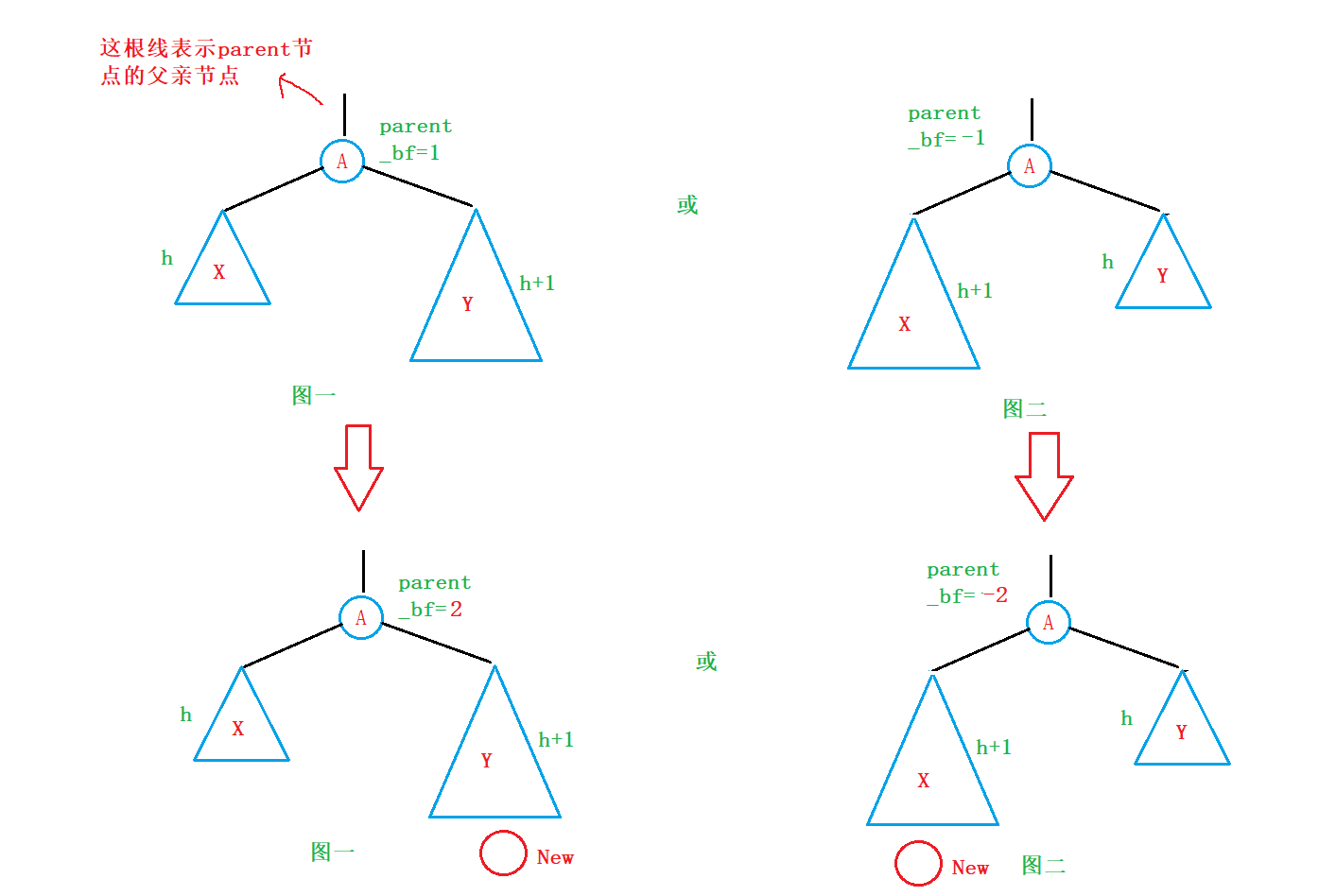
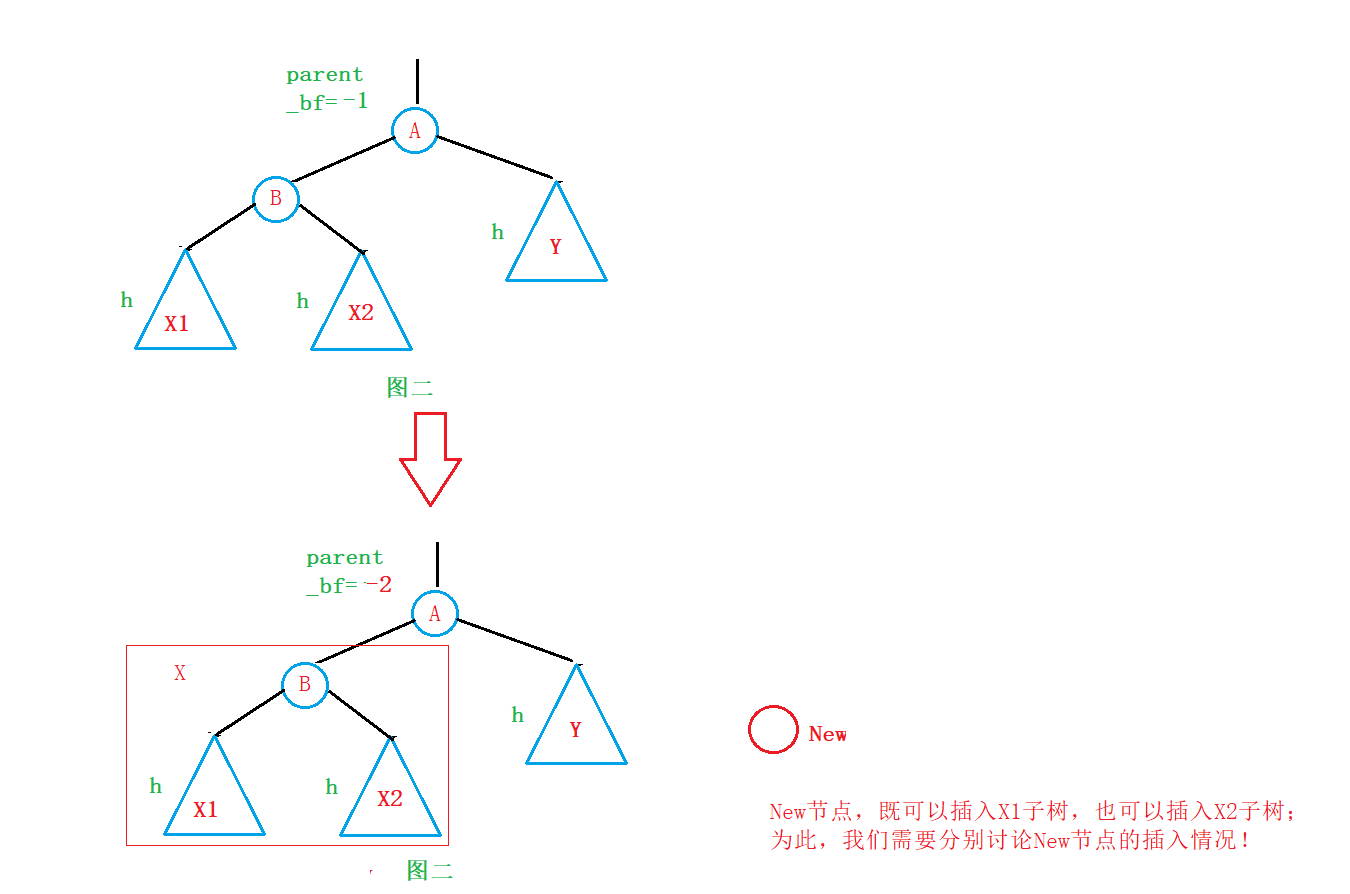
上面我们已经推出了,是在parent-> _bf == -2或2的时候进行旋转,在未插入节点之前,parent -> _bf等于-1或1,因此我们可以画出未插入节点之前parent这课树的抽象图:
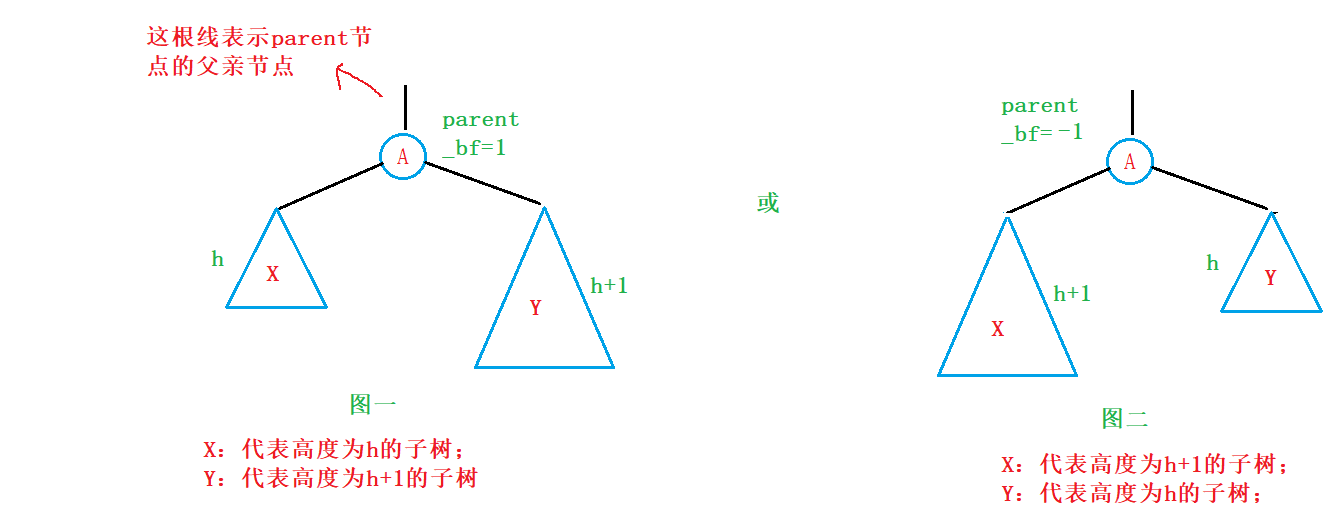
我们可以看到,根据未插入节点之前,parent节点的_bf 我们可以分别画出两幅对称的抽象图:
因此,对于图一来说:如果我们在插入节点过后想要使parent节点的 _bf 变为-2或2,那么我们只有将节点插入Y树中,只有插入Y树中,parent节点的的 _bf才有可能 变为-2或2,我为什么要加个有可能呢?因为我们在Y树中插入节点过后,并不能不保证Y树的高度变为h+2,也有可能在我们插入节点过后Y树的高度不变还是h+1,这样就不能使parent节点的 _bf 的平衡因子变为2了,但是嘛,至少还有希望!要是我们将节点插入在X树中去,那么parent节点的平衡因子一定不可能变为-2或2,因为在X树中插入节点,X树的高度可能为h或h+1,无论是哪一种情况都不能使parent节点的平衡因子变为-2或2;因此,要使parent节点的平衡因子变为-2或2,那么对于图一这种情况,我们只能将新节点插入在Y树中!
同理,对于图二的这种情况,我们也只能将节点插入在X树中!
因此针对这两种不同的情况,我们可以分开讨论:
一、假设插入节点过后,parent-> _bf == 2:
那么这种情况对应这图一的情况:
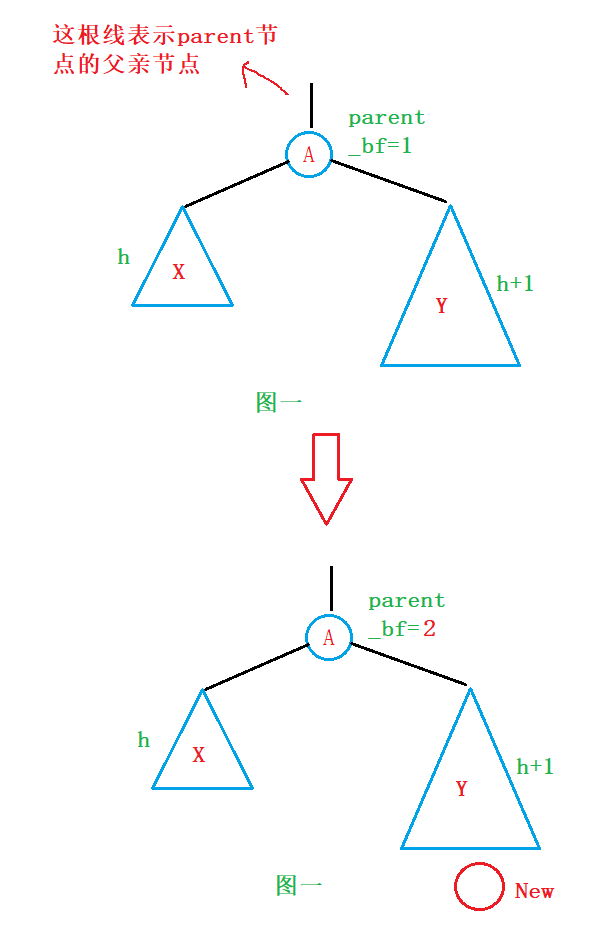
为了讨论的方便,我们可以做一个等效变换,我们将Y树等效为:
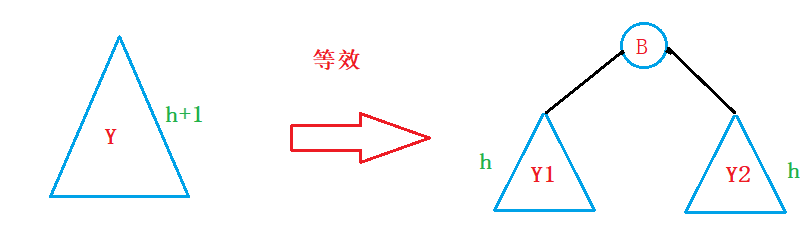
我们将其替换进图一:
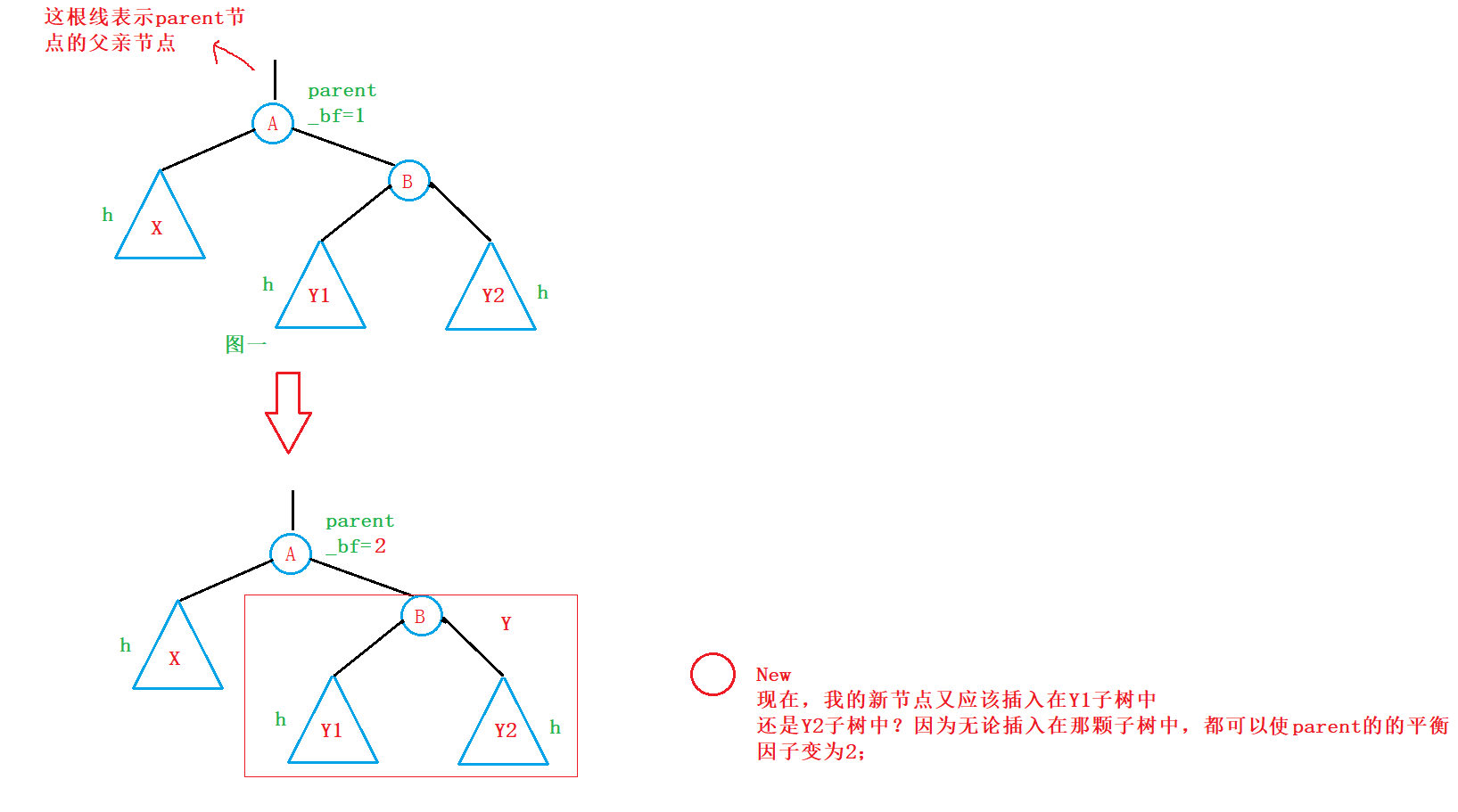
因此,对于新节点,我们是插入Y1子树中,还是Y2子树中,我们又得分开讨论:
①假设插入的节点插入在Y2子树中(RR型)
这里解释一下为什么叫RR型:插入节点插在parent的右节点的右子树中;
第一个R表示parent的右节点,第二个R表示parent的右节点的右子树;
为了表示方便,我们将parent的右节点用SubR表示,右节点的右子树用SubRR来表示:
右节点的左子树用SubRL来表示:
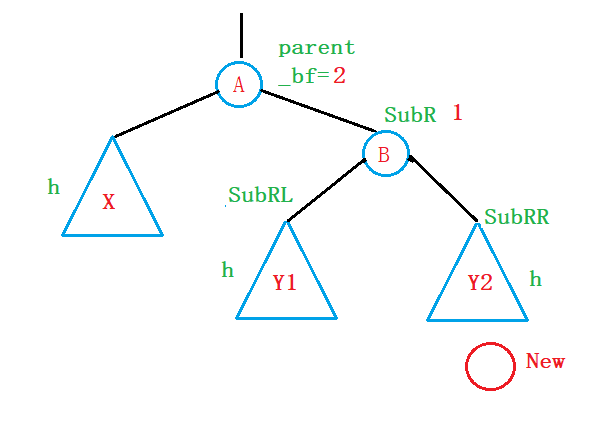
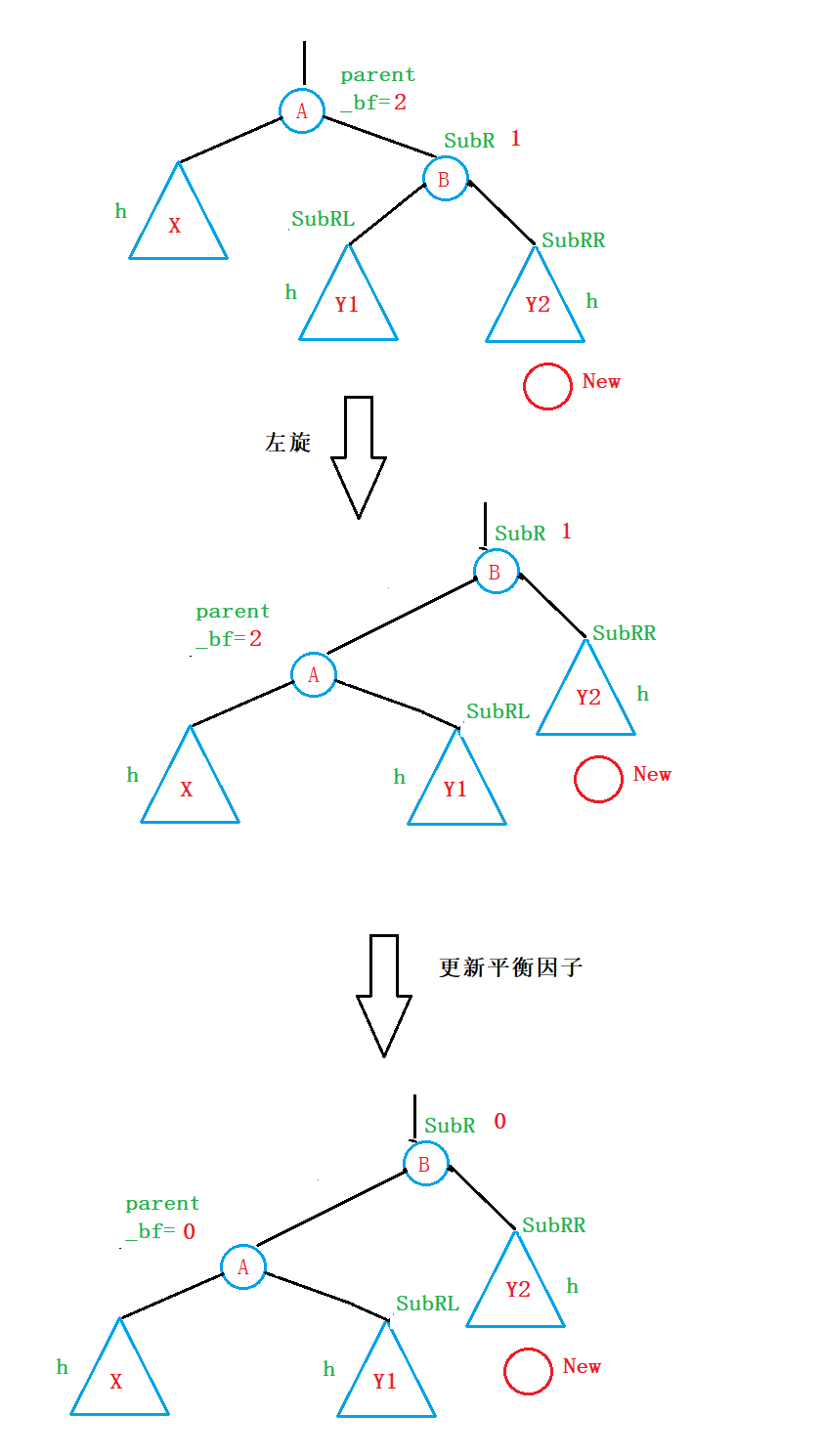
旋转方法:
- 让Y1子树作为parent节点的右子树;
- 让parent这课树作为SubR节点的左子树;
- 更新parent节点与SubR节点的平衡因子(都更新为0);
这种方法叫做左旋!
为什么这种旋转方法可行?
别忘了AVL树还是可二叉搜索树,Y1子树中的所有节点都是大于parent节点的吧!那么用Y1子树来充当parent的右子树,自然没问题啊,符合搜索二叉树的要求;好,现在parent这课树整体是小于SubR节点的吧!(parent1节点小于SubR节点,X子树也小于SubR节点,Y1子树也小于SubR节点)那么很自然的这种旋转方式是可行的:
通过检查旋转过后的平衡因子,我们发现,旋转过后所得到的子树是符合AVL树的条件的;
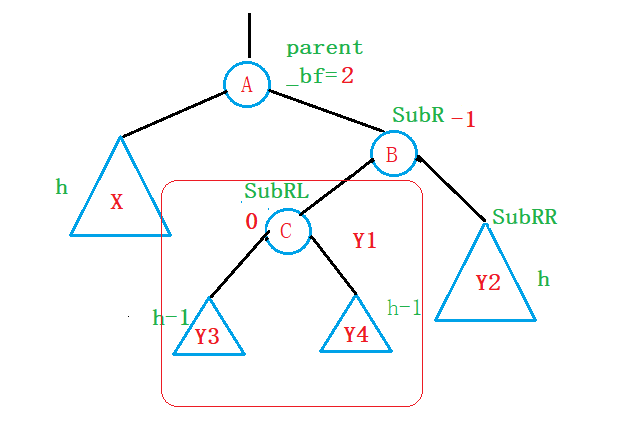
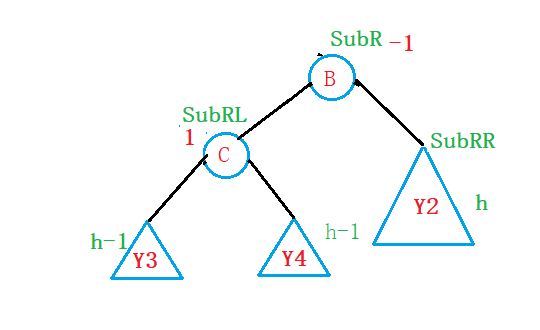
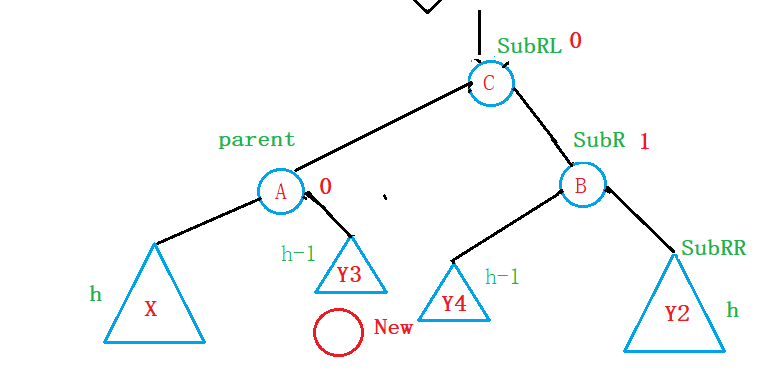
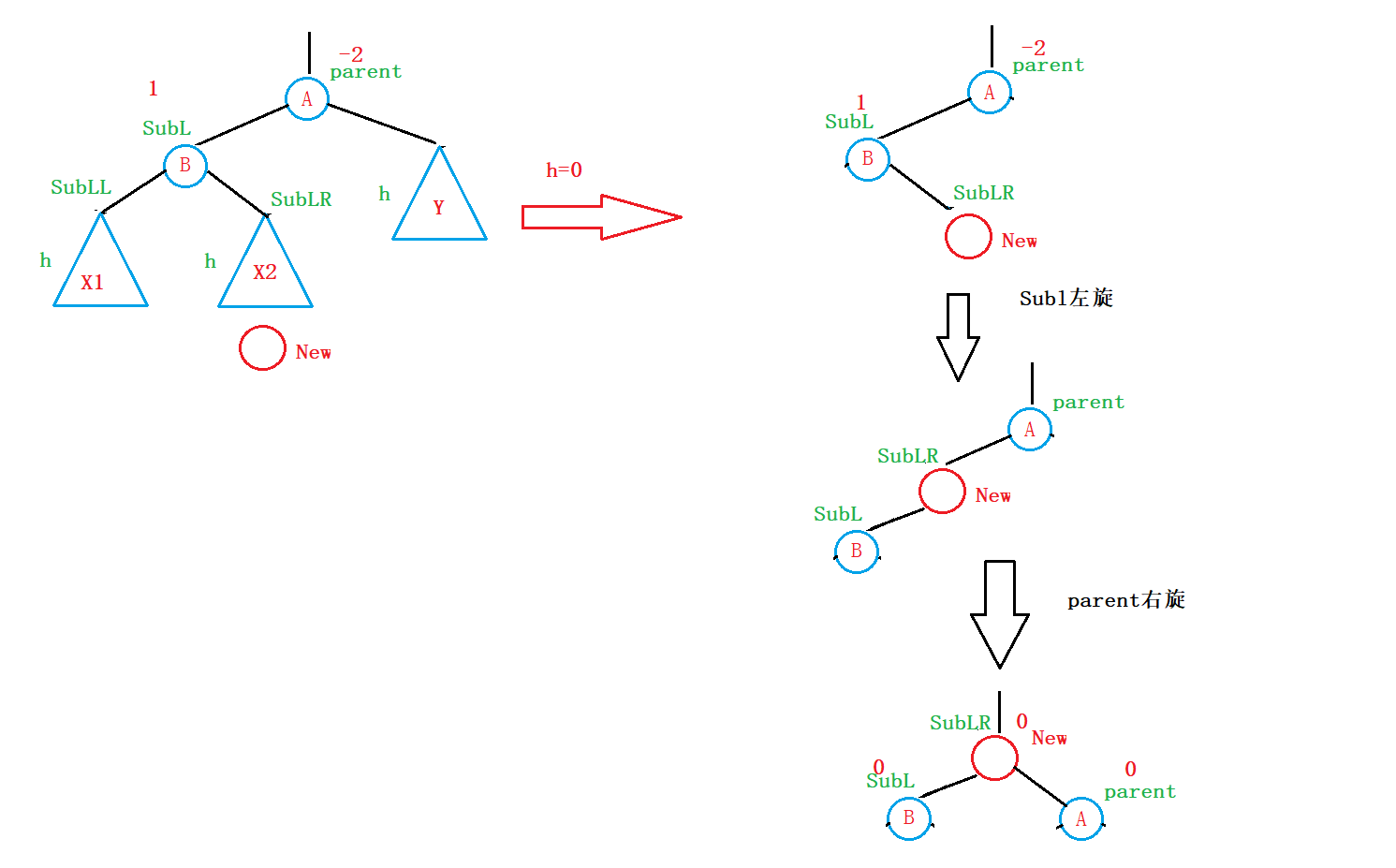
②假设插入的节点插入在Y1子树中(RL型)
这里解释一下为什么叫RL型:插入节点插在parent的右节点的左子树中;
第一个R表示parent的右节点,第二个L表示parent的右节点的左子树;
为了表示方便,我们将parent的右节点用SubR表示,右节点的右子树用SubRR来表示:
右节点的左子树用SubRL来表示:
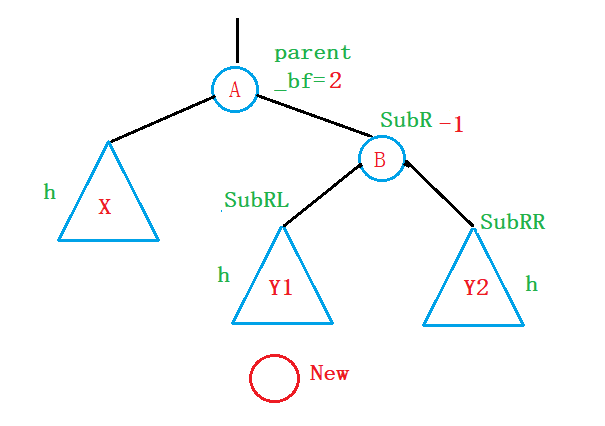
为此,对于这种情况,我们再次尝试利用左旋的方法来尝试一下:
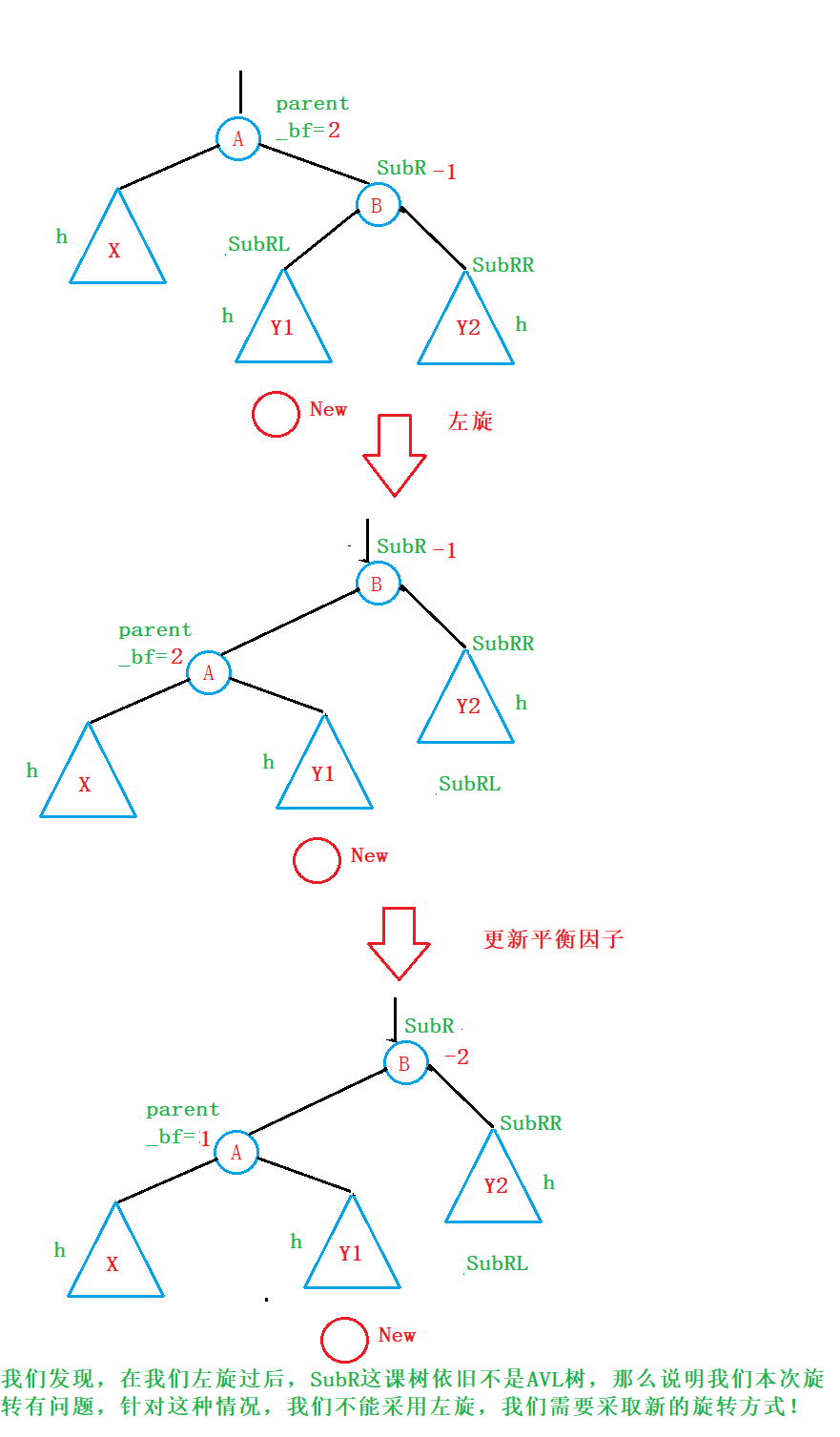
很显然,左旋的方法针对这种情况失效了,我们需要采取一种新的旋转方法;
旋转方法:
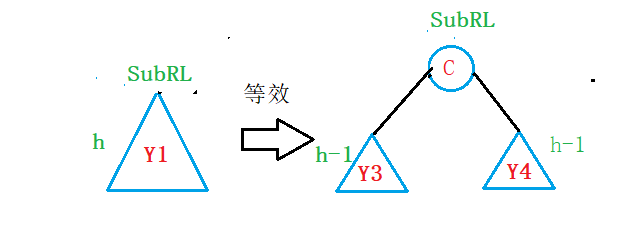
先将SubRL也就是Y1这颗树进行进行等效:
至此,我们替换一下原图:
因此,我们的New节点既可以插在Y3子树中,也可以插在Y4子树中,无论插在那边旋转的方式是一样的,只是最后更新parent、SubR、SubRL这三个节点的平衡因子时有所差别;
这里我们就不分类讨论了;
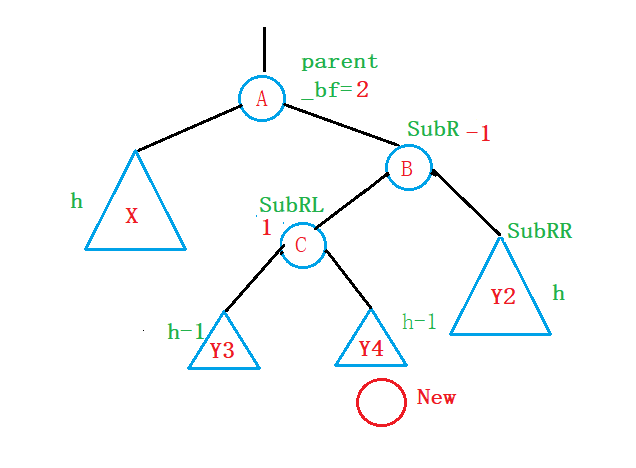
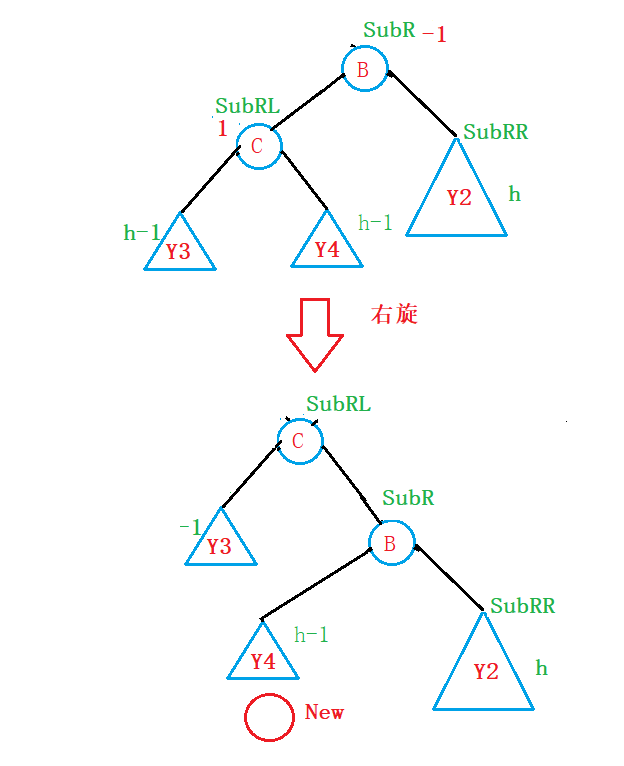
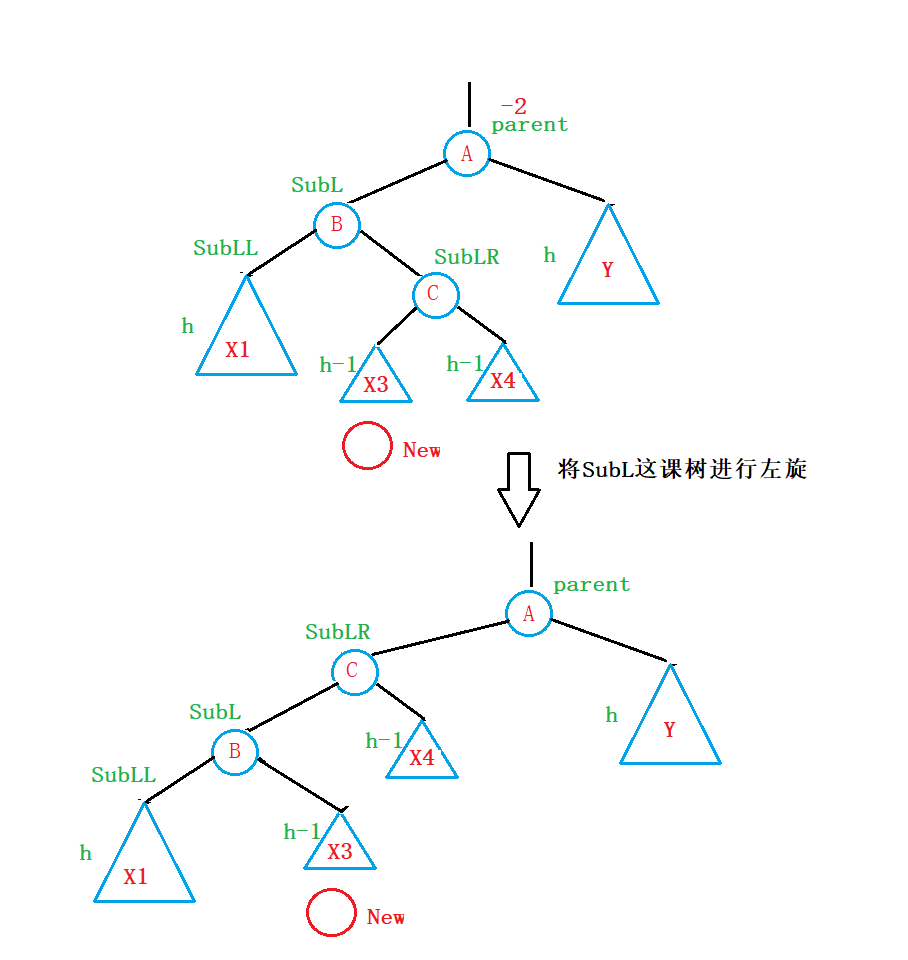
就先假设新节点就插入在Y4子树中:
因此,我们给出的旋转方式是:
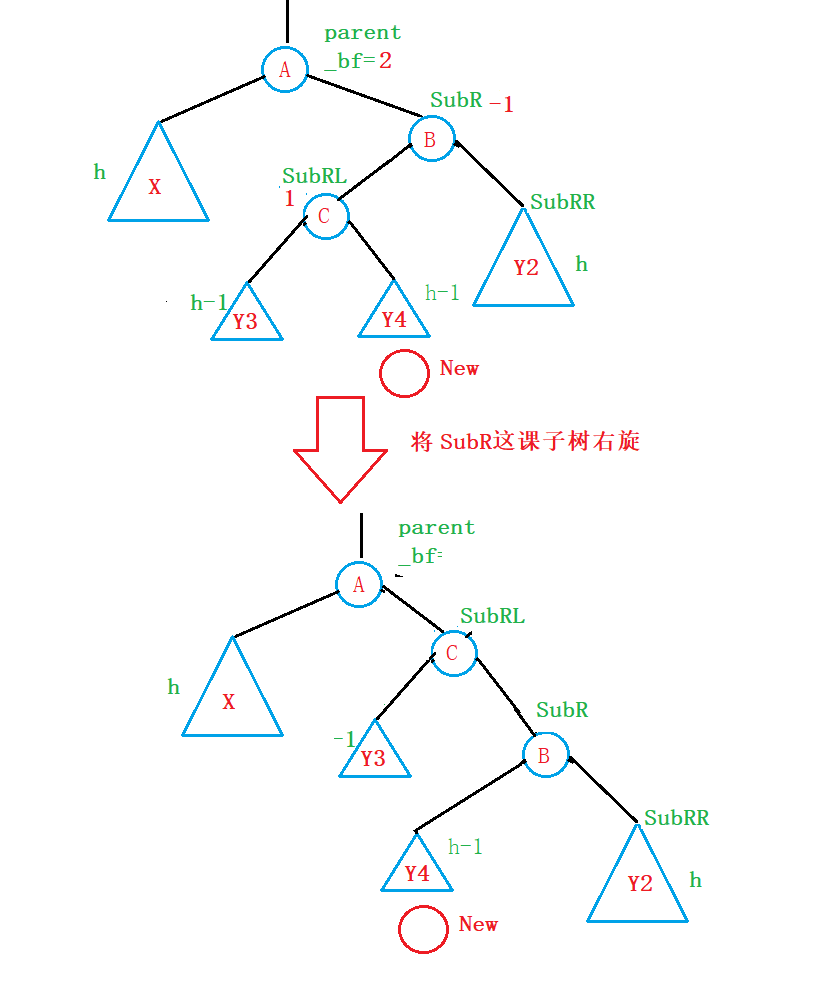
- 先将SubR这颗子树右旋:
何为右旋?
我们就以SubR这颗子树为例吧:
右旋:
a . Y4子树作为SubR节点的左子树;
b . 将SubR这课子树作为 SubRL节点的右子树;
c . 更新SubRL、SubR的平衡因子(都更新为0);
为什么可行?
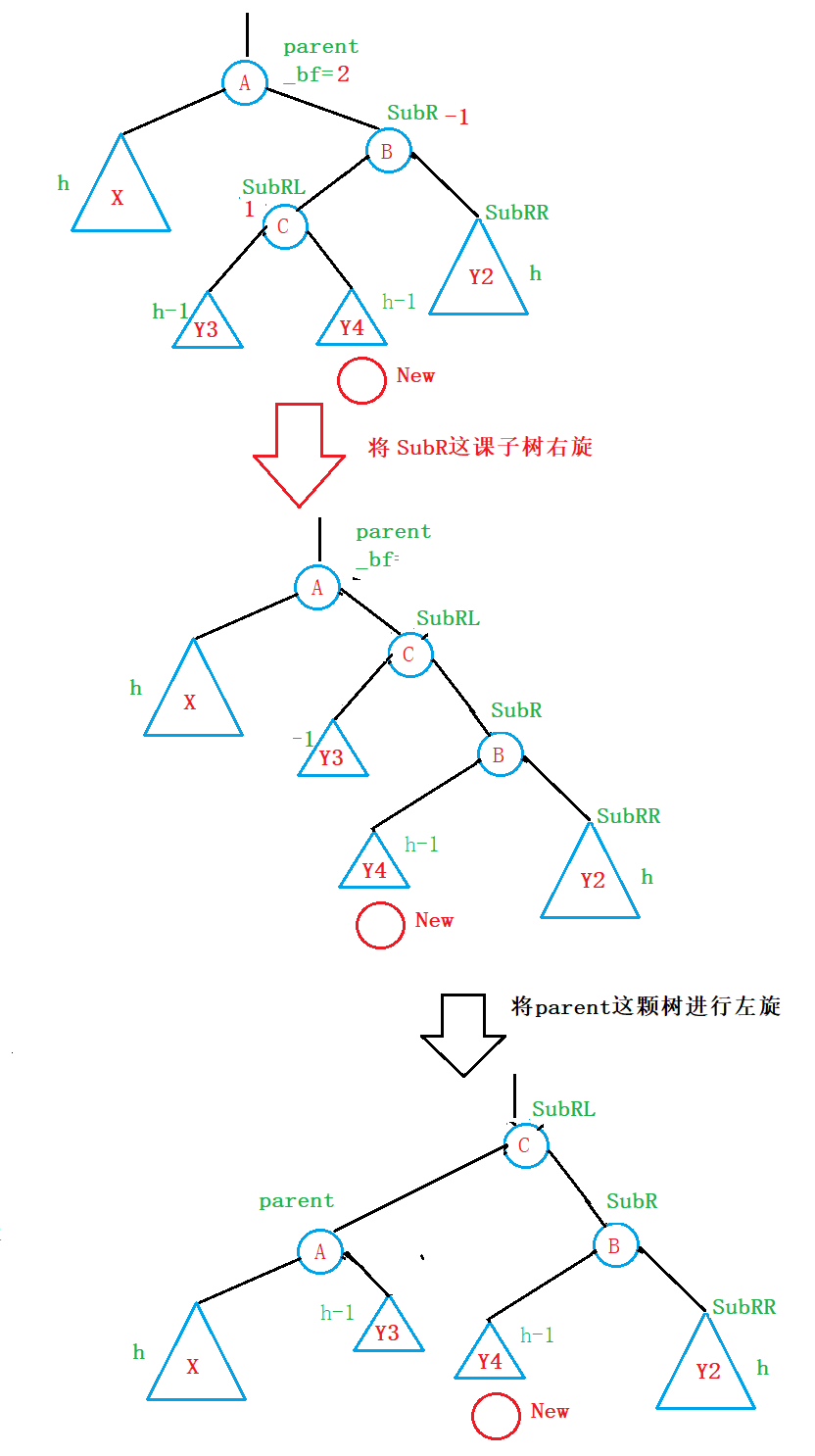
读者可以自行验证;- 通过右旋SubR这颗树,我们可以很明显的看出来,parent这课树变成了右边高,左边低,因此,对于这种情况,我们对于parent这课树进行左旋:
- 更新平衡因子:
更新平衡因子可是个大事,
根据新节点插入的子树不同,更新的平衡因子也是不同:
若新节点插在Y4中,则平衡因子的更新为:
SubR->_bf=0;
parent->_bf=-1;
SubR->_bf=0;
若新节点插在Y3中,则平衡因子的更新为:
SubR->_bf=0;
parent->_bf=0;
SubR->_bf=1;
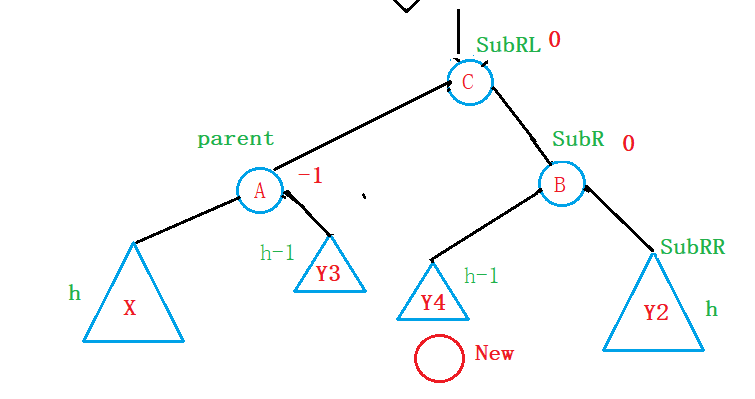
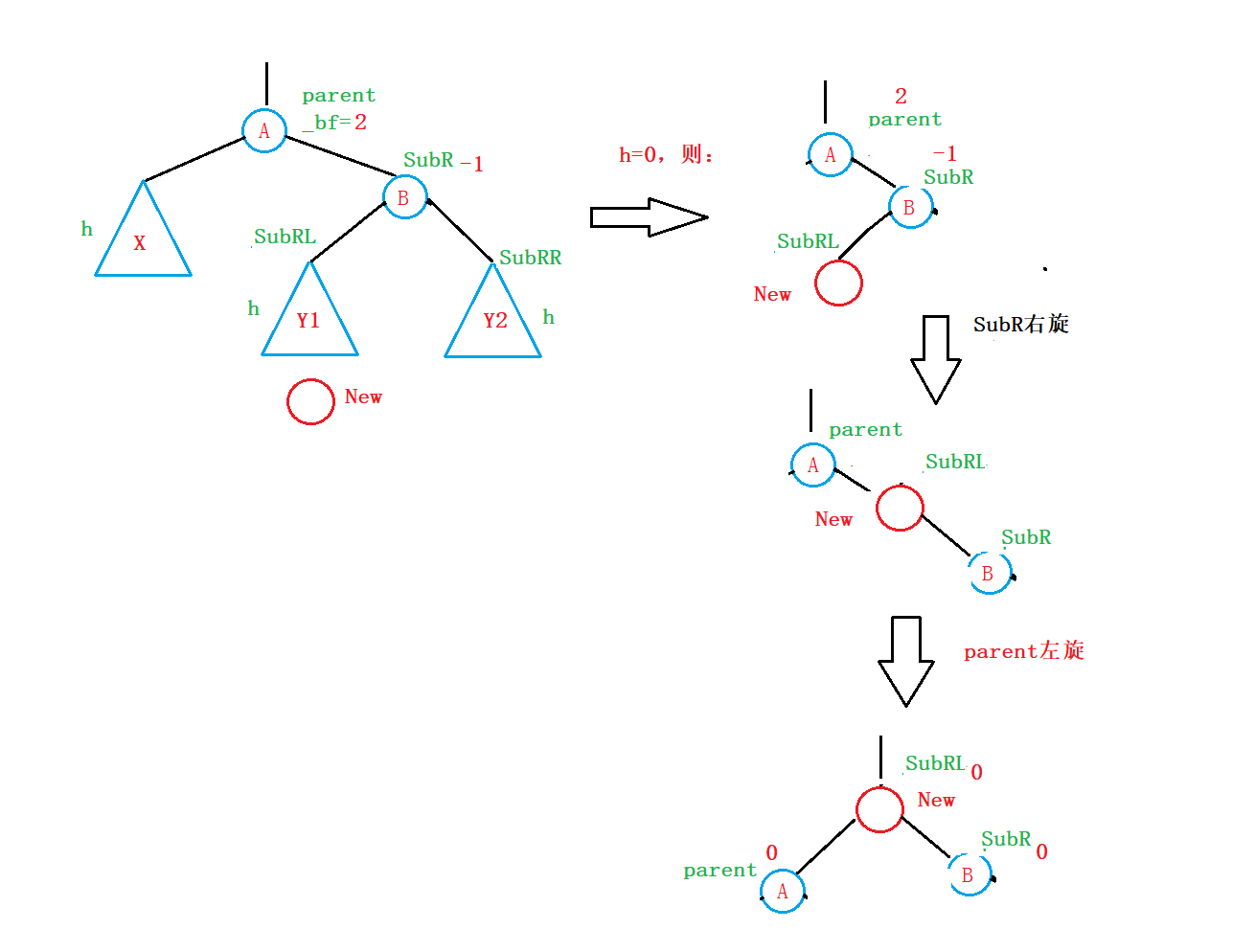
可是前面的插入,都是建立在Y3,Y4存在的情况,如果Y3、Y4子树不存在呢?
何为不存在?
正常情况下,h的取值是0、1、2、3、4、… 整数;
如果h=0,那么不就是Y3 ,Y4 不存在的情况嘛:
为此这时,我们的平衡因子更新为:
SubR->_bf=0;
parent->_bf=0;
SubR->_bf=0;
至此,我们完成了RL型的旋转以及平衡因子的更新!
二、假设插入节点过后,parent-> _bf == -2:
那么这种情况对应图二:
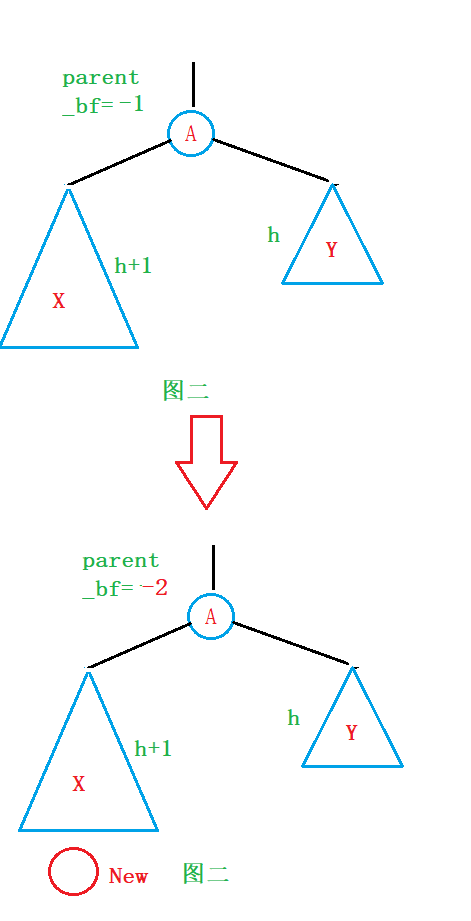
实际上parent-> _bf=-2这种情况,就是parent-> _bf =2 的对称变换,有了parent-> _bf=2这种情况的经验,我们再讨论这种情况时,就简单一点:
为了讨论的方便,我们可以做一个等效变换,我们将X树等效为:
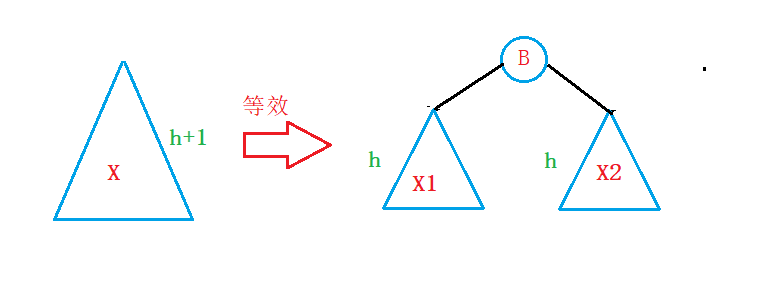
将其替换进图二:
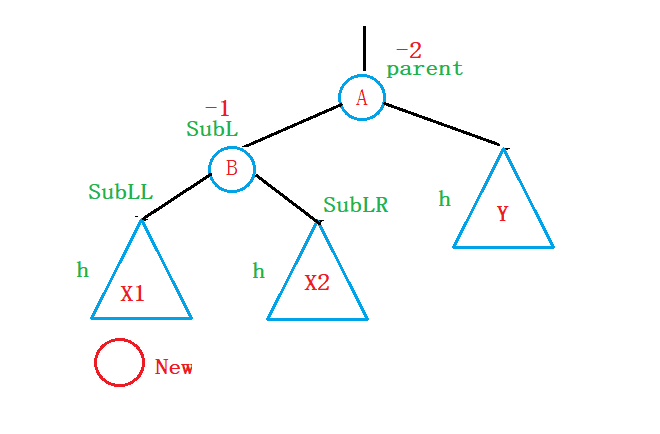
①假设插入的节点插入在Y1子树中(LL型)
这里解释一下为什么叫LL型:插入节点插在parent的左节点的左子树中;
第一个L表示parent的左节点,第二个L表示parent的左节点的左子树;
为了表示方便,我们将parent的左节点用SubL表示,左节点的右子树用SubLR来表示:
左节点的左子树用SubLL来表示:
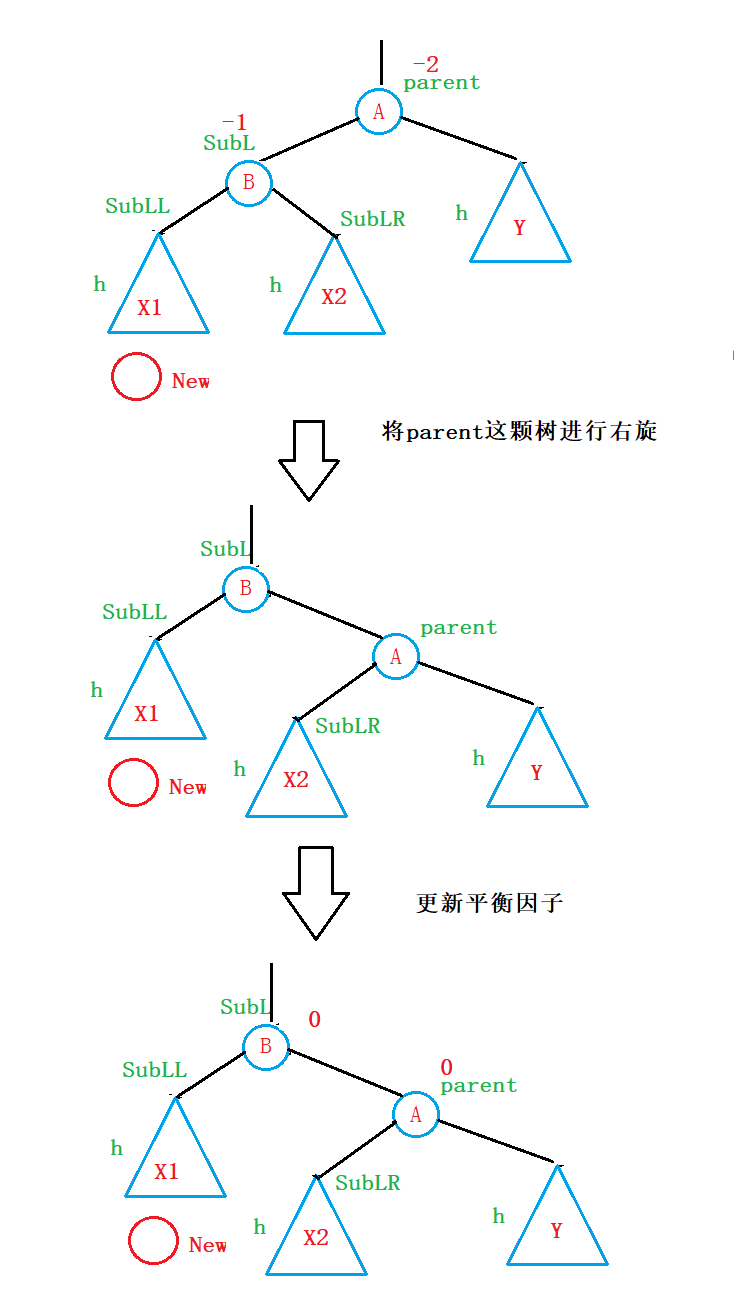
旋转方法:
- 将X2子树作为parent的右子树;
- 将parent这颗子树作为SubL节点的右子树;
- 更新parent节点、SubL节点的平衡因子(都是0);
这种方法叫做右旋!
为什么这种旋转方法可行?
首先,根据搜索二叉树的性质,X2这课子树是小于parent这个节点的,那么X2可以作为parent这个节点的左子树对吧!然后呢,parent这颗子树又是大于于SubL这个节点的对吧!(parent节点大于SubL节点、SubLR子树大于于SubL节点、Y子树大于SuL节点);这也就是为什么这种旋转方式行的原因;
通过检查旋转过后的平衡因子,我们发现,旋转过后所得到的子树是符合AVL树的条件的;
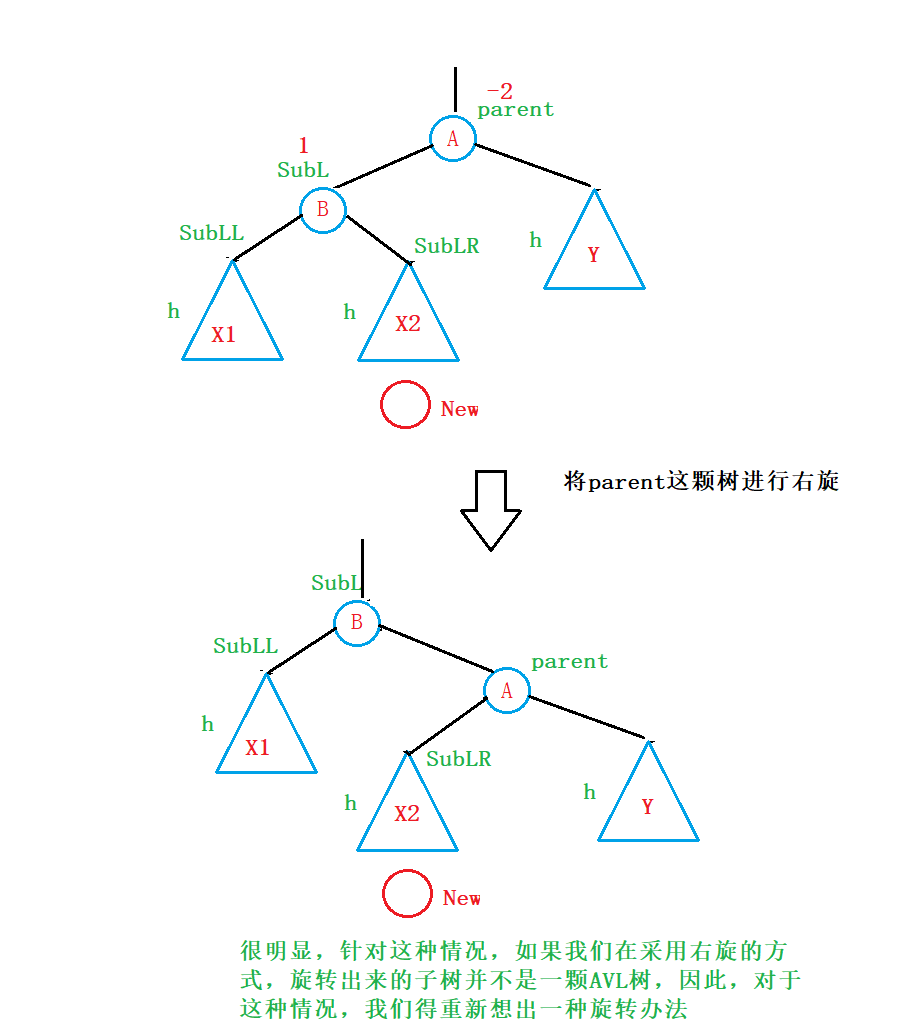
②假设插入的节点插入在X2子树中(LR型)
这里解释一下为什么叫LR型:插入节点插在parent的左节点的右子树中;
第一个L表示parent的左节点,第二个R表示parent的左节点的右子树;
为了表示方便,我们将parent的左节点用SubL表示,左节点的右子树用SubLR来表示:
左节点的左子树用SubLL来表示:
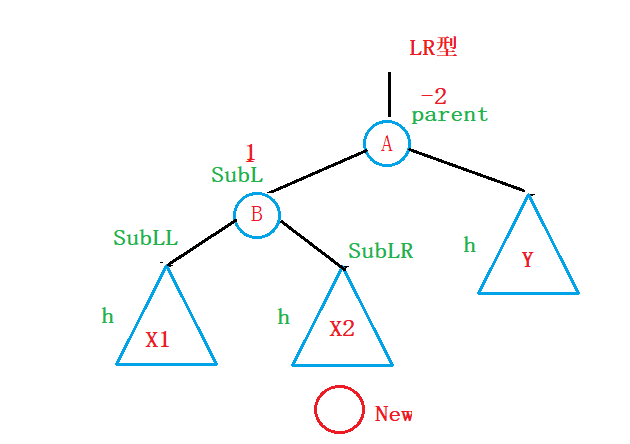
为此,对于这种情况,我们再次尝试利用右旋的方法来尝试一下:
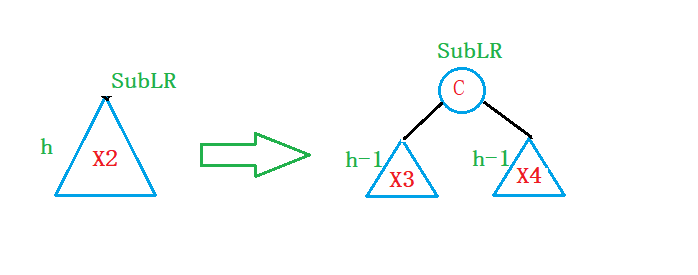
旋转办法:
为了方便问题的解决,我们将X2进行一下等效:
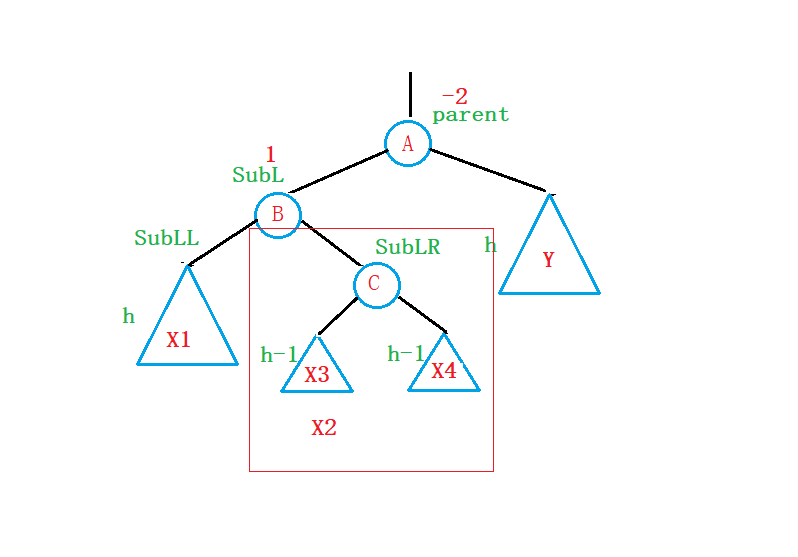
至此,我们替换一下原图:
因此,我们的New节点既可以插在X3子树中,也可以插在X4子树中,无论插在那边旋转的方式是一样的,只是最后更新parent、SubR、SubRL这三个节点的平衡因子时有所差别;
这里我们就不分类讨论了;
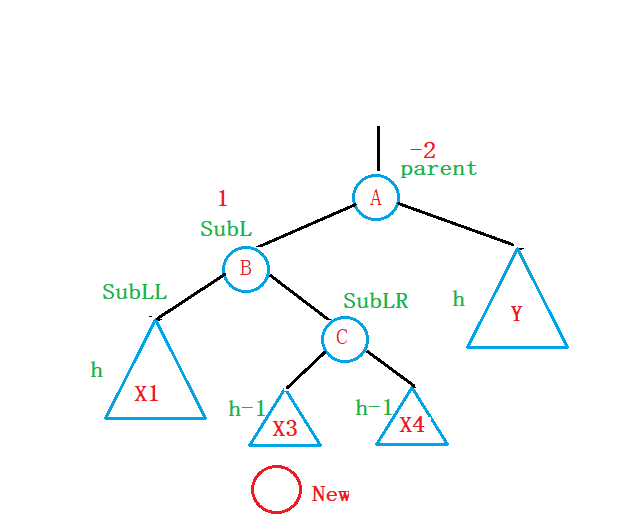
就先假设新节点就插入在X3子树中:
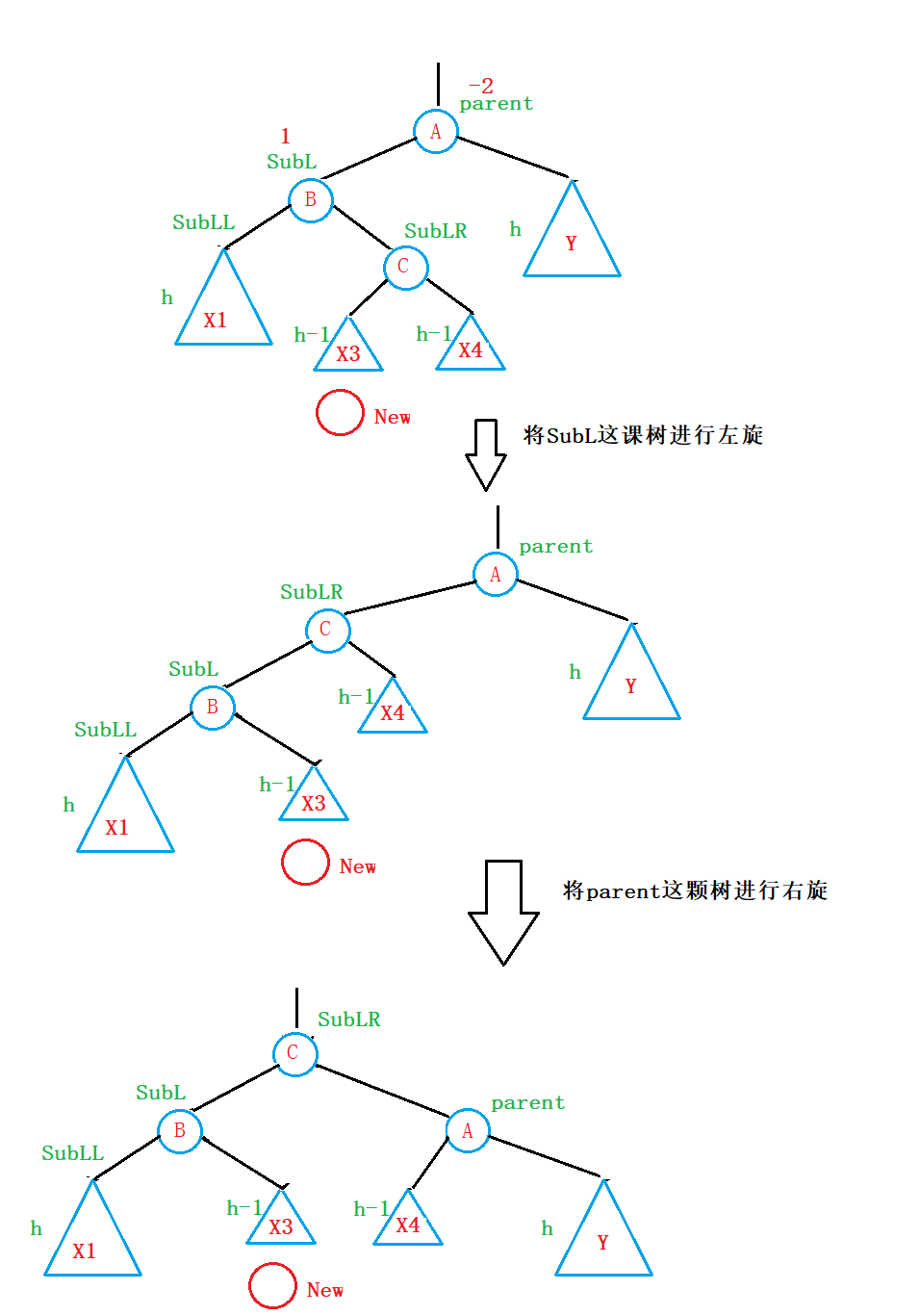
因此,我们给出的旋转方式是:
- 将SuL这颗树进行左旋:
- 将parent这颗树进行右旋:
3.更新平衡因子:
更新平衡因子可是个大事,
根据新节点插入的子树不同,更新的平衡因子也是不同:
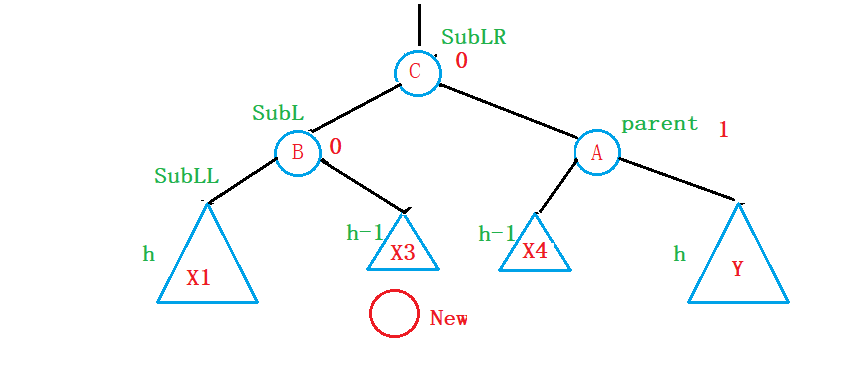
若新节点插在X3中,则平衡因子的更新为:
SubLR->_bf=0;
parent->_bf=1;
SubL->_bf=0;
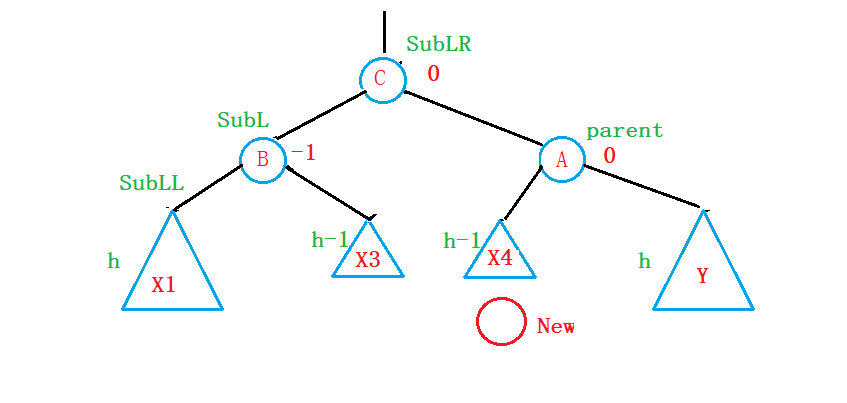
若新节点插在X4中,则平衡因子的更新为:
SubLR->_bf=0;
parent->_bf=0;
SubL->_bf=-1;
可是前面的插入,都是建立在X3,X4存在的情况,如果X3、X4子树不存在(X3、X4是空树也算存在)呢?
何为不存在?
正常情况下,h的取值是0、1、2、3、4、… 整数;
如果h=0,那么不就是X3 ,X4 不存在的情况嘛:
为此这时,我们的平衡因子更新为:
SubLR->_bf=0;
parent->_bf=0;
SubL->_bf=0;
至此,我们完成了LR型的旋转以及平衡因子的更新!
至此整个AVL树的插入的旋转就算是完成了;
如果,你能坚持看到这里,并对AVL树的旋转有了清晰的认识了,那我觉得这件事:

AVL树的插入操作的代码
bool insert(const std::pair<K, V>& data)
{
Node* parent = nullptr;
Node* cur = _root;
if (_root == nullptr)//空树
{
_root = new Node(data);
return true;
}
while (cur)
{
parent = cur;
if (cur->_data.first == data.first)
return false;
else if (cur->_data.first > data.first)
cur = cur->_left;
else
cur = cur->_right;
}
cur = new Node(data);
cur->_parent = parent;//记住要维护父指针域
if (parent->_data.first > cur->_data.first)
parent->_left = cur;
else
parent->_right = cur;
//插入一个节点过后,必定导致,cur这个节点的祖宗节点的平衡因子改变,我们需要跟新cur的父节点的平衡因子
while (parent)
{
//cur是parent的右孩子,parent右孩子_bf++
if (cur->_data.first > parent->_data.first)
parent->_bf++;
else
parent->_bf--;
//检查更新过后的parent的平衡因子,然后做出不同的反应
if (parent->_bf == 0)
{
//更新过后parent的平衡因子为0,那么更新之前parent的平衡因子一定是 ±1 (可列方阵=程验证);
//这说明,新插入的节点,是插在parent矮的一颗子树上的,parent这棵树的高度不变,无需在更新祖宗节点的平衡因子;
//此次插入,非常成功
break;
}
else if (abs(parent->_bf) == 1)
{
//更新过后parent的平衡因子是 ±1 那么说明更新之前parent的_bf一定是0
//这说明在此次插入过后,parent这棵树的高度增加了,必须更新祖宗节点的_bf
parent = parent->_parent;//parent、cur直接往上更新
}
else if (abs(parent->_bf) == 2)
{
//更新过后parent的平衡因子是 ±2 ,那么说明更新之前parent的_bf一定是±1;
//这说明,此时parent这课树已经失衡了,需要旋转parent这课树
//不平衡又有四种情况,这四种情况,对应不同的旋转方法
//这里有个小细节,就是要先比较parent->_bf,再比较parent->_left/parent->_right,不能交换比较顺序,不然会出现错误
if (parent->_bf == 2 && parent->_right->_bf == 1)//(RR型)
{
//parent左旋
RotateL(parent);
}
else if (parent->_bf == -2 && parent->_left->_bf == -1)//(LL型)
{
//parent右旋
RotateR(parent);
}
else if (parent->_bf == 2 && parent->_right->_bf == -1)//(RL型)
{
//先记录一下parent的右节点的左节点的_bf
Node* SubR = parent->_right;
Node* SubRL = SubR->_left;//放心这个节点一定存在,可证明
int bf = SubRL->_bf;
//1、先parent->_right右旋
RotateR(parent->_right);
//2、再parent左旋
RotateL(parent);
//这里我们需要重新更新一下平衡因子,因为单单的左旋、右旋只会将平衡因子置0,这是不正确的,需要我们手动调节
if (bf == -1)
{
SubRL->_bf = 0;
parent->_bf = 0;
SubR->_bf = 1;
}
else if (bf == 1)
{
SubRL->_bf = 0;
SubR->_bf = 0;
parent->_bf = -1;
}
else if (bf == 0)
{
SubRL ->_bf= 0;
SubR ->_bf= 0;
parent->_bf = 0;
}
else
{
assert(false);
}
}
else if (parent->_bf == -2 && parent->_left->_bf == 1)//(LR型)
{
Node* SubL = parent->_left;
Node* SubLR = SubL->_right;//放心这个节点一定存在,可证明
int bf = SubLR->_bf;
//1、先parent->_left左旋
RotateL(parent->_left);
//2、再parent右旋
RotateR(parent);
//平衡因子调节
if (bf == -1)
{
SubLR->_bf = 0;
SubL->_bf = 0;
parent->_bf = 1;
}
else if (bf == 1)
{
SubLR->_bf = 0;
SubL->_bf = -1;
parent->_bf = 0;
}
else if (bf == 0)
{
SubLR->_bf = 0;
SubL->_bf = 0;
parent->_bf = 0;
}
else
{
assert(false);
}
}
else
{
//不用说了,插入之前的AVL树就已经出问题了
assert(false);
}
//无论哪种旋转,旋转完毕过后,头结点平衡因子都为0了,
//这课树已经平衡了,不需要在向上调整了
break;
}
else
{
//如果更新完过后parent->_bf等于1、-1、0、-2、2之外的数,不用说了,插入之前的AVL树就已经出问题了
assert(false);
}
}
return true;
}
void RotateR(Node* parent)
{
Node* SubL = parent->_left;
Node* SubLR = SubL->_right;
Node* ppNode = parent->_parent;
parent->_left = SubLR;
if (SubLR)//SubLR节点存在
SubLR->_parent = parent;
SubL->_right = parent;
parent->_parent = SubL;
if (ppNode == nullptr)//parent是根节点
{
SubL->_parent = nullptr;
_root = SubL;
}
else
{
SubL->_parent = ppNode;
if (ppNode->_data.first > SubL->_data.first)
ppNode->_left = SubL;
else
ppNode->_right = SubL;
}
SubL->_bf = 0;
parent->_bf = 0;
}
void RotateL(Node* parent)
{
Node* SubR = parent->_right;//这个节点一定存在,可以证明
Node* SubRL = parent->_right->_left;//这个节点就不一定存在了
Node* ppNode = parent->_parent;//提前记录一下parent的父亲
//开始链接SubRL节点
parent->_right = SubRL;
if (SubRL)//只有当这个节点存在时,才需要维护器=其父亲节点
SubRL->_parent = parent;
//开始链接parent节点
SubR->_left = parent;
parent->_parent = SubR;
//开始链接SubR节点
if (ppNode == nullptr)//如果parent就是根,那么需要更新根节点
{
SubR->_parent = nullptr;
_root = SubR;
}
else//parent不是根节点
{
SubR->_parent = ppNode;
if (ppNode->_data.first > SubR->_data.first)
ppNode->_left = SubR;
else
ppNode->_right = SubR;
}
//更新平衡因子
SubR->_bf = 0;
parent->_bf = 0;
}
代码中的细节
AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个节点的左右子树高度差的绝对值都不超过1,这
样可以保证查询时高效的时间复杂度,即
l
o
g
2
(
N
)
log_2 (N)
log2(N)。但是如果要对AVL树做一些结构修改的操
作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,
有可能一直要让旋转持续到根的位置。因此:如果需要一种查询高效且有序的数据结构,而且数
据的个数为静态的(即不会改变),可以考虑AVL树,但一个结构经常修改,就不太适合。