2010 MDM
1 ST-matching的问题
论文笔记:Map-Matching for low-sampling-rate GPS trajectories(ST-matching)_UQI-LIUWJ的博客-CSDN博客
当轨迹很长,且车辆通过多线平行的道路时,ST-Matching的效果较差,出现Z形结果的明显错误
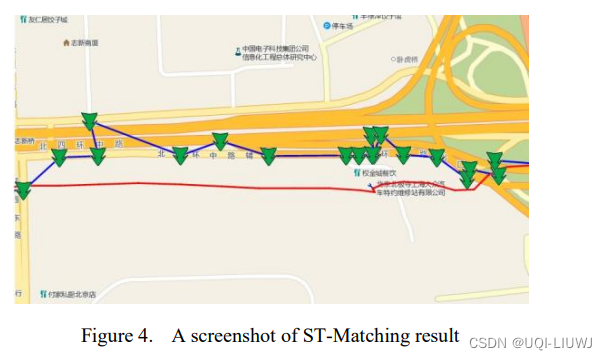
【我的理解:ST-matching在计算空间分析函数的时候,虽然使用的是两个candidate点之间的路径距离,但是在得到candidate以还原轨迹的时候,是直接把最可能的candidate连起来的,所以会出现横穿北四环的情况】
出现这种错误的原因是
- 计算相似时仅考虑相邻候选点,而实际上应当考虑所有附近的点。
- 权重打分使用简单的求和,忽略了距离的影响。
- 如果一个点被错分了,那么后续的节点都会基于此计算,造成误差累计。
——>论文提出了IVMM,通过voting的方式,综合考虑所有的采样点之间的关系,以找到最优路径
2 IVMM算法
2.1 构建候选点图
2.1.0 获得候选点
这一步和ST-matching一样:
- 给定一条确定轨迹
- 对每一个点pi,在半径为r的范围内搜索该路段的候选集
- 然后计算候选点,候选点是pi对这些路段的投影


2.1.1 构建候选点图
这一步也是和ST-matching一样,每两个candidate之间的边权重为:

详细内容可见:论文笔记:Map-Matching for low-sampling-rate GPS trajectories(ST-matching)_UQI-LIUWJ的博客-CSDN博客

2.2 不同采样点之间的转移关系
这里开始就和ST-matching不一样了
2.2.1 static score matrix
candidate的状态转移概率矩阵按对角矩阵拼起来得到
- 其中
,也就是相邻两个采样点i-1和i中各个candidate之间的转移概率矩阵
- 其中

2.2.2 Weighted Influence Modeling
- 为每个采样点p定义一个(n-1)维的距离权重(对角)矩阵Wi,表示点p与其他采样点间的权重关系
- 权重关系用欧式距离表示,距离越大权重越小。

2.2.3 Weighted Score Matrix
- Static score matrix M可以看成一个由n-1个block组成的对角矩阵
- 每一个采样点的距离权重矩阵Wi也是一个n-1阶对角矩阵
- wi的每个元素和M对应block的每个元素相乘,得到weighted score matrix:
- Φi表示从采样点pi的视角看,各个candidate之间的加权转移概率
- 距离采样点pi越近的点,权重越大,表示从pi视角看,影响(可信度)越大
- ——>得到一组共n个加权得分矩阵,表示从不同采样点的视角下看,各个转移概率的情况


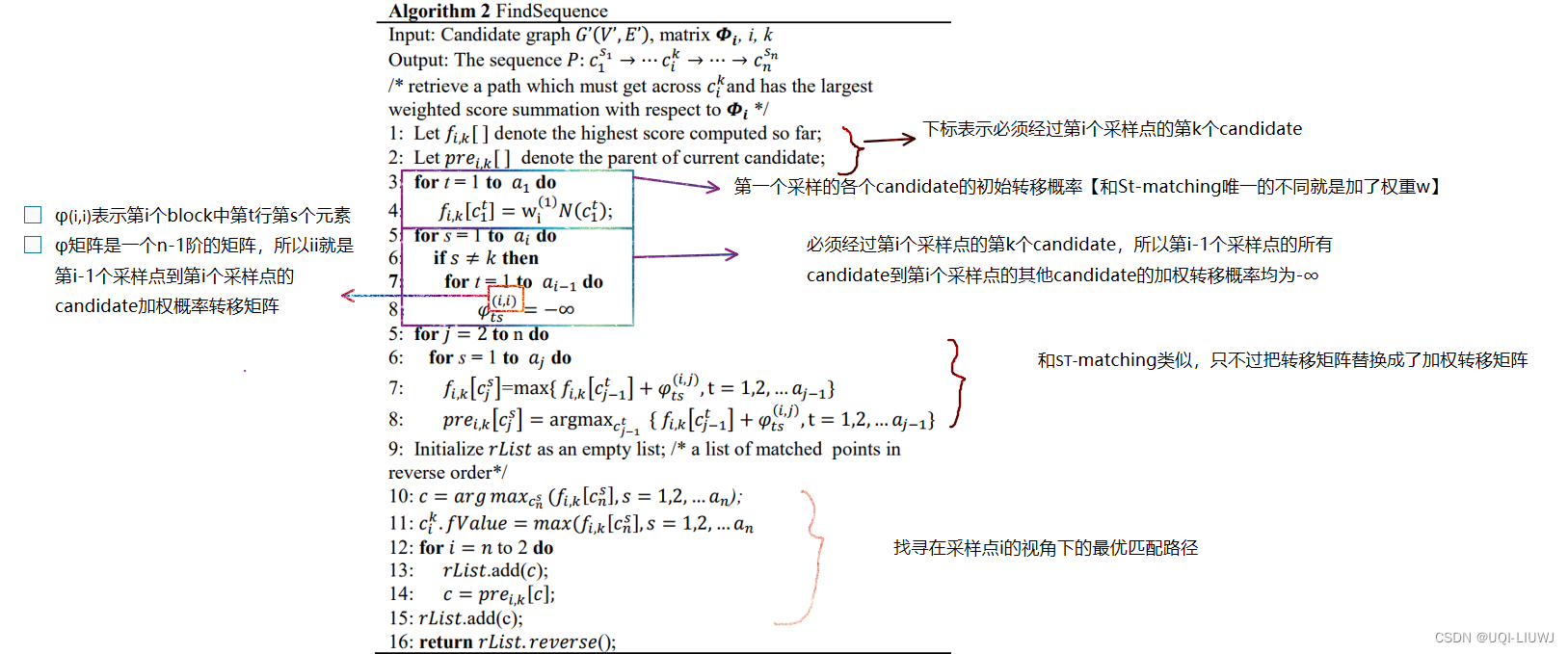
2.3 VIMM算法

2.4 举例
不用VIMM的时候,路线就是1112

VIMM voting之后,路径为1123


3 实验
3.1 实验数据
真实数据和st-matching一样,都是北京的数据
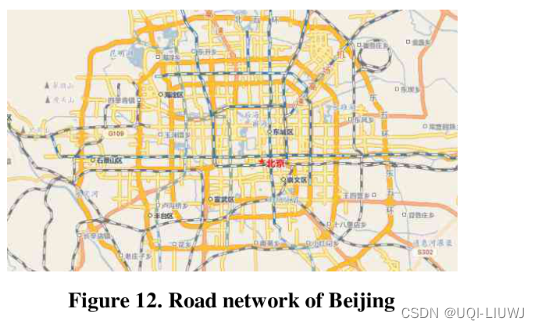
- 北京的路网
- 58624个点
- 130714条路段
- 真实数据
- 从GoeLife系统中采集26条轨迹,这些轨迹都手工标注的label(作为ground truth

3.2 比较的metric

3.3 结果
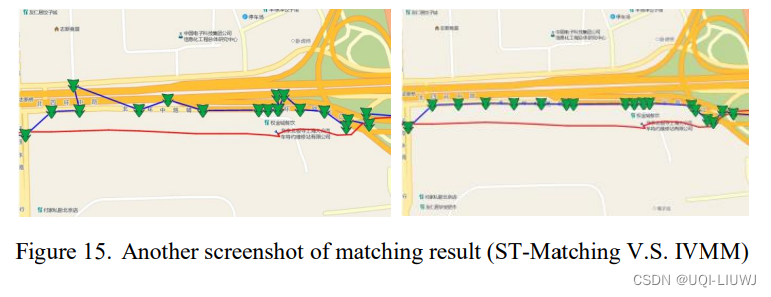
3.3.1 可视化结果

3.3.2 准确度




![[极客大挑战 2019]Havefun、[ACTF2020 新生赛]Include、[SUCTF 2019]EasySQL](https://img-blog.csdnimg.cn/070d1f4a3cd34343b6856dccaa6c8a7e.png)