目录
一、固高示波器
二、基于QCustomPlot实现示波器
三、完整源码
一、固高示波器
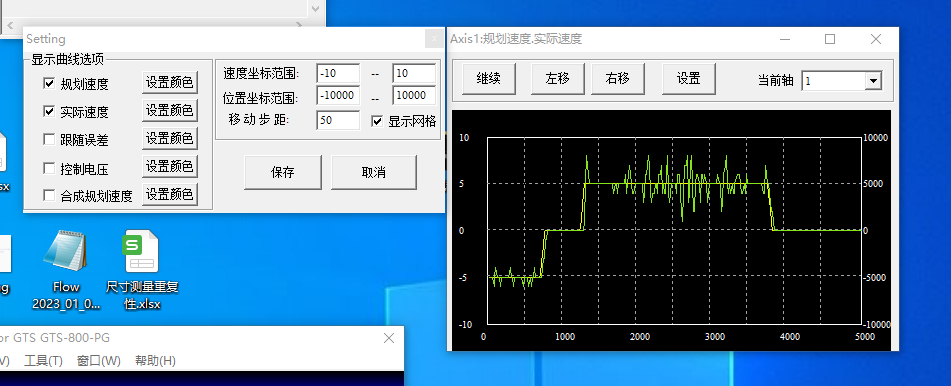
固高运动控制卡自带的软件有一个示波器功能,可以实时显示速度的波形,可辅助分析电机的运行状态。但是我们基于sdk开发了自己的软件,无法再使用该功能,原因是2个软件不能同时与控制卡通信,故此需要我们自己再开发一个示波器。
固高示波器功能展示,功能包括多条曲线的显示、继续/暂停、左移、右移、设置、轴选择等。
二、基于QCustomPlot实现示波器
GCustomPlot简介与使用看官网就可以了
简介, Qt Plotting Widget QCustomPlot - Introduction
下载, Qt Plotting Widget QCustomPlot - Download
需要注意的是需要在pro文件中加入printsuppot模块,源码中使用该模块做pdf打印功能
QT += printsupport参考固高的功能实现速度示波器效果如下

QCustomPlot初始化设置
m_customPlot = new QCustomPlot(this);
m_customPlot->setObjectName(QLatin1String("customPlot"));
ui->vlyPlot->addWidget(m_customPlot);
m_customPlot->setBackground(QBrush(QColor("#474848")));
m_customPlot->setInteractions(QCP::iRangeDrag | QCP::iRangeZoom |
QCP::iSelectPlottables); /* 可拖拽+可滚轮缩放 */
m_customPlot->legend->setVisible(true);添加两条曲线图,addGraph
m_customPlot->addGraph();
m_customPlot->graph(0)->setPen(QPen(Qt::green, 3));
m_customPlot->graph(0)->setName(QStringLiteral("实际速度"));
m_customPlot->addGraph();
m_customPlot->graph(1)->setPen(QPen(Qt::yellow, 3));
m_customPlot->graph(1)->setName(QStringLiteral("规划速度"));左右移动,通过设置X轴的范围来改变,再使用replot函数更新视图
m_customPlot->xAxis->setRange(m_customPlot->xAxis->range().lower - ui->spbStep->value(),
m_customPlot->xAxis->range().upper - ui->spbStep->value());
m_customPlot->replot();网格线显示与隐藏
m_customPlot->xAxis->grid()->setVisible(checked);
m_customPlot->yAxis->grid()->setVisible(checked);
m_customPlot->replot();添加数据,示波器有向左自动滚动的效果,也是通过设置范围来实现
void OscilloscopeFrame::addData(double key, double actVel, double prfVel)
{
m_customPlot->graph(0)->addData(key, actVel);
m_customPlot->graph(1)->addData(key, prfVel);
m_customPlot->xAxis->rescale();
m_customPlot->graph(0)->rescaleValueAxis(false, true);
m_customPlot->graph(1)->rescaleValueAxis(false, true);
m_customPlot->xAxis->setRange(m_customPlot->xAxis->range().upper,
m_fixedLength, Qt::AlignRight);
m_customPlot->replot(QCustomPlot::rpQueuedReplot); /* 实现重绘 */
}实时显示数据,通过定时器实现
m_timer = new QTimer();
connect(m_timer, &QTimer::timeout, updateData);
m_timer->start(OSCILLOSCOPE_UPDATE_MSEC);鼠标放在曲线上显示当前值,关联鼠标移动信号,映射坐标pixelToCoord
connect(m_customPlot, SIGNAL(mouseMove(QMouseEvent *)), this,
SLOT(plotMouseMoveEvent(QMouseEvent *)));void OscilloscopeFrame::plotMouseMoveEvent(QMouseEvent *event)
{
if ( Qt::ControlModifier == event->modifiers())
{
int x_pos = event->pos().x();
int x_val = m_customPlot->xAxis->pixelToCoord(x_pos);
float y = m_customPlot->graph(0)->data()->at(x_val)->value;
QString strToolTip = QString("%1,%2").arg(x_val).arg(y);
QToolTip::showText(cursor().pos(), strToolTip, m_customPlot);
}
}三、完整源码
OscilloscopeFrame.h
#ifndef OSCILLOSCOPEFRAME_H
#define OSCILLOSCOPEFRAME_H
#include <QFrame>
#include "oscilloscopelib_global.h"
namespace Ui
{
class OscilloscopeFrame;
}
class QCustomPlot;
class AbstractRobot;
class OSCILLOSCOPELIBSHARED_EXPORT OscilloscopeFrame : public QFrame
{
Q_OBJECT
public:
explicit OscilloscopeFrame(QWidget *parent = 0);
~OscilloscopeFrame();
void setFixedLength(double length);
void addData(double key, double actVel, double prfVel);
void installController(AbstractRobot *controller);
private slots:
void plotMouseMoveEvent(QMouseEvent *event);
private:
Ui::OscilloscopeFrame *ui;
QCustomPlot *m_customPlot = nullptr;
QTimer *m_timer = nullptr;
double m_fixedLength;
AbstractRobot *m_controller = nullptr;
double m_actPos = 0;
double m_count = 0;
};
#endif // OSCILLOSCOPEFRAME_H
OscilloscopeFrame.cpp
#include "OscilloscopeFrame.h"
#include "qcustomplot.h"
#include "ui_OscilloscopeFrame.h"
#include <QtMath>
#include <QDebug>
#include <device/AbstractRobot.h>
#define OSCILLOSCOPE_UPDATE_MSEC 60
OscilloscopeFrame::OscilloscopeFrame(QWidget *parent) :
QFrame(parent),
ui(new Ui::OscilloscopeFrame)
{
ui->setupUi(this);
ui->spbStep->setValue(1);
for(int i = 1; i <= 8; ++i)
{
ui->cmbAxisId->addItem(QString::number(i));
}
m_customPlot = new QCustomPlot(this);
m_customPlot->setObjectName(QLatin1String("customPlot"));
ui->vlyPlot->addWidget(m_customPlot);
m_customPlot->setBackground(QBrush(QColor("#474848")));
m_customPlot->setInteractions(QCP::iRangeDrag | QCP::iRangeZoom |
QCP::iSelectPlottables); /* 可拖拽+可滚轮缩放 */
m_customPlot->legend->setVisible(true);
m_customPlot->addGraph();
m_customPlot->graph(0)->setPen(QPen(Qt::green, 3));
m_customPlot->graph(0)->setName(QStringLiteral("实际速度"));
m_customPlot->addGraph();
m_customPlot->graph(1)->setPen(QPen(Qt::yellow, 3));
m_customPlot->graph(1)->setName(QStringLiteral("规划速度"));
m_customPlot->axisRect()->setupFullAxesBox();
m_customPlot->yAxis->setRange(0, 3.3);
ui->btnPause2Continue->setCheckable(true);
setFixedLength(100);
/* 暂停/继续 */
connect(ui->btnPause2Continue, &QPushButton::clicked, this, [ = ]()
{
if(!m_timer)
{
return;
}
bool isCheckable = ui->btnPause2Continue->isCheckable();
if(isCheckable)
{
m_timer->stop();
ui->btnPause2Continue->setText(QStringLiteral("继续"));
}
else
{
m_timer->start(OSCILLOSCOPE_UPDATE_MSEC);
ui->btnPause2Continue->setText(QStringLiteral("暂停"));
}
ui->btnPause2Continue->setCheckable(!isCheckable);
});
/* 左移 */
connect(ui->btnLeftMove, &QPushButton::clicked, this, [ = ]()
{
m_customPlot->xAxis->setRange(m_customPlot->xAxis->range().lower - ui->spbStep->value(),
m_customPlot->xAxis->range().upper - ui->spbStep->value());
m_customPlot->replot();
});
/* 右移 */
connect(ui->btnRightMove, &QPushButton::clicked, this, [ = ]()
{
m_customPlot->xAxis->setRange(m_customPlot->xAxis->range().lower + ui->spbStep->value(),
m_customPlot->xAxis->range().upper + ui->spbStep->value());
m_customPlot->replot();
});
/* 显示表格 */
connect(ui->chkGrid, &QCheckBox::toggled, this, [ = ](bool checked)
{
m_customPlot->xAxis->grid()->setVisible(checked);
m_customPlot->yAxis->grid()->setVisible(checked);
m_customPlot->replot();
});
auto updateData = [ & ]()
{
if(m_controller)
{
int axis = ui->cmbAxisId->currentText().toInt();
T_AxisStatus status;
int ec = m_controller->readAxisStatus(axis, &status);
if(0 == ec)
{
ui->lblActVel->setText(QString::number(status.dEncVel));
ui->lblPrfVel->setText(QString::number(status.dPrfVel));
ui->lblActPos->setText(QString::number(status.dEncPos));
ui->lblPrfPos->setText(QString::number(status.dPrfPos));
if(m_actPos != status.dEncPos)
{
m_actPos = status.dEncPos;
addData(m_count, status.dEncVel, status.dPrfVel);
m_count ++;
}
}
else
{
ui->lblActVel->setText("error " + QString::number(ec));
ui->lblPrfVel->setText("error " + QString::number(ec));
ui->lblActPos->setText("error " + QString::number(ec));
ui->lblPrfPos->setText("error " + QString::number(ec));
}
}
};
m_timer = new QTimer();
connect(m_timer, &QTimer::timeout, updateData);
m_timer->start(OSCILLOSCOPE_UPDATE_MSEC);
connect(m_customPlot, SIGNAL(mouseMove(QMouseEvent *)), this,
SLOT(plotMouseMoveEvent(QMouseEvent *)));
for(int i = 0; i < 500; i++)
{
double x = qDegreesToRadians((double)i);
addData(i, sin(x), cos(x));
}
}
OscilloscopeFrame::~OscilloscopeFrame()
{
m_timer->stop();
delete m_timer;
m_timer = nullptr;
delete ui;
}
void OscilloscopeFrame::setFixedLength(double length)
{
/* 显示固定长度 */
m_fixedLength = length;
}
void OscilloscopeFrame::addData(double key, double actVel, double prfVel)
{
m_customPlot->graph(0)->addData(key, actVel);
m_customPlot->graph(1)->addData(key, prfVel);
m_customPlot->xAxis->rescale();
m_customPlot->graph(0)->rescaleValueAxis(false, true);
m_customPlot->graph(1)->rescaleValueAxis(false, true);
m_customPlot->xAxis->setRange(m_customPlot->xAxis->range().upper,
m_fixedLength, Qt::AlignRight);
m_customPlot->replot(QCustomPlot::rpQueuedReplot); /* 实现重绘 */
}
void OscilloscopeFrame::installController(AbstractRobot *controller)
{
m_controller = controller;
}
void OscilloscopeFrame::plotMouseMoveEvent(QMouseEvent *event)
{
if ( Qt::ControlModifier == event->modifiers())
{
int x_pos = event->pos().x();
int x_val = m_customPlot->xAxis->pixelToCoord(x_pos);
float y = m_customPlot->graph(0)->data()->at(x_val)->value;
QString strToolTip = QString("%1,%2").arg(x_val).arg(y);
QToolTip::showText(cursor().pos(), strToolTip, m_customPlot);
}
}