1. 功能说明
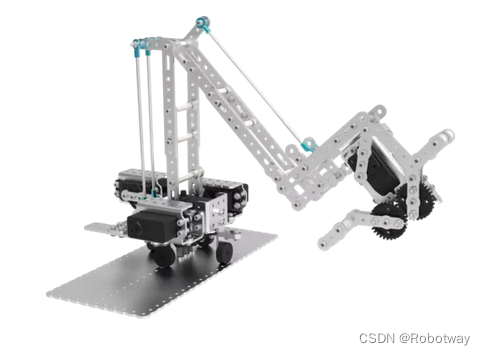
本文示例将实现R306样机5自由度并联机械臂搬运牛奶到指定地点的功能。该机械臂由1个5自由度并联机械臂和1个单轴丝杠平台构成,机械臂通过并联的方式同时控制同一个端点的运动。其驱动系统采用大扭矩舵机和小扭矩舵机、执行末端为夹持机构。
2. 并联机械臂机械系统
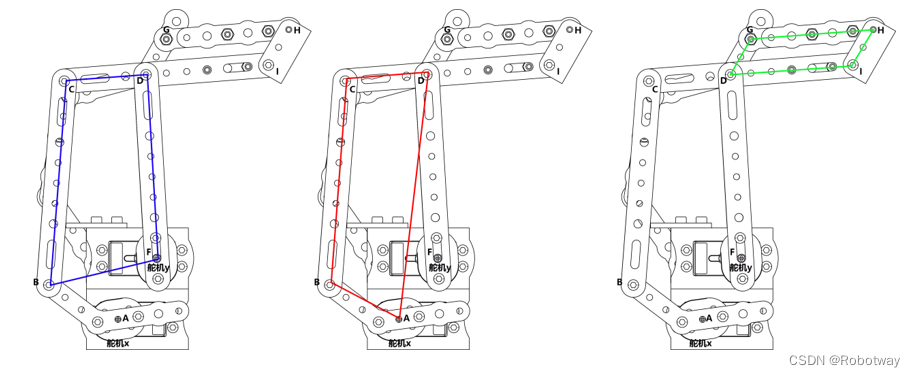
并联机械臂与串联机械臂每个独立的关节模块组成不同,并联机械臂是通过连杆组将多个驱动同时共同控制机械臂末端,如下图(四连杆并联机械臂)所示,可以分解为三个部分:

第一个部分是下图中蓝色的四连杆,舵机y作为驱动,舵机x固定不动,这时会形成一个FBCD四连杆结构,FB为机架,FD为驱动杆;
第二个部分是下图中红色的四连杆,舵机x作为驱动,舵机y固定不动,这时会形成一个ABCD四连杆,其中AD作为机架,AB作为驱动杆,BC作为传动杆,CD作为随动杆;
第三部分为DGHI平行四连杆,这个部分没有驱动,主要作用是保证执行端HI保持一个方向;
综上可知CD杆为第一部分四连杆和第二部分四连杆共同控制的杆件。
3. 并联机械臂运动学算法
当机械臂完成动作时,需通过舵机对L1和L2了两根连杆进行控制和调节,2个舵机的角度分别为θ1和θ2。为了方便分析,将机械臂简化进行分析。
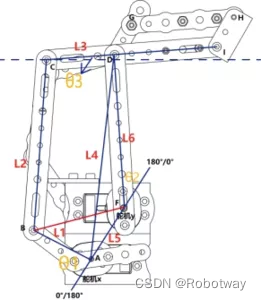
图中L1=AB,L2=BC,L3=CD,L4=DA,L5=AF,L6=DF,其中假设舵机x和舵机y的0°和180°的极限位置为AF杆方向,θ1和θ2分别为舵机x和舵机y的转动角度,其中L1、L2、L3、L5、L6都为已知尺寸(可用尺子量出)。
在这个模型中,并联机械臂的运动算法就是CD杆的运动轨迹,如果要求出CD杆的运动轨迹,实际是求出CD杆与DF杆的夹角∠CDF。
从图中可知:∠CDF=∠CDA+∠ADF;
∠CDA位于四连杆ABCD中,通过欧拉公式可以推导;∠ADF位于三角形ADF中,可以通过三角形余弦定理推导;
求解∠CDA,假设∠CAD=α:
根据欧拉公式展开得:
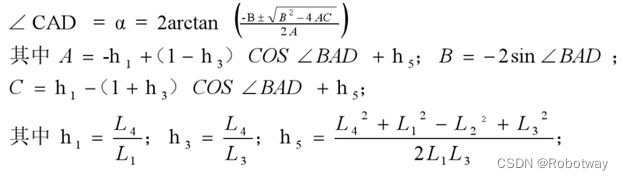
从上面的公式中可知我们还需要求出L4和∠BAD;
L4位于三角形ADF中,可通过三角函数求解得出。在三角形ADF中需要知道两条相邻边长和该相邻边的夹角,其中L6和L5为已知量,所以:

其中∠DFA=180°-θ2;
∠BAD=180°-θ1-∠DAF;

同理可得:

最终可解得:

计算机械臂的端点I的运动轨迹,可建立舵机x和舵机y转动中心连线为x轴的平面坐标系,如下图所示:
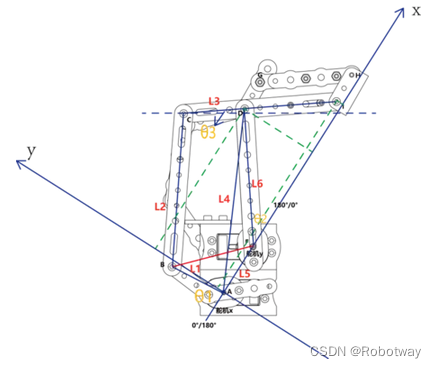
如上图所示,对D点和I点(x,y)作平面直角坐标系的投影,根据前面计算出的D点角度位置计算I点的运动坐标,最终可获得I(f(θ1,θ2),f(θ1,θ2))的关系。
4. 电子硬件
在这个示例中,采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 电池 | 7.4V锂电池 |
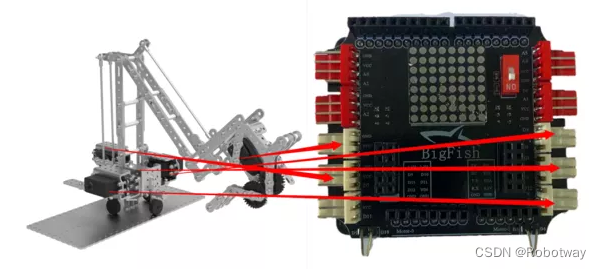
电路连接:舵机接线:由上至下分别连接在Bigfish扩展板的D4、D7、D3、D8、D12接口。
5. 功能实现
上位机:Controller 1.0
下位机编程环境:Arduino 1.8.19
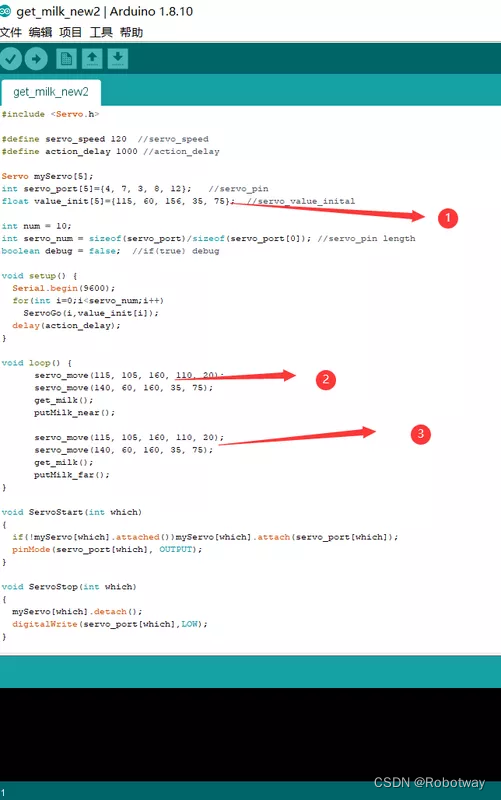
① 将参考例程(get_milk_new2.ino)下载到主控板:
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-04-07 https://www.robotway.com/
------------------------------*/
#include <Servo.h>
#define servo_speed 120 //servo_speed
#define action_delay 1000 //action_delay
Servo myServo[5];
int servo_port[5]={4, 7, 3, 8, 12}; //servo_pin
float value_init[5]={115, 60, 156, 35, 75}; //servo_value_inital
int num = 10;
int servo_num = sizeof(servo_port)/sizeof(servo_port[0]); //servo_pin length
boolean debug = false; //if(true) debug
void setup() {
Serial.begin(9600);
for(int i=0;i<servo_num;i++)
ServoGo(i,value_init[i]);
delay(action_delay);
}
void loop() {
servo_move(115, 105, 160, 110, 20);
servo_move(140, 60, 160, 35, 75);
get_milk();
putMilk_near();
servo_move(115, 105, 160, 110, 20);
servo_move(140, 60, 160, 35, 75);
get_milk();
putMilk_far();
}
void ServoStart(int which)
{
if(!myServo[which].attached())myServo[which].attach(servo_port[which]);
pinMode(servo_port[which], OUTPUT);
}
void ServoStop(int which)
{
myServo[which].detach();
digitalWrite(servo_port[which],LOW);
}
void ServoGo(int which , int where)
{
if(where!=200)
{
if(where==201) ServoStop(which);
else
{
ServoStart(which);
myServo[which].write(where);
}
}
ServoStart(which);
myServo[which].write(where);
}
void get_milk()
{
servo_move(115, 105, 160, 110, 20); //down
servo_move(160, 95, 160, 95, 40); //get
servo_move(160, 60, 160, 35, 75); //up
delay(action_delay);
servo_move(160, 60, 25, 35, 75); //turn
}
void putMilk_near()
{
//Serial.println("near");
servo_move(160, 60, 25, 60, 65); //down
servo_move(140, 60, 25, 60, 65); //put
servo_move(115, 60, 160, 35, 75);//reset
}
void putMilk_far()
{
//Serial.println("far");
servo_move(160, 100, 22, 56, 54); //down
servo_move(140, 103, 22, 56, 54); //put
servo_move(115, 60, 160, 35, 75); //reset
}
void servo_move(float value0, float value1, float value2, float value3, float value4)
{
//Serial.println("begin");
float value_arguments[] = {value0, value1, value2, value3, value4};
float value_delta[servo_num];
for(int i=0;i<servo_num;i++)
{
value_delta[i] = (value_arguments[i] - value_init[i]) / num;
}
for(int i=0;i<num;i++)
{
for(int k=0;k<servo_num;k++)
{
value_init[k] = value_delta[k] == 0 ? value_arguments[k] : value_init[k] + value_delta[k];
}
for(int j=0;j<servo_num;j++)
{
ServoGo(j,value_init[j]);
}
delay(servo_speed);
}
delay(action_delay);
}② 双击打开Controller 1.0.exe。将波特率与串口设置好,同时留下4、7、3、8、12几个舵机串口,调试舵机角度。具体操作步骤可参考【U002】如何驱动模拟舵机-Controller 1.0b软件的使用 。

③ 将调试好的舵机角度写到对应例程(get_milk_new2.ino)中的位置;这里以几个角度为例,大家可尝试自己更改角度使其动作看起来更流畅。
6. 资料内容
①搬运-例程源代码
②搬运-样机3D文件
③Controller1.0b资料包
资料内容详见:5自由度并联机械臂-搬运