大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激光SLAM,也方便想入门SLAM的同学和小白学习参考,相信看完会有一定的收获。如有不对的地方欢迎指出,欢迎各位大佬交流讨论,一起进步。
目录
一、std_msgs
1.1 简介
1.2 基本类别
1.3 使用模板
二、geometry_msgs
2.1 简介
2.2 基本类别
2.3 使用模板
三、sensor_msgs
3.1 简介
3.2 基本类别
3.3 使用模板
四、shape_msgs
4.1 简介
4.2 基本类别
4.3 使用模板
五、trajectory_msgs
5.1 简介
5.2 基本类型
5.3 基本类型
6.1 简介
6.2 基本类型
6.3 使用模板
七、visualization_msgs
7.1 简介
7.2 基本类型
7.3 marker使用模板
八、jsk_recognition _msgs
8.1 简介
8.2 类别
8.3 使用模板
ROS很重要一点就是可以对不同类型的消息进行接收与发送,并且能够对数据进行实时的可视化,ROS官网已经给出了很多的消息类型供我们使用。
一、std_msgs
1.1 简介
std_msgs是一种标准消息类型包,包含了一些常用的基本数据类型的消息定义。
1.2 基本类别
std_msgs/Bool:表示布尔值(True或False)
std_msgs/Int8、Int16、Int32、Int64:表示有符号的8、16、32和64位整数
std_msgs/UInt8、UInt16、UInt32、UInt64:表示无符号的8、16、32和64位整数
std_msgs/Float32、Float64:表示单精度和双精度浮点数
std_msgs/String:表示字符串
std_msgs还包括其他类型的消息,例如:
std_msgs/Time:表示ROS的时间戳
std_msgs/Duration:表示时间段
std_msgs/Header:表示ROS消息头,其中包括时间戳、坐标系和序列号等信息。
std_msgs - ROS Wiki
1.3 使用模板
发布接收字符串
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "std_msgs/Int32.h"
void callback_string(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("Received string: %s", msg->data.c_str());
// 创建一个新的std_msgs::String类型消息
std_msgs::String output_msg;
output_msg.data = "Received string: " + msg->data;
// 发布新消息
pub.publish(output_msg);
}
void callback_int(const std_msgs::Int32::ConstPtr& msg)
{
ROS_INFO("Received integer: %d", msg->data);
// 创建一个新的std_msgs::String类型消息
std_msgs::String output_msg;
output_msg.data = "Received integer: " + std::to_string(msg->data);
// 发布新消息
pub.publish(output_msg);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "listener_and_talker");
// 创建ROS节点句柄和两个订阅节点对象,以及一个发布者对象
ros::NodeHandle nh;
ros::Subscriber sub_string = nh.subscribe("my_topic_string", 10, callback_string);
ros::Subscriber sub_int = nh.subscribe("my_topic_int", 10, callback_int);
ros::Publisher pub = nh.advertise<std_msgs::String>("my_topic_output", 10);
// 运行ROS节点
ros::spin();
return 0;
}二、geometry_msgs
2.1 简介
ROS中的geometry_msgs是一个包含了各种几何形状相关的消息类型的软件包,主要用于机器人运动控制和感知相关应用中。
2.2 基本类别
- Point:用于表示三维空间中的一个点。
- Quaternion:用于表示四元数,通常用于表示机器人末端执行器的姿态。
- Pose:用于表示三维空间中的一个位姿,即位置和姿态。
- Vector3:用于表示三维空间中的一个向量。
- Twist:用于表示机器人在三维空间中的线速度和角速度。
- Transform:用于表示两个坐标系之间的变换关系,即一个坐标系相对于另一个坐标系的平移和旋转。
- PoseStamped:用于表示带有时间戳的三维空间中的位姿。
- TwistStamped:用于表示带有时间戳的机器人在三维空间中的线速度和角速度。
- TransformStamped:用于表示带有时间戳的两个坐标系之间的变换关系。
- Accel:用于表示机器人在三维空间中的线加速度和角加速度。
- AccelStamped:用于表示带有时间戳的机器人在三维空间中的线加速度和角加速度。
更多使用方法见官网https://wiki.ros.org/geometry_msgs?distro=melodic
2.3 使用模板
发布接收位置
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
void poseCallback(const geometry_msgs::PoseStamped::ConstPtr& msg)
{
// 在回调函数中处理接收到的消息
ROS_INFO("Received a pose at time %f", msg->header.stamp.toSec());
ROS_INFO("Position: x=%f, y=%f, z=%f", msg->pose.position.x, msg->pose.position.y, msg->pose.position.z);
ROS_INFO("Orientation: x=%f, y=%f, z=%f, w=%f", msg->pose.orientation.x, msg->pose.orientation.y, msg->pose.orientation.z, msg->pose.orientation.w);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "pose_node"); // 初始化ROS节点
ros::NodeHandle nh;
// 创建一个用于接收pose消息的订阅者
ros::Subscriber sub = nh.subscribe<geometry_msgs::PoseStamped>("pose_topic", 10, poseCallback);
// 创建一个用于发送pose消息的发布者
ros::Publisher pub = nh.advertise<geometry_msgs::PoseStamped>("pose_topic", 10);
// 设置消息的头部信息
geometry_msgs::PoseStamped pose_msg;
pose_msg.header.stamp = ros::Time::now();
pose_msg.header.frame_id = "map";
// 设置消息的内容
pose_msg.pose.position.x = 1.0;
pose_msg.pose.position.y = 2.0;
pose_msg.pose.position.z = 3.0;
pose_msg.pose.orientation.x = 0.0;
pose_msg.pose.orientation.y = 0.0;
pose_msg.pose.orientation.z = 0.0;
pose_msg.pose.orientation.w = 1.0;
// 发布消息
pub.publish(pose_msg);
ros::spin();
return 0;
}
三、sensor_msgs
3.1 简介
ROS中的sensor_msgs是一种消息类型,用于在ROS节点之间传输与传感器数据相关的消息。sensor_msgs包含了许多常用传感器的消息类型,例如激光雷达、相机、IMU、GPS等。
3.2 基本类别
- Imu:姿态、角速度和线性加速度等信息。
- MagneticField:磁场强度数据。
- NavSatFix:GPS定位数据。
- NavSatStatus:GPS定位状态数据。
- Joy:手柄控制器数据。
- JoyFeedback:手柄反馈数据。
- JoyFeedbackArray:手柄反馈数组数据。
- LaserScan:激光雷达数据。
- PointCloud:点云数据。
- PointCloud2:点云数据,支持RGB信息。
- CameraInfo:相机内参数据。
- Image:图像数据。
- CompressedImage:压缩图像数据。
- FluidPressure:液压数据。
- TFMessage:坐标系变换数据。
- NavSatFix:GPS数据。
- TimeReference:时间参考数据。
- MultiArrayDimension:多维数组数据的维度信息。
- MultiArrayLayout:多维数组数据的布局信息。
- ImageProjection:用于三维重建的图像投影数据。
- PointField:点云数据的字段信息。
- RegionOfInterest:感兴趣区域数据。
- RelativePose:相对位姿数据。
- RelativePoseStamped:相对位姿和时间戳数据。
- NavSatCartesian:GPS坐标转换为笛卡尔坐标数据。
- CompressedNavSatFix:压缩GPS数据。
sensor_msgs - ROS Wiki
3.3 使用模板
发布接收点云
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
void pointCloudCallback(const sensor_msgs::PointCloud2ConstPtr& input_cloud_msg)
{
// TODO: 这里添加处理输入点云的代码
// 将处理后的点云发布到 /output_pointcloud 话题上
pub.publish(output_cloud_msg);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "point_cloud_node");
ros::NodeHandle nh;
// 订阅 /input_pointcloud 话题上的点云消息
ros::Subscriber sub = nh.subscribe<sensor_msgs::PointCloud2>("/input_pointcloud", 1, pointCloudCallback);
// 发布处理后的点云消息到 /output_pointcloud 话题上
ros::Publisher pub = nh.advertise<sensor_msgs::PointCloud2>("/output_pointcloud", 1);
ros::spin();
return 0;
}四、shape_msgs
4.1 简介
ROS中的shape_msgs是一个定义了常见几何形状(例如点,线,多边形,立方体等)的ROS消息类型。它是ROS的标准消息之一,常用于描述机器人的形状和姿态,以及环境中的障碍物等。shape_msgs消息并不能直接在rviz中可视化,需要将其转换为visualization_msgs/Marker消息才能在rviz中显示。而visualization_msgs/Marker消息则可以直接在rviz中可视化,并且提供了多种不同的可视化方式,例如用线、面、箭头等方式显示几何形状。
4.2 基本类别
- Point: 一个三维空间中的点,由x、y和z三个浮点数表示。
- Quaternion: 一个四元数,由x、y、z和w四个浮点数表示。
- Vector3: 一个三维向量,由x、y和z三个浮点数表示。
- Pose: 一个位姿,由位置(Point)和方向(Quaternion)组成。
- PoseStamped: 带有时间戳的位姿。
- Twist: 一个刚体的线速度和角速度,由线速度(Vector3)和角速度(Vector3)组成。
- Polygon: 一个平面内的多边形,由多个点(Point)组成。
- Mesh: 一个三维模型,由多个三角形(Triangle)组成。
- SolidPrimitive: 一个固体的基本几何形状,例如立方体、球体、圆柱体等。
- MeshTriangle: 一个三角形,由三个顶点的索引组成,用于描述Mesh消息中的三角形。
4.3 使用模板
发送三角形顶点坐标
#include <ros/ros.h>
#include <shape_msgs/Polygon.h>
#include <geometry_msgs/Point32.h>
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "polygon_publisher");
// 创建节点句柄
ros::NodeHandle nh;
// 创建一个publisher发布名为"/polygon"的shape_msgs/Polygon消息
ros::Publisher polygon_pub = nh.advertise<shape_msgs::Polygon>("/polygon", 10);
// 设置消息发布频率
ros::Rate loop_rate(10);
while (ros::ok())
{
// 创建shape_msgs/Polygon消息并填充数据
shape_msgs::Polygon polygon;
geometry_msgs::Point32 p1, p2, p3;
p1.x = 0.0;
p1.y = 0.0;
p1.z = 0.0;
p2.x = 1.0;
p2.y = 0.0;
p2.z = 0.0;
p3.x = 0.0;
p3.y = 1.0;
p3.z = 0.0;
polygon.points.push_back(p1);
polygon.points.push_back(p2);
polygon.points.push_back(p3);
// 发布消息
polygon_pub.publish(polygon);
// 按照指定频率循环发布消息
loop_rate.sleep();
}
return 0;
}接收三角形顶点坐标
#include <ros/ros.h>
#include <shape_msgs/Polygon.h>
#include <geometry_msgs/Point32.h>
void polygonCallback(const shape_msgs::Polygon::ConstPtr& msg)
{
// 输出消息内容
ROS_INFO("Received polygon message:");
for (int i = 0; i < msg->points.size(); i++)
{
ROS_INFO("Point %d: (%f, %f, %f)", i+1, msg->points[i].x, msg->points[i].y, msg->points[i].z);
}
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "polygon_subscriber");
// 创建节点句柄
ros::NodeHandle nh;
// 创建一个subscriber订阅名为"/polygon"的shape_msgs/Polygon消息
ros::Subscriber polygon_sub = nh.subscribe("/polygon", 10, polygonCallback);
// 循环处理回调函数
ros::spin();
return 0;
}五、trajectory_msgs
5.1 简介
trajectory_msgs 是一个ROS消息包,包含用于描述机器人或其它物体运动的消息类型。其主要包含以下消息类型:
5.2 基本类型
- JointTrajectory: 描述机器人关节运动轨迹,包含关节位置、速度、加速度、时间戳等信息。
- JointTrajectoryPoint: 描述一个时刻的机器人关节状态,包含关节位置、速度、加速度等信息。
- MultiDOFJointTrajectory: 描述机器人多自由度运动轨迹,包含多个关节的位置、速度、加速度、时间戳等信息。
- MultiDOFJointTrajectoryPoint: 描述一个时刻的机器人多自由度状态,包含多个关节的位置、速度、加速度等信息。
5.3 基本类型
发布者周期性地创建一个 JointTrajectory 消息并发布到话题 joint_trajectory 上,而订阅者则通过回调函数 jointTrajectoryCallback 接收到这些消息并打印出其中的关节信息。
#include <ros/ros.h>
#include <trajectory_msgs/JointTrajectory.h>
#include <trajectory_msgs/JointTrajectoryPoint.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "joint_trajectory_publisher_subscriber");
ros::NodeHandle nh;
// 创建一个发布者,用于发布机器人的关节轨迹
ros::Publisher joint_trajectory_pub = nh.advertise<trajectory_msgs::JointTrajectory>("joint_trajectory", 10);
// 创建一个订阅者,用于接收机器人的关节轨迹
ros::Subscriber joint_trajectory_sub = nh.subscribe("joint_trajectory", 10, jointTrajectoryCallback);
ros::Rate loop_rate(10); // 发布频率为10Hz
while (ros::ok())
{
// 创建一个JointTrajectory消息
trajectory_msgs::JointTrajectory trajectory_msg;
trajectory_msg.header.stamp = ros::Time::now();
trajectory_msg.joint_names.push_back("joint_1");
trajectory_msg.joint_names.push_back("joint_2");
trajectory_msg.joint_names.push_back("joint_3");
// 创建一个JointTrajectoryPoint消息
trajectory_msgs::JointTrajectoryPoint point_msg;
point_msg.positions.push_back(0.5);
point_msg.positions.push_back(0.5);
point_msg.positions.push_back(0.5);
point_msg.velocities.push_back(0.0);
point_msg.velocities.push_back(0.0);
point_msg.velocities.push_back(0.0);
point_msg.time_from_start = ros::Duration(1.0); // 在1秒的时间内到达目标位置
trajectory_msg.points.push_back(point_msg); // 将JointTrajectoryPoint添加到JointTrajectory中
// 发布JointTrajectory消息
joint_trajectory_pub.publish(trajectory_msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
// 订阅者回调函数,用于接收机器人的关节轨迹
void jointTrajectoryCallback(const trajectory_msgs::JointTrajectory& msg)
{
ROS_INFO("Received JointTrajectory message");
// 打印出轨迹中的关节信息
for (int i = 0; i < msg.joint_names.size(); i++)
{
ROS_INFO("%s position: %f, velocity: %f, acceleration: %f",
msg.joint_names[i].c_str(),
msg.points[0].positions[i],
msg.points[0].velocities[i],
msg.points[0].accelerations[i]);
}
}六、nav_msgs
6.1 简介
ROS中的nav_msgs是一组与导航相关的消息(messages)和服务(services)类型的软件包。它包含了一些用于导航任务的标准消息格式,比如机器人当前的位姿信息、目标点、障碍物等信息。
6.2 基本类型
- Odometry(里程计消息):提供机器人当前的位姿、速度等信息。
- Path(路径消息):提供机器人的路径信息,可以用于可视化机器人在地图上的运动轨迹。
- MapMetaData(地图元数据消息):提供地图的基本信息,如分辨率、地图的起始点和终点等。
- OccupancyGrid(占据栅格地图消息):提供机器人周围的环境地图信息,包括障碍物和自由空间。
- GetMap(获取地图服务):用于从地图服务器中获取占据栅格地图。
6.3 使用模板
发布接收一个Path,Path可以直接在RVIZ可视化
#include <ros/ros.h>
#include <nav_msgs/Path.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "path_publisher");
ros::NodeHandle nh;
// 创建一个发布者,发布类型为nav_msgs::Path,话题名为/path
ros::Publisher path_pub = nh.advertise<nav_msgs::Path>("path", 10);
// 创建一个订阅者,订阅类型为nav_msgs::Path,话题名为/path
ros::Subscriber path_sub = nh.subscribe<nav_msgs::Path>("path", 10, pathCallback);
// 循环发布消息
ros::Rate loop_rate(10);
while (ros::ok())
{
// 创建一个新的Path消息
nav_msgs::Path path_msg;
// 将路径信息添加到Path消息中,此处省略具体代码
...
// 发布Path消息
path_pub.publish(path_msg);
// 循环等待
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
// 接收到Path消息时的回调函数
void pathCallback(const nav_msgs::Path::ConstPtr& path_msg)
{
// 处理接收到的Path消息,此处省略具体代码
...
}七、visualization_msgs
7.1 简介
visualization_msgs是ROS中的一个用于可视化的消息类型软件包。它包含了一些用于在ROS中进行可视化的标准消息格式,如点、线、箭头、网格、文字、标记等。
7.2 基本类型
- Marker(标记消息):用于将点、线、箭头、网格、文字等可视化为三维空间中的对象。
- MarkerArray(标记数组消息):用于同时发布多个Marker消息。
- ImageMarker(图像标记消息):用于将图像可视化为三维空间中的对象。
- InteractiveMarker(交互式标记消息):用于添加可以与用户交互的可视化元素,如移动、旋转、缩放等。
https://wiki.ros.org/visualization_msgs?distro=melodic
7.3 marker使用模板
*发布接收
发布Marker消息
ros::Publisher vis_pub = nh.advertise<visualization_msgs::Marker>( "visualization_marker", 0, markerCallback);
接收Marker消息
ros::Subscriber sub = nh.subscribe<visualization_msgs::Marker>("marker_topic", 10, markerCallback);
*消息内容
//基本信息
visualization_msgs::Marker marker;
marker.header.frame_id = "base_link";
marker.header.stamp = ros::Time();
marker.ns = "my_namespace";
marker.id = 0;
marker.type = visualization_msgs::Marker::SPHERE;//确定类型
marker.action = visualization_msgs::Marker::ADD;
//位置信息
marker.pose.position.x = 1;
marker.pose.position.y = 1;
marker.pose.position.z = 1;
marker.pose.orientation.x = 0.0;
marker.pose.orientation.y = 0.0;
marker.pose.orientation.z = 0.0;
marker.pose.orientation.w = 1.0;
//Marker范围
marker.scale.x = 1;
marker.scale.y = 0.1;
marker.scale.z = 0.1;
//Marker颜色
marker.color.a = 1.0; // Don't forget to set the alpha!
marker.color.r = 0.0;
marker.color.g = 1.0;
marker.color.b = 0.0;
//加载地图
marker.mesh_resource="package://pr2_description/meshes/base_v0/base.dae";
//发布消息
vis_pub.publish( marker );
建立一个箭头
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main( int argc, char** argv )
{
ros::init(argc, argv, "basic_shapes");
ros::NodeHandle n;
ros::Rate r(1);
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 1);
while (ros::ok())
{
visualization_msgs::Marker marker;
marker.header.frame_id = "base_link";
marker.header.stamp = ros::Time::now();
marker.ns = "basic_shapes";
marker.id = 0;
marker.type = visualization_msgs::Marker::ARROW;
marker.action = visualization_msgs::Marker::ADD;
marker.scale.x = 1.0;
marker.scale.y = 0.1;
marker.scale.z = 0.1;
marker.color.r = 1.0f;
marker.color.g = 0.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0;
marker.pose.position.x = 0;
marker.pose.position.y = 0;
marker.pose.position.z = 0;
marker.pose.orientation.x = 0.0;
marker.pose.orientation.y = 0.0;
marker.pose.orientation.z = 0.0;
marker.pose.orientation.w = 1.0;
marker_pub.publish(marker);
r.sleep();
}
}
建立一个cube list
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main( int argc, char** argv )
{
ros::init(argc, argv, "basic_shapes");
ros::NodeHandle n;
ros::Rate r(1);
ros::Publisher marker_pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 1);
visualization_msgs::Marker marker;
marker.header.frame_id = "base_link";
marker.header.stamp = ros::Time::now();
marker.ns = "basic_shapes";
marker.type = visualization_msgs::Marker::CUBE_LIST;
marker.action = visualization_msgs::Marker::ADD;
marker.scale.x = 0.1;
marker.scale.y = 0.1;
marker.scale.z = 0.1;
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0;
for (int i = 0; i < 10; i++)
{
for (int j = 0; j < 10; j++)
{
for (int k = 0; k < 10; k++)
{
geometry_msgs::Point cube_point;
cube_point.x = i * 0.1;
cube_point.y = j * 0.1;
cube_point.z = k * 0.1;
marker.points.push_back(cube_point);
}
}
}
while (ros::ok())
{
marker_pub.publish(marker);
r.sleep();
}
}
八、jsk_recognition _msgs
8.1 简介
jsk_recognition_msgs 是一个ROS消息包,它包含了一些用于机器人视觉和感知的常用消息类型。这些消息类型可以被用于在ROS系统中传递机器人感知和识别结果。

8.2 类别
主要包含以下消息类型:
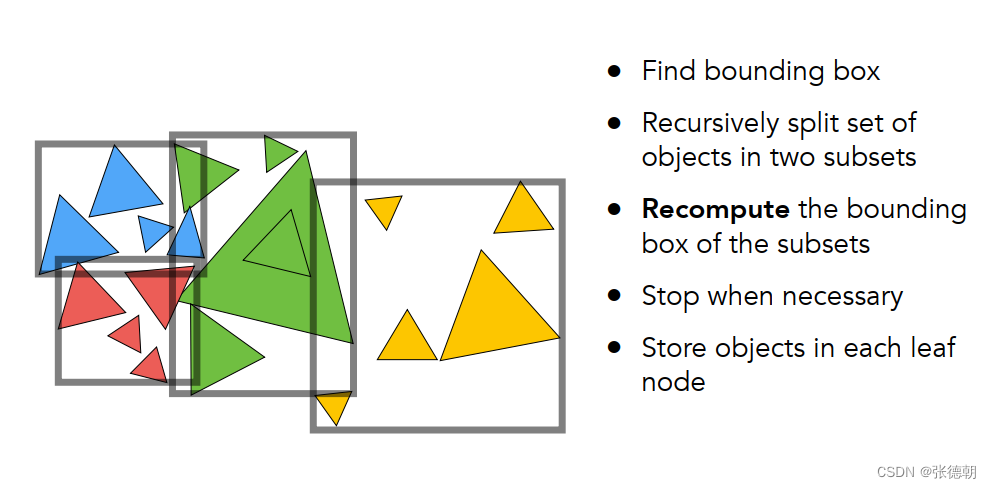
- BoundingBox:用于表示物体的3D包围盒,包括其尺寸和位置等信息。
- BoundingBoxArray:一个由多个 BoundingBox 组成的数组,用于表示多个物体的包围盒。
- ClusterPointIndices:用于表示点云中的聚类信息,包括每个聚类的点的索引。
- ContactSensor:用于表示机器人接触传感器的测量值,例如触摸传感器和力传感器。
- Histogram:用于表示图像或点云的直方图信息。
- LabelArray:一个由多个标签组成的数组,用于表示图像或点云中每个像素或点的标签。
- ModelCoefficientsArray:一个由多个模型系数组成的数组,用于表示多个几何模型的系数。
- PolygonArray:一个由多个多边形组成的数组,用于表示多个物体的表面几何信息。
- RectArray:一个由多个矩形组成的数组,用于表示多个图像区域的位置和大小等信息。
- Segment:用于表示点云中的一个分割结果,包括每个点所属的分割标签和系数等信息。
- Segmentation:一个由多个 Segment 组成的数组,用于表示点云中的多个分割结果。
- TrackingObject:用于表示追踪物体的信息,包括其标识符、位置和速度等信息。
- jsk_recognition_msgs 包提供了一些方便的消息类型,可用于处理机器人感知和识别的数据。
8.3 使用模板
自定义发送
#include <ros/ros.h>
#include <jsk_recognition_msgs/BoundingBoxArray.h>
#include <jsk_recognition_msgs/BoundingBox.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "custom_bounding_box_array_publisher");
ros::NodeHandle nh;
// 创建一个 BoundingBoxArray 发布者
ros::Publisher bb_array_pub = nh.advertise<jsk_recognition_msgs::BoundingBoxArray>("bounding_box_array_topic", 10);
// 创建一个 BoundingBoxArray 消息
jsk_recognition_msgs::BoundingBoxArray bb_array_msg;
// 设置 BoundingBoxArray 消息的 Header
bb_array_msg.header.frame_id = "base_link";
bb_array_msg.header.stamp = ros::Time::now();
// 创建一个 BoundingBox 消息并添加到 BoundingBoxArray 消息中
jsk_recognition_msgs::BoundingBox bb_msg;
bb_msg.header = bb_array_msg.header;
bb_msg.label = "object_1"; // 设置标签
bb_msg.pose.position.x = 1.0; // 设置位置坐标
bb_msg.pose.position.y = 2.0;
bb_msg.pose.position.z = 3.0;
bb_msg.dimensions.x = 0.5; // 设置尺寸
bb_msg.dimensions.y = 0.3;
bb_msg.dimensions.z = 0.2;
bb_array_msg.boxes.push_back(bb_msg); // 将 BoundingBox 消息添加到 BoundingBoxArray 中
// 发布 BoundingBoxArray 消息
bb_array_pub.publish(bb_array_msg);
ROS_INFO("Custom BoundingBoxArray published");
ros::spin();
return 0;
}
接收获取坐标
#include <ros/ros.h>
#include <jsk_recognition_msgs/BoundingBoxArray.h>
void boundingBoxCallback(const jsk_recognition_msgs::BoundingBoxArray::ConstPtr& msg) {
// 遍历BoundingBoxArray中的所有BoundingBox
for (const auto& bbox : msg->boxes) {
// 获取BoundingBox的尺寸
const auto& dimensions = bbox.dimensions;
float width = dimensions.x;
float height = dimensions.y;
float depth = dimensions.z;
// 获取BoundingBox的坐标
const auto& position = bbox.pose.position;
float x = position.x;
float y = position.y;
float z = position.z;
// 在控制台输出BoundingBox的尺寸和坐标
ROS_INFO_STREAM("Bounding Box Dimensions (width, height, depth): " << width << ", " << height << ", " << depth);
ROS_INFO_STREAM("Bounding Box Position (x, y, z): " << x << ", " << y << ", " << z);
}
}
int main(int argc, char** argv) {
// 初始化ROS节点
ros::init(argc, argv, "bounding_box_subscriber");
// 创建节点句柄
ros::NodeHandle nh;
// 订阅jsk_recognition_msgs::BoundingBoxArray消息
ros::Subscriber sub = nh.subscribe<jsk_recognition_msgs::BoundingBoxArray>("bounding_box_topic", 1000, boundingBoxCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
在上面的代码中,我们定义了一个回调函数 boundingBoxCallback() 来处理接收到的 jsk_recognition_msgs::BoundingBoxArray 消息。在这个回调函数中,我们遍历 BoundingBoxArray 中的所有 BoundingBox,并从每个 BoundingBox 中获取其尺寸和坐标信息。具体来说,我们使用 bbox.dimensions 来获取 BoundingBox 的尺寸,使用 bbox.pose.position 来获取 BoundingBox 的位置。最后,我们在控制台上输出每个 BoundingBox 的尺寸和坐标信息,以便我们可以在程序运行时检查它们。
到此,专栏的ROS讲解部分结束,你应该知道ROS能干啥和编写简单的发送接收消息的代码了,下一步我们将介绍SLAM的理论基础。

![[LeetCode周赛复盘] 第 342 场周赛20230423](https://img-blog.csdnimg.cn/002404b0dfca4a4e855cbfd4c3d9f6dc.png)



![[HBZ分享] 小米手机如何解BL锁](https://img-blog.csdnimg.cn/7974185433104db192cc9f4f871078fb.png)
