1 AVL平衡二叉树的概念
平衡二叉树在BST树基础上加了平衡操作。
BST树特点 :在BST树的基础上,引入了节点“平衡”的概念,任意一个节点的左右子树高度差不超过 1 ,为了维持节点的平衡,引入了四种旋转操作,如下:
1.左孩子左子树太高,做右旋转操作
2.右孩子的右子树太高,做左旋转操作
3.左孩子的右子树太高,做左-右旋转操作(也叫左平衡操作)
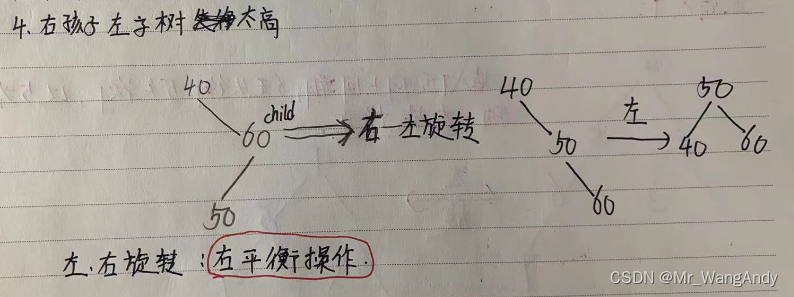
4.右孩子的左子树太高,做右-左旋转操作(也叫右平衡操作)
AVL树:记忆的时候,与BST树的插入删除联系起来。
下面分别记录AVL的四种失衡操作,并举例说明。
2 AVL的四种旋转操作
2.1 右旋转
右旋转调整。如下图所示,40左子树高度为2,右子树高度为0 ,这种情况称为左失衡,需要进行右旋转。
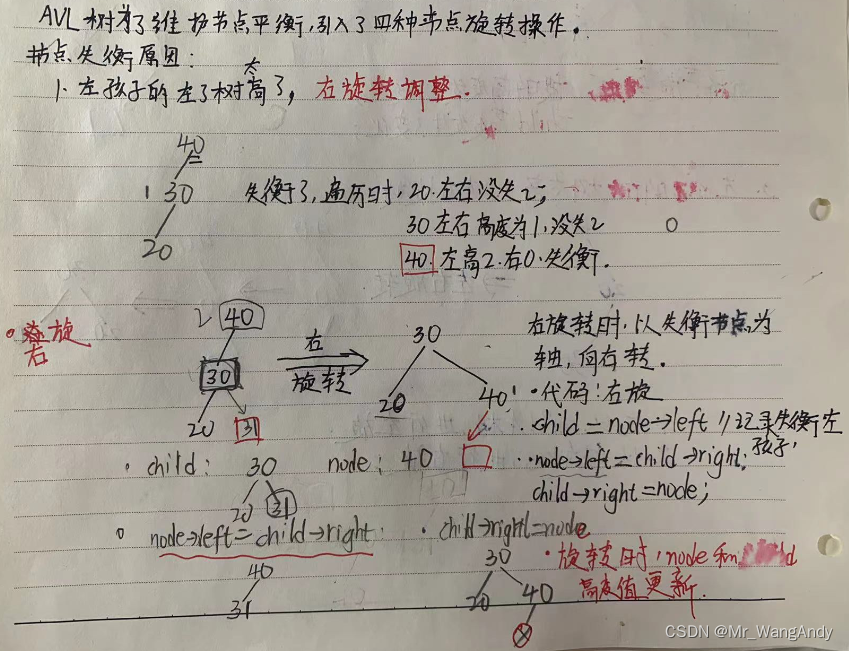
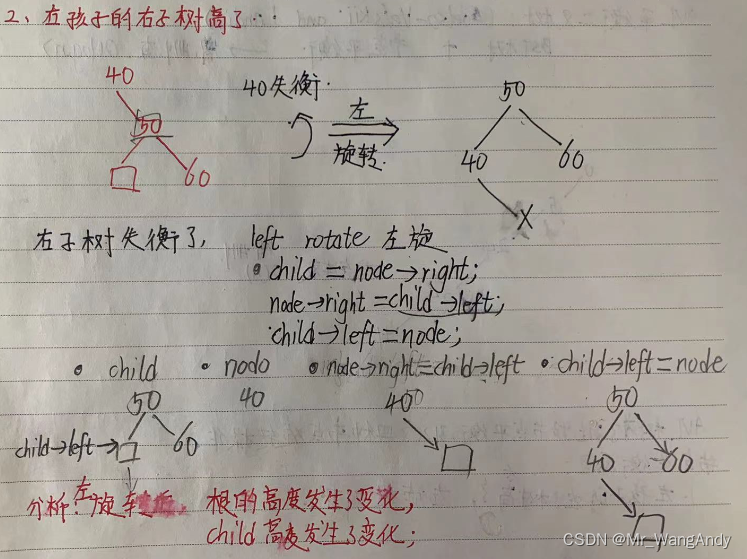
2.2 左旋转
左旋转调整。当节点的右子树高度大于节点的左孩子高度时候,如下图情况,需要做左旋转调整。
调整方法:先记录当前节点的右孩子。然后,当前节点的右孩子指向当前节点孩子的左孩子;然后孩子节点的左孩子指向当前节点。
2.3 左右旋转
左右旋转,也叫左平衡调整。这种情况需要调整两次,先进行一次左旋转,再进行一次右旋转。如下图所示。

2.4 右左旋转
右左旋转,也称为有平衡操作。这种情况也需要调整两次,即先进行一次右旋转,再进行一次左旋转。
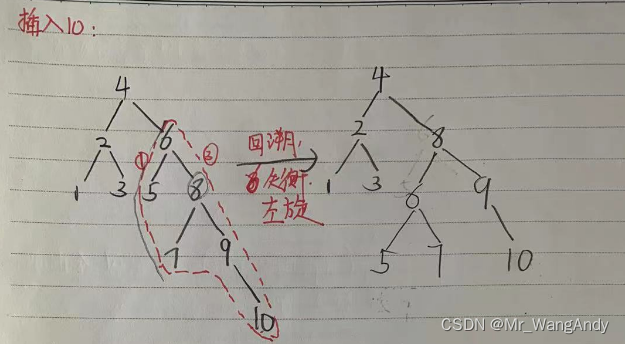
3 AVL的插入,旋转调整举例
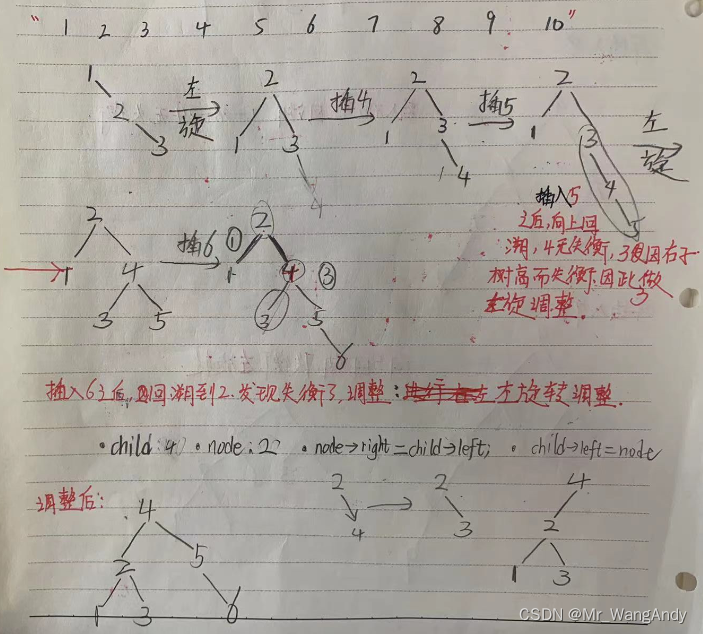
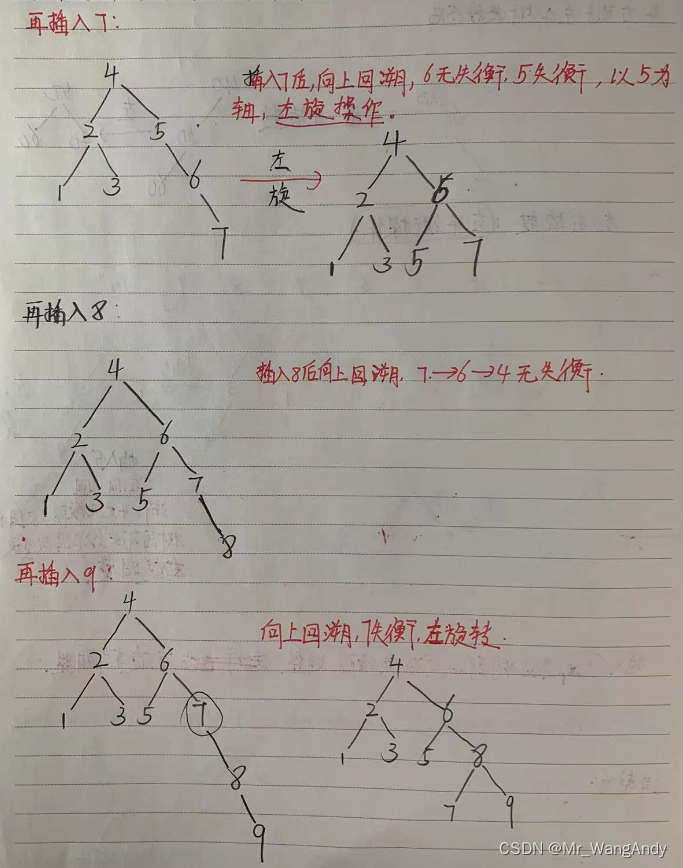
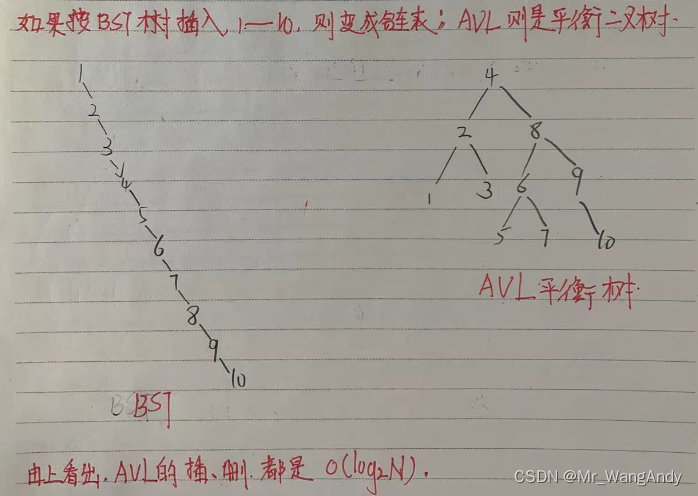
4. BST树 和 AVL树插入1-10后,对比
BST树插入1-10后,BST树变成了一个链表;AVL树则是一颗平衡二叉树。
5. AVL四种旋转操作,插入,删除代码实现
#include <iostream>
#include <functional>
using namespace std;
// 定义AVL节点类型
template <typename T>
class AVLTree
{
public:
AVLTree() : root_(nullptr) { }
// 插入操作
void insert(const T &val)
{
root_ = insert(root_, val);
}
// 删除操作
void remove(const T & val)
{
root_ = remove(root_, val);
}
private:
// 定义AVL树节点类型
struct Node
{
Node(T data = T())
:data_(data)
, left_(nullptr)
, right_(nullptr)
, height_(1)
{}
T data_;
Node *left_;
Node *right_;
int height_;
};
Node *root_;
//
int max(int a, int b)
{
return a > b ? a : b;
}
/*
* 功能:返回node高度
*/
int height(Node *node)
{
return node == nullptr ? 0 : node->height_;
}
/*
* 功能:node节点进行右旋转,并返回旋转后的根节点
*
* 参数:
* node : 当前节点
*
* 返回值:
* 返回旋转后的根节点
*/
Node *rightRotate(Node *node)
{
Node *child = node->left_;
node->left_ = child->right_;
child->right_ = node;
// 旋转后根节点和child节点发生了变化,所以要更新高度值。
node->height_ = max(height(node->left_), height(node->right_)) + 1;
node->height_ = max(height(child->left_), height(child->right_)) + 1;
// 返回旋转后的根节点
return child;
}
/* 功能:左旋转,并返回旋转后的根节点
*
* 参数:
* node : 根节点
*
* 返回值:
* 返回旋转后的根节点
*/
Node *leftRotate(Node *node)
{
Node *child = node->right_;
node->right_ = child->left_;
child->left_ = node;
// 更新旋转后的高度值
node->height_ = max(height(node->left_), height(node->right_)) + 1;
child->height_ = max(height(child->left_), height(child->right_)) + 1;
// 返回旋转后的根节点
return child;
}
/*
* 功能:左右旋转,并把根节点返回
*
* 参数:
* node : 以参数node为旋转轴
*/
Node * leftBalance(Node *node)
{
node->left_ = leftRotate(node->left_); // 先对根节点左孩子进行左旋转
return rightRotate(node); // 再对,根节点右孩子进行右旋转。
}
/*
* 功能:右左旋转,并把根节点返回
*
* 参数:
* node : 以参数node为旋转轴
*/
Node * rightBalance(Node *node)
{
node->right_ = rightRotate(node->right_); // 以左孩子为根进行左旋
return leftRotate(node);
}
/*
* 功能:node中插入节点,并返回新插入节点
*
*/
Node * insert(Node *node, const T & val)
{
if (node == nullptr)
{
return new Node(val);
}
if (node->data_ > val) // 向当前节点的左子树中插入新节点,所以要判断,当前节点的左子树是否太高
{
node->left_ = insert(node->left_, val); // 新插入的节点都在叶子节点上,所以下面回溯时,调整树的平衡状态。
// 在回溯时候,判断节点是否失衡,如果node的左子树太高导致Node失衡了,
// 当前在向左子树中插入节点,新节点在左子树的叶子中,只可能导致左子树失衡,不存在右子树失衡的情况,所以直接用左子树高度 减去 右子树高度。
if (height(node->left_) - height(node->right_) > 1) // 如果当前节点的左子树比右子树高
{ // 分两种情况来判断,一个是左孩子的左子树节点失衡,一个树右孩右子树节点失衡。
if (height(node->left_->left_) >= height(node->left_->right_))
{
node = rightRotate(node); // 用旋转后的根节点 代替根节点
}
else
{
node = leftBalance(node);
}
}
}
else if (node->data_ < val)
{
node->right_ = insert(node->right_, val);
// 在递归回溯时候,判断节点是否失衡,Node的右子树太高,node 失衡了
if (height(node->right_) - height(node->left_) > 1)
{
if (height(node->right_->right_) >= height(node->right_->left_)) // 1-10,插入节点9时会出现这种情况
{
node = leftRotate(node);
}
else
{
node = rightBalance(node);
}
}
}
else // 如果新插入节点与当前节点相等,不插入,不用再递归,直接回溯
{
;
}
// 更新节点高度。因为递归中增加了新节点,所以回溯时候,更新节点的高度。
node->height_ = max(height(node->left_), height(node->right_)) + 1;
return node; // rrturn后,直接回溯,不再向下递归
}
/*
* 功能:删除val节点
*
* 参数:
* node: 当前处理的根节点
* val : 待删除的值
*/
Node * remove(Node *node,const T & val)
{
if (node == nullptr)
{
return nullptr;
}
if (node->data_ > val) // 如果当前节点大于val,则从当前节点左孩子中查找
{
node->left_ = remove(node->left_, val);
// 删除左子树的节点之后,可能造成右子树太高
if (height(node->right_) - height(node->left_) > 1)
{
// 右子树太高,分两种情况,第一:
if (height(node->right_->right_) >= height(node->right_->left_))
{
// 右孩子的右子树太高
node = leftRotate(node);
}
else
{
node = rightBalance(node);
}
}
}
else if (node->data_ < val)
{
node->right_ = remove(node->right_, val);
// 删除右节点后,可能造成左子树太高
if (height(node->left_) - height(node->right_) > 1)
{
// 如果左孩子的左子树失衡
if (height(node->left_->left_) >= height(node->left_->right_))
{
node = rightRotate(node);
}
else
{
node = leftBalance(node);
}
}
}
else // 删除节点,先删除两个孩子的节点,再删除一个孩子的节点
{
// 找到后,先处理两个孩子的节点,然后再删除一个孩子的节点。
if (node->left_ != nullptr && node->right_ != nullptr)
{
// 为了避免删除前驱和后继节点造成节点失衡,she高删除谁
if (height(node->left_) >= height(node->right_))
{
// 删除 前驱
Node *pre = node->left_;
while (pre->right_ != nullptr)
{
pre = pre->right_;
}
node->data_ = pre->data_; // 覆盖值
node->left_ = remove(node->left_, pre->data_); // 删除前驱节点
}
else
{
// 删除后继节点
Node *post = node->right_;
while (post->right_ != nullptr)
{
post = post->left_;
}
node->data_ = post->data_;
node->right_ = remove(node->right_, post->data_); // 删除后继节点
}
}
else // 最多有一个孩子节点
{
if (node->left_ != nullptr)
{
Node *left = node->left_;
delete node;
return left;
}
else if (node->right_ != nullptr)
{
Node *right = node->right_;
delete node;
return right;
}
else
{
return nullptr;
}
}
}
// 更新节点高度
node->height_ = max(height(node->left_), height(node->right_)) + 1;
return node;
}
};
int main()
{
AVLTree<int> avl;
for (int i = 1; i < 11; i++)
{
avl.insert(i);
}
avl.remove(6);
system("pause");
return 0;
}