Linux-0.11 kernel目录进程管理sched.c详解
sched.c主要功能是负责进程的调度,其最核心的函数就是schedule。除schedule以外, sleep_on和wake_up也是相对重要的函数。
schedule
void schedule(void)
schedule函数的基本功能可以分为两大块, 第一块是检查task中的报警信息和信号, 第二块则是进行任务的调度。
在第一块中,首先从任务数组的尾部任务开始,检查alarm是否小于当前系统滴答值,如果小于则代表alarm时间已经到期。将进程的signal中的SIGALARM位置1。
接着就看如果检查进程的信号中如果处理BLOCK位以外还有别的信号,并且如果任务处于可中断状态,则将任务置为就绪状态。
int i,next,c;
struct task_struct ** p;
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p) {
if ((*p)->alarm && (*p)->alarm < jiffies) { //如果设置了任务定时的值alarm, 并且已经过期
(*p)->signal |= (1<<(SIGALRM-1)); //将信号的SIGALARM位置为1
(*p)->alarm = 0;
}
if (((*p)->signal & ~(_BLOCKABLE & (*p)->blocked)) &&
(*p)->state==TASK_INTERRUPTIBLE)//如果信号位图中除了被阻塞的信号外还有其他信号, 并且任务处于可中断状态
(*p)->state=TASK_RUNNING; //修改任务的状态为就绪态
}
第二块的代码就是任务调度的核心代码。
这里会从任务数组的尾部任务开始进行遍历,从所有任务从选取counter值最大的任务作为下一个运行的任务去执行。
while (1) {
c = -1;
next = 0;
i = NR_TASKS;
p = &task[NR_TASKS];//从最后一个任务开始
while (--i) { //遍历所有的task, 取出其中counter最大的task
if (!*--p)
continue;
if ((*p)->state == TASK_RUNNING && (*p)->counter > c)//取出所有任务中counter值最大的任务作为下一个任务
c = (*p)->counter, next = i;
}
if (c) break;
//如果当前没有RUNNING状态的任务的counter可以大于-1,那么则去更新counter的值,counter = counter/2 + priority
for(p = &LAST_TASK ; p > &FIRST_TASK ; --p)
if (*p)
(*p)->counter = ((*p)->counter >> 1) +
(*p)->priority;//更新counter值 counter = counter/2 + priority
}
//切换任务执行next
switch_to(next);
show_task
void show_task(int nr,struct task_struct * p)
该函数的作用是显示任务序号为nr的进程的pid,进程状态以及内核栈剩余的大小。
int i,j = 4096-sizeof(struct task_struct);
printk("%d: pid=%d, state=%d, ",nr,p->pid,p->state);
i=0;
此时j指向PCB所在内存页的顶部, i指向task_struct结构体的下一个字节。下面这段代码的所用实际就是统计内核栈中空闲大小。
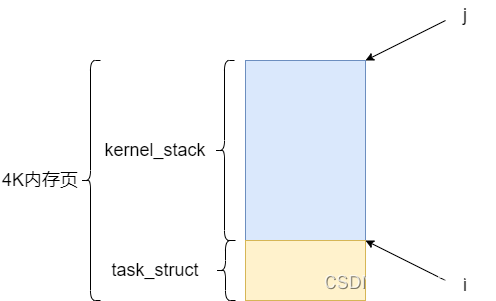
while (i<j && !((char *)(p+1))[i])
i++;
printk("%d (of %d) chars free in kernel stack\n\r",i,j);
show_stat
void show_stat(void)
该函数内部调用show_task函数,实际上就是遍历task数组, 调用show_stat函数显示进程相关信息。
int i;
for (i=0;i<NR_TASKS;i++)//遍历task数组
if (task[i])
show_task(i,task[i]);//调用show_task
math_state_restore
void math_state_restore()
该函数的作用是将当前协处理器内容保存到老协处理器状态数组中,并将当前任务的协处理器内容加载进协处理器。
sys_pause
int sys_pause(void)
该函数是pause的系统调用。该函数会将当前任务的状态修改为可中断的状态, 并调用schedule函数去进行进程的调度。
调用pause函数的进程会进入睡眠状态, 直到收到一个信号。
current->state = TASK_INTERRUPTIBLE;
schedule();
sleep_on
void sleep_on(struct task_struct **p)
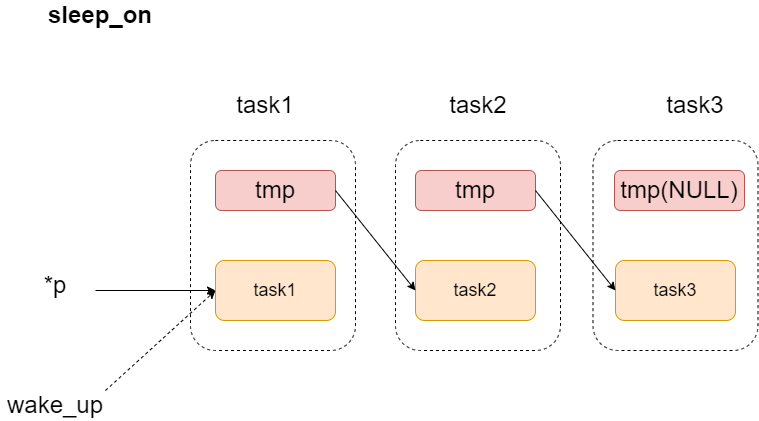
该函数的作用是将当前的task置为不可中断的等待状态, 直到被wake_up唤醒再继续执行。入参p是等待任务队列的头指针。通过p指针和tmp变量将等待的任务串在了一起。
该函数首先对一些异常情况进行了处理他, 例如p是空指针。或者当前task是任务0。
struct task_struct *tmp;
// 若指针无效,则退出。(指针所指的对象可以是NULL,但指针本身不会为0)。
if (!p)
return;
if (current == &(init_task.task)) // 如果当前任务是任务0,则死机(impossible!)。
panic ("task[0] trying to sleep");
接着让当前等待任务的头指针指向当前任务。并将当前任务修改为不可中断的等待状态。进行调用schedule函数让操作系统切换其他任务执行。
tmp = *p;
*p = current;
current->state = TASK_UNINTERRUPTIBLE;
schedule();
当程序从schedule()返回继续执行时,说明任务已经被显式的wake_up,如果此时还有其他进程仍然在等待,那么也一同唤醒。
因为任务都在等待同样的资源, 那么当资源可用的时候, 就可以唤醒所有等待的任务。
if (tmp) // 若还存在等待的任务,则也将其置为就绪状态(唤醒)。
tmp->state = 0;
interruptible_sleep_on
void interruptible_sleep_on (struct task_struct **p)
该函数与sleep_on类似,但是该函数会将任务的状态修改为可中断的等待状态, 而sleep_on则是将任务修改为不可中断的等待状态。因此通过interruptible_sleep_on而等待的task是可以被信号唤醒的。 而通过sleep_on而等待的task是不会被信号唤醒的,只能通过wake_up函数唤醒。
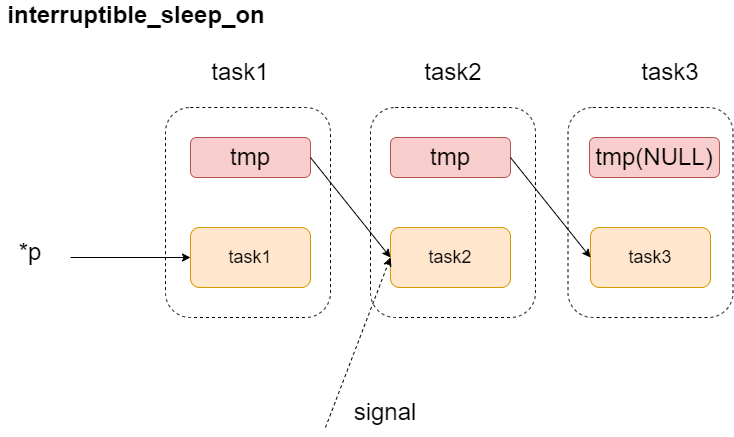
下面这段代码与sleep_on并无太大区别, 只是将进程的状态修改为可中断的等待状态。
struct task_struct *tmp;
if (!p)
return;
if (current == &(init_task.task))
panic ("task[0] trying to sleep");
tmp = *p;
*p = current;
repeat:
current->state = TASK_INTERRUPTIBLE;
schedule ();
由于任务是可以被信号唤醒的,因此下面需要判断唤醒的任务是否是等待任务队列的头节点。如果不是则需要等待其他任务。
if (*p && *p != current)
{
(**p).state = 0;
goto repeat;
}
下面一句代码有误,应该是*p = tmp,让队列头指针指向其余等待任务,否则在当前任务之前插入
等待队列的任务均被抹掉了
*p = NULL;
if (tmp)
tmp->state = 0;
wake_up
void wake_up(struct task_struct **p)
该函数的作用就是唤醒某一个任务。其用于唤醒p指向的等待队列中的任务。
if (p && *p)
{
(**p).state = 0; // 置为就绪(可运行)状态。
*p = NULL;
}
ticks_to_floppy_on
int ticks_to_floppy_on(unsigned int nr)
该函数指定软盘到正常运转状态所需延迟滴答数(时间)。
floppy_on
void floppy_on(unsigned int nr)
该函数等待指定软驱马达启动所需时间。
floppy_off
void floppy_off(unsigned int nr)
关闭相应的软驱马达停转定时器3s。
moff_timer[nr]=3*HZ;
do_floppy_timer
void do_floppy_timer(void)
如果马达启动定时到则唤醒进程。
if (mon_timer[i]) {
if (!--mon_timer[i])
wake_up(i+wait_motor);
如果马达停转定时到期则复位相应马达启动位,并更新数字输出到寄存器。
else if (!moff_timer[i]) {
current_DOR &= ~mask;
outb(current_DOR,FD_DOR);
add_timer
add_timer(long jiffies, void (*fn)(void))
```、
该函数的作用是设置定时值和相应的处理函数。
如果定时的值小于0, 那么立即调用处理函数。
```c
if (jiffies <= 0)
(fn)();
如果定时的值大于0, 那么首先取timer_list数组中寻找一个位置,将该位置上的滴答数设置为jiffies,将该位置上的fn设置为入参fn。并让next_timer指向它。
for (p = timer_list ; p < timer_list + TIME_REQUESTS ; p++)
if (!p->fn)
break;
if (p >= timer_list + TIME_REQUESTS)
panic("No more time requests free");
p->fn = fn;
p->jiffies = jiffies;
p->next = next_timer;
next_timer = p;
下面这段代码的作用是将刚刚插入链表中的timer移动的合适的位置。
由于next_timer这个链表上的jiffies是一个相对值,即相对于前面一个timer还有多久到期。因此上面步骤的timer也需要进行转换。
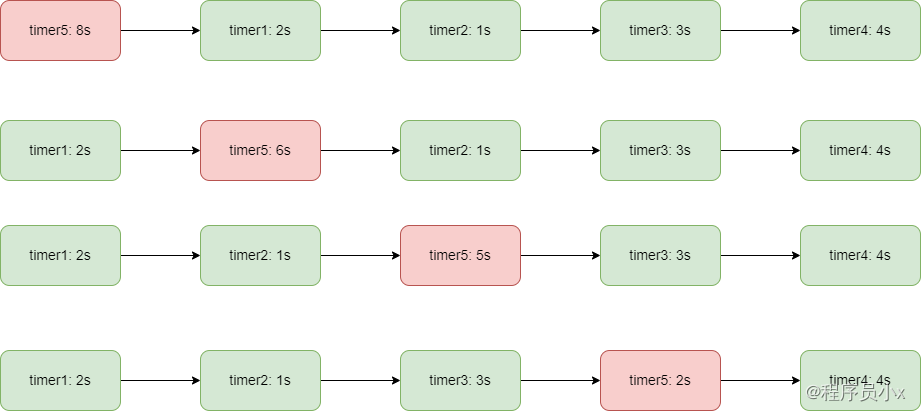
while (p->next && p->next->jiffies < p->jiffies) {
p->jiffies -= p->next->jiffies;//减去下一个timer的jiffies
fn = p->fn;//将当前的fn保存给临时变量
p->fn = p->next->fn;//将当前的fn设置为下一个timer的fn
p->next->fn = fn;//将下一个timer的fn设置为临时变量fn
jiffies = p->jiffies;//将jiffies保存给一个临时变量
p->jiffies = p->next->jiffies;//将当前的jiffies设置为下一个timer的jiffies
p->next->jiffies = jiffies;//将下一个timer的jiffies设置为当前的jiffies
p = p->next;
//这一步骤实际上将p向后挪动到合适的位置, 并把jiffies转化成相对值。
}
do_timer
void do_timer(long cpl)
该函数是时钟中断的处理函数。其在system_call.s中的timer_interrupt函数中被调用。
参数cpl表示的是当前的特权级, 0表示时钟中断发生时,当前运行在内核态,3表示时钟中断发生时,当前运行在用户态。
下面的代码根据cpl的值将进程PCB中的utime和stime进行修改。如果cpl为0,则增加stime(supervisor time), 如果cpl为3, 则增加utime。
if (cpl)
current->utime++;
else
current->stime++;
下面对定时器的链表进行遍历。 将链表的第一个定时器的滴答数减1。如果滴答数已经等于0, 代表该定时器已经到期,那么需要调用相应的处理程序进行处理。
if (next_timer) {
next_timer->jiffies--;
while (next_timer && next_timer->jiffies <= 0) {
void (*fn)(void);
fn = next_timer->fn;
next_timer->fn = NULL;
next_timer = next_timer->next;
(fn)();
}
}
下面代码则是将当前运行的进程的时间片减去1,如果此时进程时间片没有用完,该函数则返回。 如果此时进程时间已经用完,则将时间片设置为0。并且如果此时cpl表明中断发生用户态,那么还将会触发进程的调度。
if ((--current->counter)>0) return;
current->counter=0;
sys_alarm
int sys_alarm(long seconds)
该函数用于设置报警值。
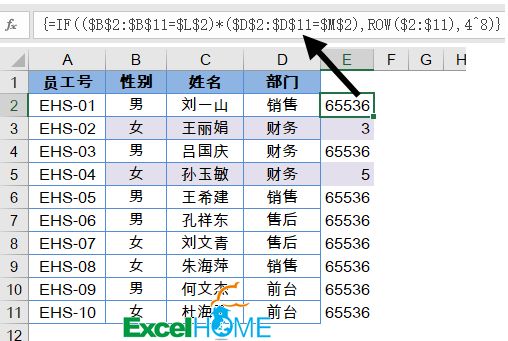
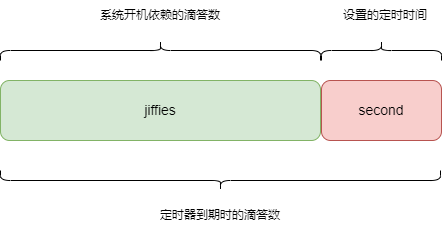
jiffies是指的是系统开机到目前经历的滴答数。
current->alarm的单位也是系统滴答数。
因此(current->alarm - jiffies) /100 就代表就是当前的定时器还剩下多少秒。
而设置alarm值则需要加上系统当前的滴答数据jiffies, 如下图所示:
sys_getpid
int sys_getpid(void)
该函数用于获取进程的pid。
sys_getppid
int sys_getppid(void)
该函数用于获取父进程的pid。
sys_getuid
int sys_getuid(void)
该函数用于获取用户的uid。
sys_geteuid
int sys_geteuid(void)
该函数用于获取用户的有效id(euid)。
sys_getgid
int sys_getgid(void)
获取组和id号(gid)。
sys_getegid
int sys_getegid(void)
取有效的组id(egid)
sys_nice
int sys_nice(long increment)
该函数的作用是降低进程在调度时的优先级。
sched_init
void sched_init(void)
该函数的作用是初始化进程调度模块。
首先在gdt表中设置任务0的tss和ldt值。接着对其他任务的tss和ldt进行初始化。
set_tss_desc(gdt+FIRST_TSS_ENTRY,&(init_task.task.tss));
set_ldt_desc(gdt+FIRST_LDT_ENTRY,&(init_task.task.ldt));
p = gdt+2+FIRST_TSS_ENTRY;
for(i=1;i<NR_TASKS;i++) {
task[i] = NULL;
p->a=p->b=0;
p++;
p->a=p->b=0;
p++;
}
显式地将任务0的tss加载到寄存器tr中, 显式地将任务0的ldt加载到ldtr中。
ltr(0);
lldt(0);
下面的代码用于初始化8253定时器。通道0,选择工作方式3,二进制计数方式。
outb_p(0x36,0x43); /* binary, mode 3, LSB/MSB, ch 0 */
outb_p(LATCH & 0xff , 0x40); /* LSB */
outb(LATCH >> 8 , 0x40); /* MSB */
设置时钟中断处理程序的处理函数, 设置系统调用的中断处理函数。
set_intr_gate(0x20,&timer_interrupt);
outb(inb_p(0x21)&~0x01,0x21);
set_system_gate(0x80,&system_call);