目录
1 问题一:内核移植时MTD分区问题
2 问题二:uboot的MTDPARTS_DEFAULT定义的MTD分区,bootargs中的文件系统分区,内核的mtd_partition smdk_default_nand_part定义的分区,三者要对应起来
3 问题三:uboot不再传tag地址了,那内核怎么知道bootargs的
5 问题五:linux内核官网的疑问
6 下载内核源码
7 安装交叉编译工具链
8 修改顶层Makefile
9 修改时钟频率
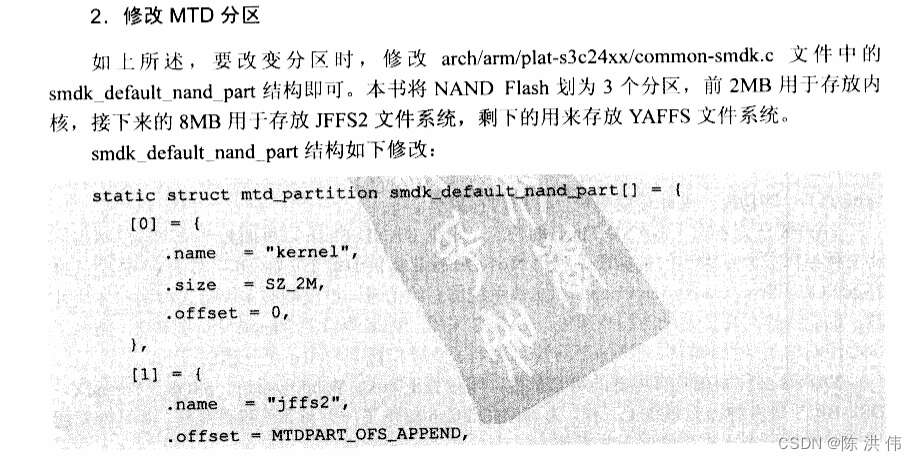
10 修改MTD分区
11 关闭软件ECC校验
12 支持yaffs文件系统
13 支持设备树
14 配置内核
14.1 make s3c2410_defconfig
15 编译内核和设备树文件
16 下载内核
17 参考文献
在移植linux内核之前,我先把韦老师的开发手册过了一遍,发现了好几个不太明白的问题,先把这些问题都弄明白再移植。
1 问题一:内核移植时MTD分区问题
Linux开发手册上,内核移植MTD分区那里,0地址保存的竟然是kernel,我记得之前0地址不都是保存的bootloader吗,
看到这里不理解,如果0地址保存的是kernel,那不是把bootloader覆盖了吗,搞不懂,一直没弄懂怎么回事,直到我往前翻,看到了uboot移植的介绍那里,我发现了这个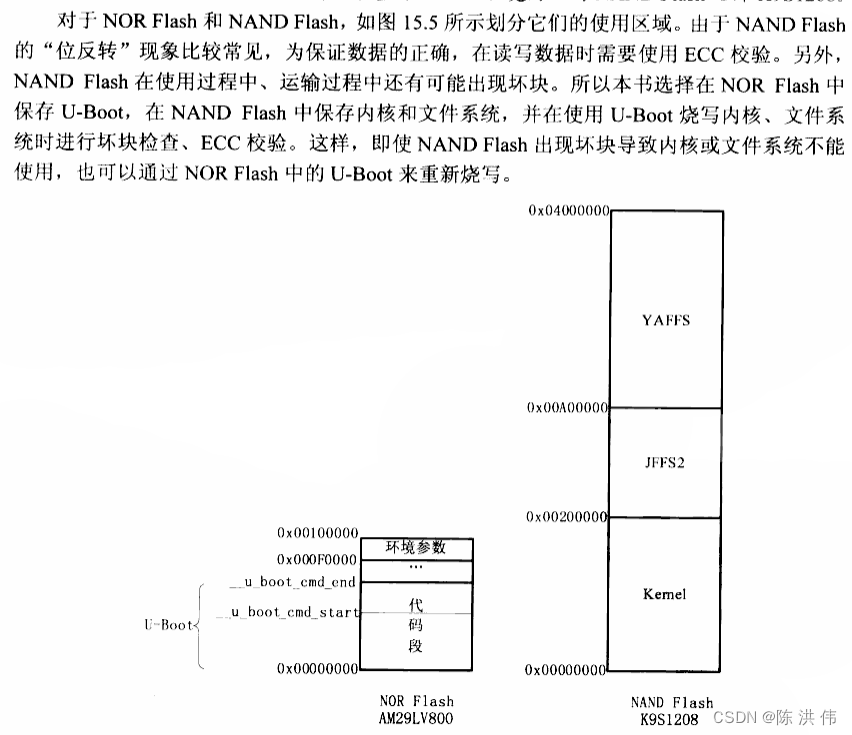
原来韦老师是把bootloader放到了norflash里面,怪不得nandflash的0就直接放kernel,因为我是先移植内核,先看的内核移植部分,所以没看到这里。 不过我移植内核的时候不会按老师这种方式做,我还是nandflash的0地址先放bootloader。
2 问题二:uboot的MTDPARTS_DEFAULT定义的MTD分区,bootargs中的文件系统分区,内核的mtd_partition smdk_default_nand_part定义的分区,三者要对应起来
这个是什么意思呢,就是uboot中有分区定义,如下
#define MTDIDS_DEFAULT "nand0=nandflash0"
#define MTDPARTS_DEFAULT "mtdparts=nandflash0:256k@0(bootloader)," \
"128k(device_tree)," \
"128k(params)," \
"4m(kernel)," \
"-(root)"这里uboot定义的是前面256k存放bootloader,然后接下来128k存放的是设备树,然后接下来128k存放的是参数,然后接下来4m保存的是内核,后面的是文件系统。
那么bootargs里面,root赋值就要是 root=/dev/mtdblock4
bootargs = "noinitrd root=/dev/mtdblock4 rw init=/linuxrc console=ttySAC0,115200";然后内核中 就要这么定义,
static struct mtd_partition smdk_default_nand_part[] = {
[0] = {
.name = "bootloader",
.size = SZ_256K,
.offset = 0,
},
[1] = {
.name = "device_tree",
.offset = MTDPART_OFS_APPEND,
.size = SZ_128K,
},
[2] = {
.name = "params",
.offset = MTDPART_OFS_APPEND,
.size = SZ_128K,
},
[3] = {
.name = "kernel",
.offset = MTDPART_OFS_APPEND,
.size = SZ_4M,
},
[4] = {
.name = "rootfs",
.offset = MTDPART_OFS_APPEND,
.size = MTDPART_SIZ_FULL,
}
};3 问题三:uboot不再传tag地址了,那内核怎么知道bootargs的
我看了韦老师的设备树里面用的uboot,他那里的uboot在调用theKernel的时候,第三个参数传进来的是设备树文件的地址,并没有传启动参数的保存地址也就是tag地址,那么内核怎么得到bootargs那些参数呢,这个问题也没想明白,在技术群里问了下,他们说可能是启动参数直接放设备树里面了,于是我去看了下设备树,在设备树中找到了下面一行,
chosen {
bootargs = "noinitrd root=/dev/mtdblock4 rw init=/linuxrc console=ttySAC0,115200";
};原来是把启动参数放到设备树里面了。
但是,看了下新版的uboot源码,其实新版里面是可以传tag,也可以传设备树文件地址。新版源码如下图,
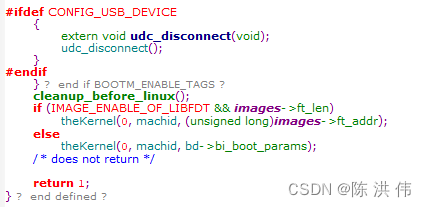
而韦老师是因为用的老版的uboot,但是又想在老板uboot里面支持设备树,所以韦老师修改如下
theKernel = (void (*)(int, int, uint))ntohl(hdr->ih_ep);
+ /* 100ask for device tree, no initrd image used */
+ if (argc == 4) {
+ of_flat_tree = (char *) simple_strtoul(argv[3], NULL, 16);
+
+ if (be32_to_cpu(*(ulong *)of_flat_tree) == OF_DT_HEADER) {
+ printf ("\nStarting kernel with device tree at 0x%x...\n\n", of_flat_tree);
+
+ cleanup_before_linux ();
+ theKernel (0, bd->bi_arch_number, of_flat_tree);
+
+ } else {
+ printf("Bad magic of device tree at 0x%x!\n\n", of_flat_tree);
+ }
+
+ }
+如果参数等于4就把设备树地址传给内核,这是因为使用设备树时候,我们输入的bootm命令是4个参数。
bootm <uImage_addr> // 无设备树,bootm 0x30007FC0
bootm <uImage_addr> <initrd_addr> <dtb_addr> // 有设备树
另外还一个问题就是在使用设备树的时候,如果也还是传输过来了bootargs,那么bootargs的优先级更高,
从设备树(dtb格式数据)中解析出bootargs_dts bootargs_正在起飞的蜗牛的博客-CSDN博客
(1)内核启动参数bootargs保存在设备树的chosen节点的bootargs属性;
(2)bootargs数据可以是在dts源文件中定义,也可以是uboot启动内核时传递给内核;
(3)优先级:uboot传递的bootargs参数优先级高于dts中定义的bootargs;
(4)如果是uboot传递的bootargs,在内核解压缩阶段就会调用atags_to_fdt()函数将tag中的bootargs参数转换成dtb的格式,写进dtb数据中;
这时候内核用的应该是zImage-dtb格式:vmlinuz/vmlinux、Image、zImage与uImage的区别_vmlinux和uimage_正在起飞的蜗牛的博客-CSDN博客
4 问题四:内核是怎么解析uboot传过来的tags地址或者设备树地址的
之前老的uboot里面,调用theKernel函数的时候,第三参数是tag地址也就是bootargs的那些地址,但是,新版的uboot里面,调用theKernel函数启动内核的时候,第三个参数可能是tags地址,也可能是设备树地址,那么内核肯定是两种方式都支持,那么是怎么支持的,这个我去看了下这一块的内核源码,先不看head.S了,直接去看start_kernel函数,
asmlinkage __visible void __init start_kernel(void)
{
char *command_line;
char *after_dashes;
set_task_stack_end_magic(&init_task);
smp_setup_processor_id();
debug_objects_early_init();
cgroup_init_early();
local_irq_disable();
early_boot_irqs_disabled = true;
/*
* Interrupts are still disabled. Do necessary setups, then
* enable them.
*/
boot_cpu_init();
page_address_init();
pr_notice("%s", linux_banner);
setup_arch(&command_line);
....
....//其他代码然后看这里面的setup_arch函数,在arch/arm/kernel/setup.c里面,
void __init setup_arch(char **cmdline_p)
{
const struct machine_desc *mdesc;
setup_processor();
/*这个__atags_pointer就是uboot穿进来的第三个参数,也就是tag地址或者设备树地址,然后这
个setup_machine_fdt里面是对设备树是否有效,*/
mdesc = setup_machine_fdt(__atags_pointer);
if (!mdesc)
mdesc = setup_machine_tags(__atags_pointer, __machine_arch_type);//上面判断设备树无效,那说明穿进来的就是tag地址了。那么解析tag。
if (!mdesc) {
early_print("\nError: invalid dtb and unrecognized/unsupported machine ID\n");
early_print(" r1=0x%08x, r2=0x%08x\n", __machine_arch_type,
__atags_pointer);
if (__atags_pointer)
early_print(" r2[]=%*ph\n", 16,
phys_to_virt(__atags_pointer));
dump_machine_table();
}
machine_desc = mdesc;这里面首先是setup_machine_fdt函数,在这个setup_machine_fdt函数里面调用early_init_dt_verify函数判断是否是有效的设备树,然后再解析设备树。
/**
* setup_machine_fdt - Machine setup when an dtb was passed to the kernel
* @dt_phys: physical address of dt blob
*
* If a dtb was passed to the kernel in r2, then use it to choose the
* correct machine_desc and to setup the system.
*/
const struct machine_desc * __init setup_machine_fdt(unsigned int dt_phys)
{
const struct machine_desc *mdesc, *mdesc_best = NULL;
#if defined(CONFIG_ARCH_MULTIPLATFORM) || defined(CONFIG_ARM_SINGLE_ARMV7M)
DT_MACHINE_START(GENERIC_DT, "Generic DT based system")
.l2c_aux_val = 0x0,
.l2c_aux_mask = ~0x0,
MACHINE_END
mdesc_best = &__mach_desc_GENERIC_DT;
#endif
if (!dt_phys || !early_init_dt_verify(phys_to_virt(dt_phys)))//判断是否有效的dtb
return NULL;
mdesc = of_flat_dt_match_machine(mdesc_best, arch_get_next_mach);
if (!mdesc) {
const char *prop;
int size;
unsigned long dt_root;
early_print("\nError: unrecognized/unsupported "
"device tree compatible list:\n[ ");
dt_root = of_get_flat_dt_root();
prop = of_get_flat_dt_prop(dt_root, "compatible", &size);
while (size > 0) {
early_print("'%s' ", prop);
size -= strlen(prop) + 1;
prop += strlen(prop) + 1;
}
early_print("]\n\n");
dump_machine_table(); /* does not return */
}
/* We really don't want to do this, but sometimes firmware provides buggy data */
if (mdesc->dt_fixup)
mdesc->dt_fixup();
early_init_dt_scan_nodes();如果early_init_dt_verify函数判断不是有效的设备树,那么就调用setup_machine_tags函数,把第三个参数当成tag地址来解析,总结一下就是
setup_arch
setup_machine_fdt
if (!dt_phys || !early_init_dt_verify(phys_to_virt(dt_phys)))//判断是否有效的dtb
early_init_dt_scan_nodes();
mdesc = setup_machine_tags(__atags_pointer, __machine_arch_type);前面的没成立,那么说明传进来的不是设备树文件地址,而是启动参数的tag地址,那么这里是直接解析tag参数了,5 问题五:linux内核官网的疑问
The Linux Kernel Archives

当我登录linux内核官网后,这里tarball是下载源码,然后后面我发现了两个东西patch和inc.patch,然后我鼠标放到patch提示Download patch to previous mainline,然后鼠标放到inc.patch提示Download incremental patch,搞不懂这两个有什么区别,然后我下载inc.patch发现名字是这样的patch-5.10.169-170.xz,那么这个应该是说5.10.169到5.10.170的补丁,但是patch是啥,在技术交流群里问了下,别人跟我说linux的主版本号,我还是不懂,然后我去查了下linux版本号问题,例如5.10.170.21吧,5.10是主版本好,170是次版本号,然后21是扩展版本号,所以这里的patch:Download patch to previous mainline意思是5.10.170针对5.10增加的补丁文件,好,懂了。
然后还一个就是官网主页只显示了几个内核版本,其他版本在上面的那个Http:Index of /pub/
6 下载内核源码
我去The Linux Kernel Archives
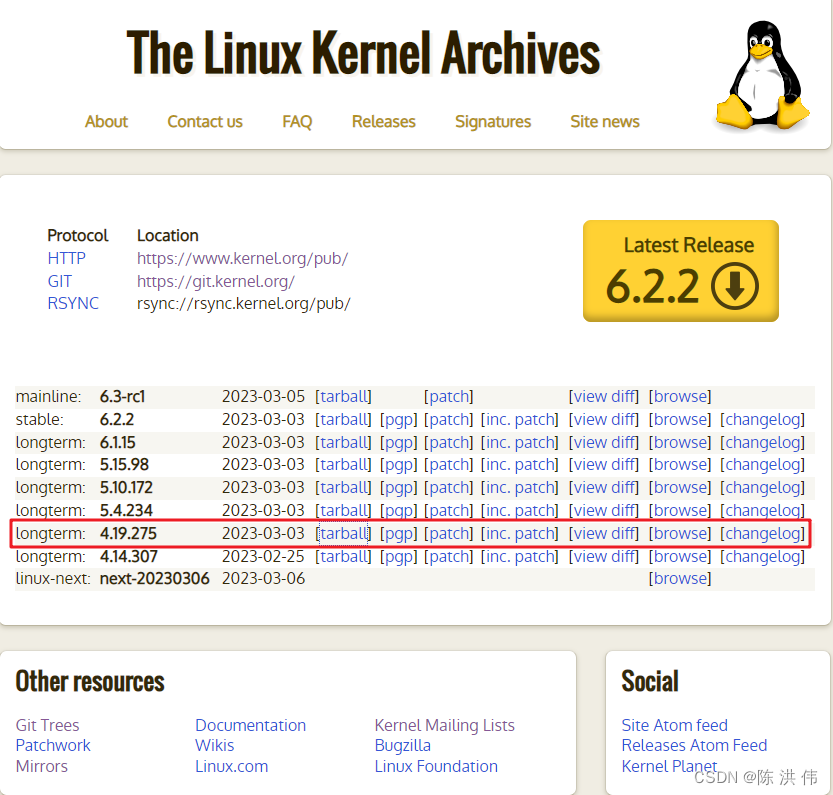
这里不下载最新的了,就用4.19.275吧,下载完之后用下面的命令解压。
xz -d linux-4.19.275.tar.xz
tar -xavf linux-4.19.275.tar7 安装交叉编译工具链
这里用gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabi.tar.xz,直接解压,然后设置环境变量就可以了,安装完之后我想看一下是否安装成功了,发现如下错误:
arm-linux-gcc --version
/usr/local/arm/4.3.2/bin/arm-linux-gcc: line 3: /usr/local/arm/4.3.2/bin/arm-none-linux-gnueabi-gcc: No such file or directory网上搜了下,这是因为操作系统是64位的,而交叉编译工具链是32位的,所以需要安装下面的包兼容32位。
sudo apt-get install lib32z18 修改顶层Makefile
这里修改交叉编译工具链
#ARCH ?= $(SUBARCH)
ARCH ?= arm
CROSS_COMPILE ?= arm-linux-gnueabi-9 修改时钟频率
arch/arm/mach-s3c24xx/mach-smdk2440.c中将时钟频率修改为12M,
static void __init smdk2440_init_time(void)
{
//s3c2440_init_clocks(16934400);
s3c2440_init_clocks(12000000);
samsung_timer_init();
}
10 修改MTD分区
arch/arm/mach-s3c24xx/common-smdk.c文件中,将代码
static struct mtd_partition smdk_default_nand_part[] = {
[0] = {
.name = "Boot Agent",
.size = SZ_16K,
.offset = 0,
},
[1] = {
.name = "S3C2410 flash partition 1",
.offset = 0,
.size = SZ_2M,
},
[2] = {
.name = "S3C2410 flash partition 2",
.offset = SZ_4M,
.size = SZ_4M,
},
[3] = {
.name = "S3C2410 flash partition 3",
.offset = SZ_8M,
.size = SZ_2M,
},
[4] = {
.name = "S3C2410 flash partition 4",
.offset = SZ_1M * 10,
.size = SZ_4M,
},
[5] = {
.name = "S3C2410 flash partition 5",
.offset = SZ_1M * 14,
.size = SZ_1M * 10,
},
[6] = {
.name = "S3C2410 flash partition 6",
.offset = SZ_1M * 24,
.size = SZ_1M * 24,
},
[7] = {
.name = "S3C2410 flash partition 7",
.offset = SZ_1M * 48,
.size = MTDPART_SIZ_FULL,
}
};修改为下面的代码
static struct mtd_partition smdk_default_nand_part[] = {
[0] = {
.name = "bootloader",
.size = SZ_256K,
.offset = 0,
},
[1] = {
.name = "device_tree",
.offset = MTDPART_OFS_APPEND,
.size = SZ_128K,
},
[2] = {
.name = "params",
.offset = MTDPART_OFS_APPEND,
.size = SZ_128K,
},
[3] = {
.name = "kernel",
.offset = MTDPART_OFS_APPEND,
.size = SZ_4M,
},
[4] = {
.name = "rootfs",
.offset = MTDPART_OFS_APPEND,
.size = MTDPART_SIZ_FULL,
}
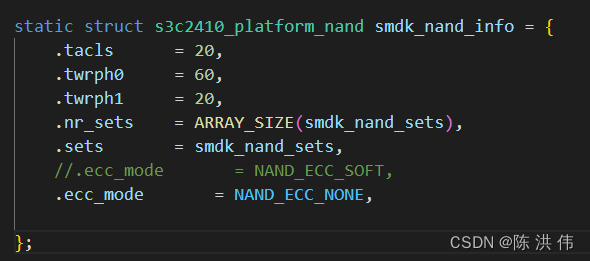
};11 关闭软件ECC校验
修改arch/arm/mach-s3c24xx/common-smdk.c文件:
12 支持yaffs文件系统
Get Yaffs | Yaffs - A Flash File System for embedded use
yaffs官网上让用下面的命令下载
git clone git://www.aleph1.co.uk/yaffs2然后需要运行文件系统里面的patch-ker.sh脚本文件,先./patch-ker.sh看一下使用说明
./patch-ker.sh
usage: ./patch-ker.sh c/l m/s kernelpath
if c/l is c, then copy. If l then link
if m/s is m, then use multi version code. If s then use single version code
所以这里

13 支持设备树
这里移植内核的时候想把设备树也用上,然后参考了韦东山老师的设备树教程以及彭东林老师的这个博客:https://www.cnblogs.com/pengdonglin137/p/6241895.html
使用下面的设备树文件
// SPDX-License-Identifier: GPL-2.0
/*
* SAMSUNG SMDK2440 board device tree source
*
* Copyright (c) 2018 weidongshan@qq.com
* dtc -I dtb -O dts -o jz2440.dts jz2440.dtb
*/
#define S3C2410_GPA(_nr) ((0<<16) + (_nr))
#define S3C2410_GPB(_nr) ((1<<16) + (_nr))
#define S3C2410_GPC(_nr) ((2<<16) + (_nr))
#define S3C2410_GPD(_nr) ((3<<16) + (_nr))
#define S3C2410_GPE(_nr) ((4<<16) + (_nr))
#define S3C2410_GPF(_nr) ((5<<16) + (_nr))
#define S3C2410_GPG(_nr) ((6<<16) + (_nr))
#define S3C2410_GPH(_nr) ((7<<16) + (_nr))
#define S3C2410_GPJ(_nr) ((8<<16) + (_nr))
#define S3C2410_GPK(_nr) ((9<<16) + (_nr))
#define S3C2410_GPL(_nr) ((10<<16) + (_nr))
#define S3C2410_GPM(_nr) ((11<<16) + (_nr))
/dts-v1/;
/ {
model = "SMDK24440";
compatible = "samsung,smdk2440";
#address-cells = <1>;
#size-cells = <1>;
memory@30000000 {
device_type = "memory";
reg = <0x30000000 0x4000000>;
};
/*
cpus {
cpu {
compatible = "arm,arm926ej-s";
};
};
*/
chosen {
bootargs = "noinitrd root=/dev/mtdblock4 rw init=/linuxrc console=ttySAC0,115200";
};
led {
compatible = "jz2440_led";
reg = <S3C2410_GPF(5) 1>;
};
};
将上述文件命名为jz2440.dts,放到arm/boot/dts/jz2440.dts
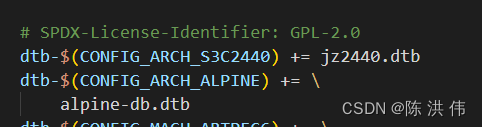
那同时要修改设备树里面的Makefile,增加 dtb-$(CONFIG_ARCH_S3C2440) += jz2440.dtb
前面设备树文件中compatible = "samsung,smdk2440";
那么在内核arch/arm/mach-s3c24xx/mach-smdk2440.c文件中首先增加如下定义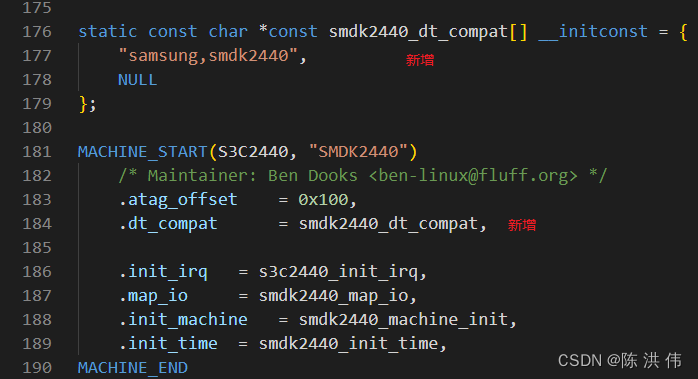
14 配置内核
14.1 make s3c2410_defconfig
我们首先使用make s3c2410_defconfig生成.config,然后再用make menuconfig图形化界面上微调。
make s3c2410_defconfig然后发现报错
HOSTCC scripts/basic/fixdep
HOSTCC scripts/kconfig/conf.o
YACC scripts/kconfig/zconf.tab.c
/bin/sh: 1: bison: not found
scripts/Makefile.lib:196: recipe for target 'scripts/kconfig/zconf.tab.c' failed
make[1]: *** [scripts/kconfig/zconf.tab.c] Error 127
Makefile:557: recipe for target 's3c2410_defconfig' failed
make: *** [s3c2410_defconfig] Error 2
网上搜索发现用如下方法解决
sudo apt install bison flex然后重新执行make s3c2410_defconfig,发现生成了.config,我们执行 make s3c2410_defconfig时所有配置项都被写到.config文件里面去了。
YACC scripts/kconfig/zconf.tab.c
LEX scripts/kconfig/zconf.lex.c
HOSTCC scripts/kconfig/zconf.tab.o
HOSTLD scripts/kconfig/conf
#
# configuration written to .config
#
14.2 make menuconfig
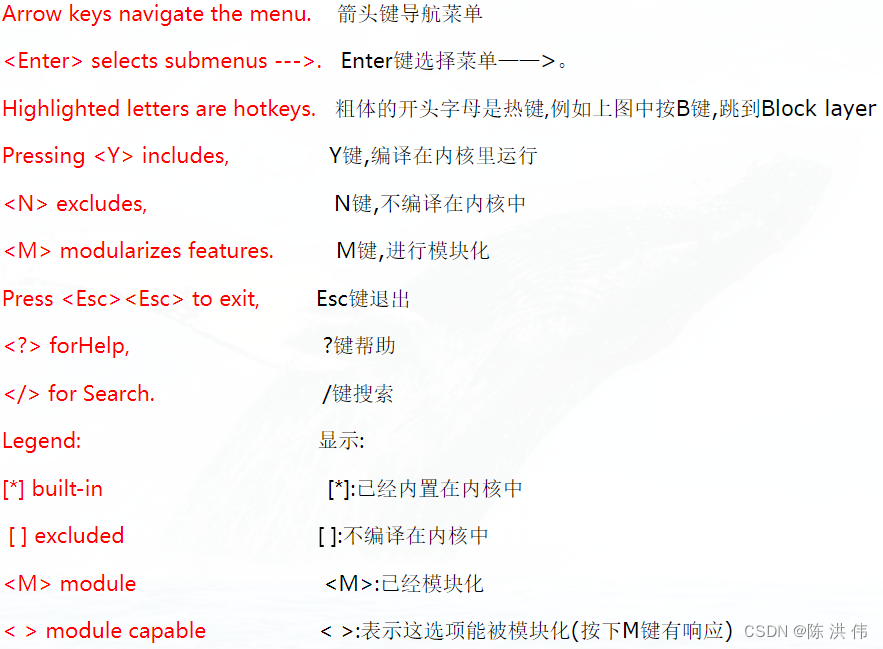
然后我们执行make menuconfig,make menuconfig其实会去读上面生成的.config文件,然后会出现一个菜单供我们选择。
make menuconfig
这里加一个菜单使用说明:改菜单截图自https://www.cnblogs.com/lifexy/p/7342031.html
这里首先要配置支持yaff2文件系统。
File systems --->
[*] Miscellaneous filesystems --->
<*> yaffs2 file system support然后再Boot options里面发现设备树默认是选上的。
15 编译内核和设备树文件
配置完成之后用下面命令编译
make uImage -j8报错
CALL scripts/checksyscalls.sh
CHK include/generated/compile.h
Kernel: arch/arm/boot/Image is ready
Kernel: arch/arm/boot/zImage is ready
UIMAGE arch/arm/boot/uImage
"mkimage" command not found - U-Boot images will not be built
arch/arm/boot/Makefile:90: recipe for target 'arch/arm/boot/uImage' failed
make[1]: *** [arch/arm/boot/uImage] Error 1
arch/arm/Makefile:336: recipe for target 'uImage' failed
make: *** [uImage] Error 2
说明缺少 mkimage ,有两种解决办法:
- 利用uboot生成mkimage工具,然后拷贝到/usr/bin 目录下
- 输入 sudo apt-get install u-boot-tools 命令在线安装;
这里直接用
sudo apt-get install u-boot-tools然后编译生成了uImage
CALL scripts/checksyscalls.sh
CHK include/generated/compile.h
Kernel: arch/arm/boot/Image is ready
Kernel: arch/arm/boot/zImage is ready
UIMAGE arch/arm/boot/uImage
Image Name: Linux-4.19.275
Created: Thu Mar 9 13:45:42 2023
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 3661464 Bytes = 3575.65 KiB = 3.49 MiB
Load Address: 30108000
Entry Point: 30108000
Kernel: arch/arm/boot/uImage is ready
然后还要编译设备树文件:
make dtbs生成arch/arm/boot/dts/jz2440.dtb。
16 下载内核
然后把uImage下载到开发板中,启动,发现卡住了。。。。。
NAND read: device 0 offset 0x40000, size 0x20000
Reading data from 0x5f800 -- 100% complete.
131072 bytes read: OK
## Booting image at 30007fc0 ...
Image Name: Linux-4.19.275
Created: 2023-03-09 6:59:04 UTC
Image Type: ARM Linux Kernel Image (uncompressed)
Data Size: 3660816 Bytes = 3.5 MB
Load Address: 30108000
Entry Point: 30108000
Verifying Checksum ... OK
OK
Starting kernel with device tree at 0x32000000...
我也不知道错在哪里了,我去内核中的init/main.c中增加打印,
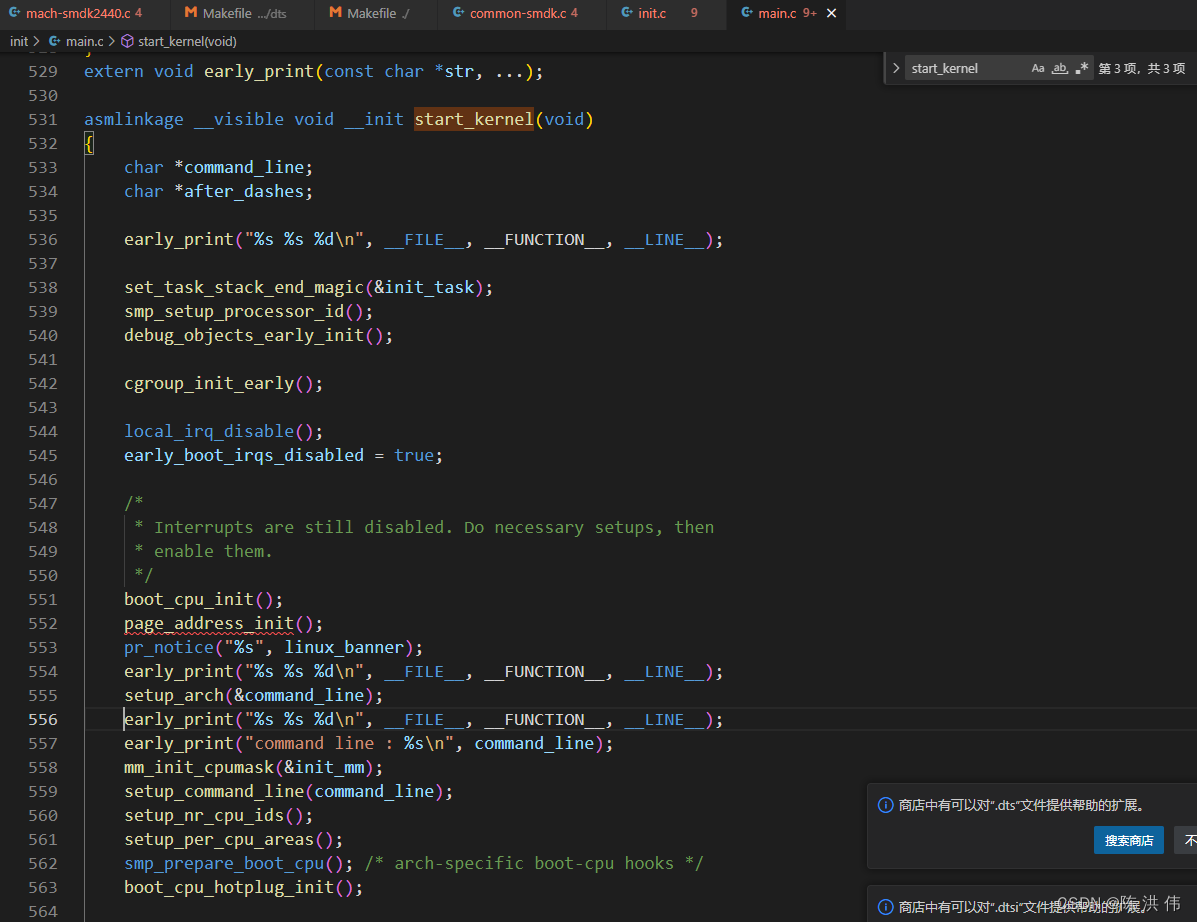
然后重新make uImage -j8,把内核下载进去,然后启动发现能打印出来

这说明内核已经到了start_kernel函数了,那我再加打印试试,
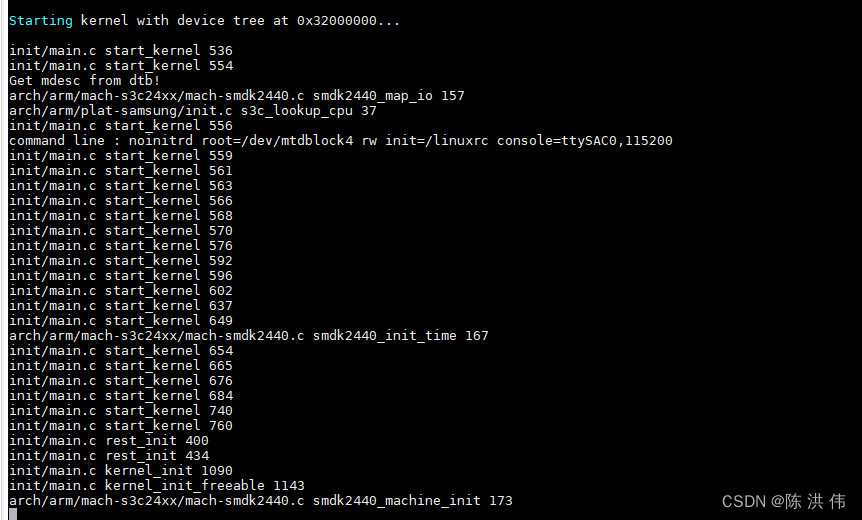
这样打印也看不出来啥问题,网上其他人在2440上移植内核的时候,看着都很顺利,不过他们没移植设备树,那我得问题很可能是移植设备树,然后有个什么地方我没弄好,我又回去去看了韦老师和彭东林老师的教程和博客。然后我发现了韦老师内核中有个这样的修改,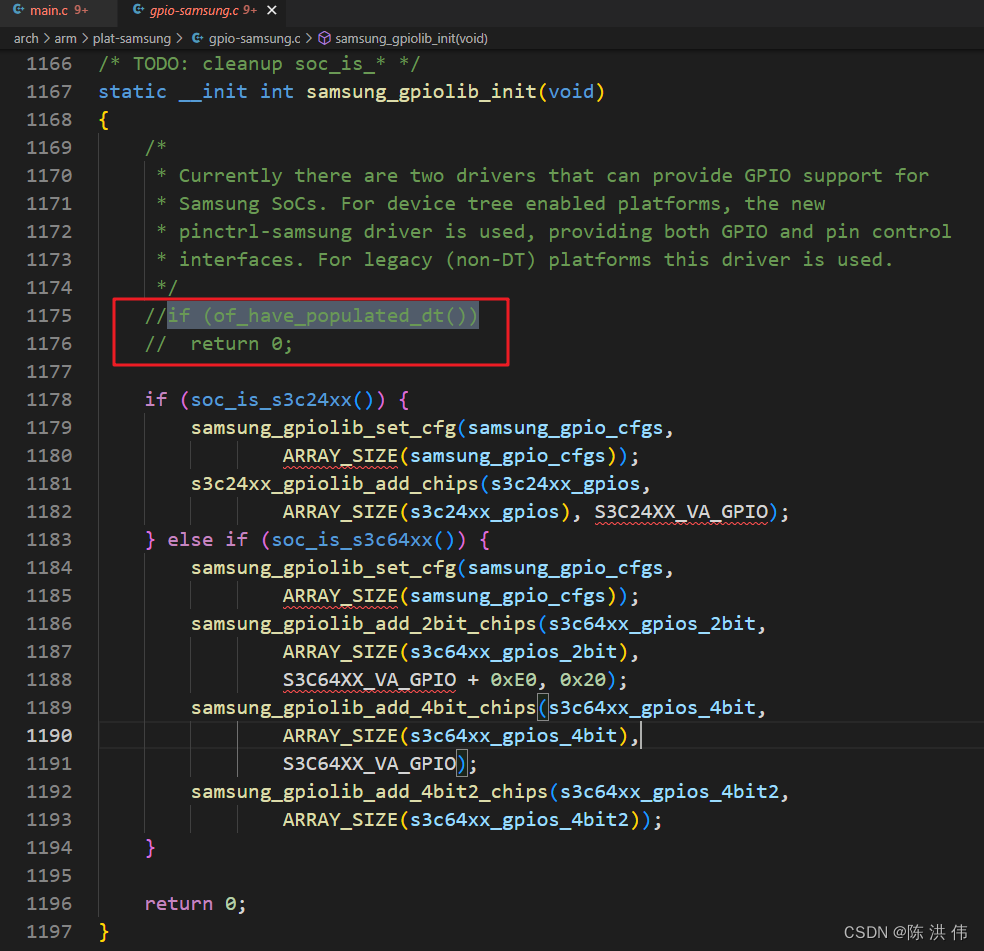
上面那段英文注释翻译过来是:目前有两种驱动程序可以为三星soc提供GPIO支持。对于支持设备树的平台,使用了新的pinctrl-samsung驱动程序,提供了GPIO和引脚控制接口。对于遗留(非dt)平台,使用这个驱动程序。
因为韦老师用了设备树文件,所以不注释掉的话,检测到设备树文件后,下面的那些初始化直接就不做了,但是韦老师的设备树文件又非常简单不完整,所以应该是内核少做了很多初始化工作,我把我的内核源码中这一块也注释掉,果然内核起来了。
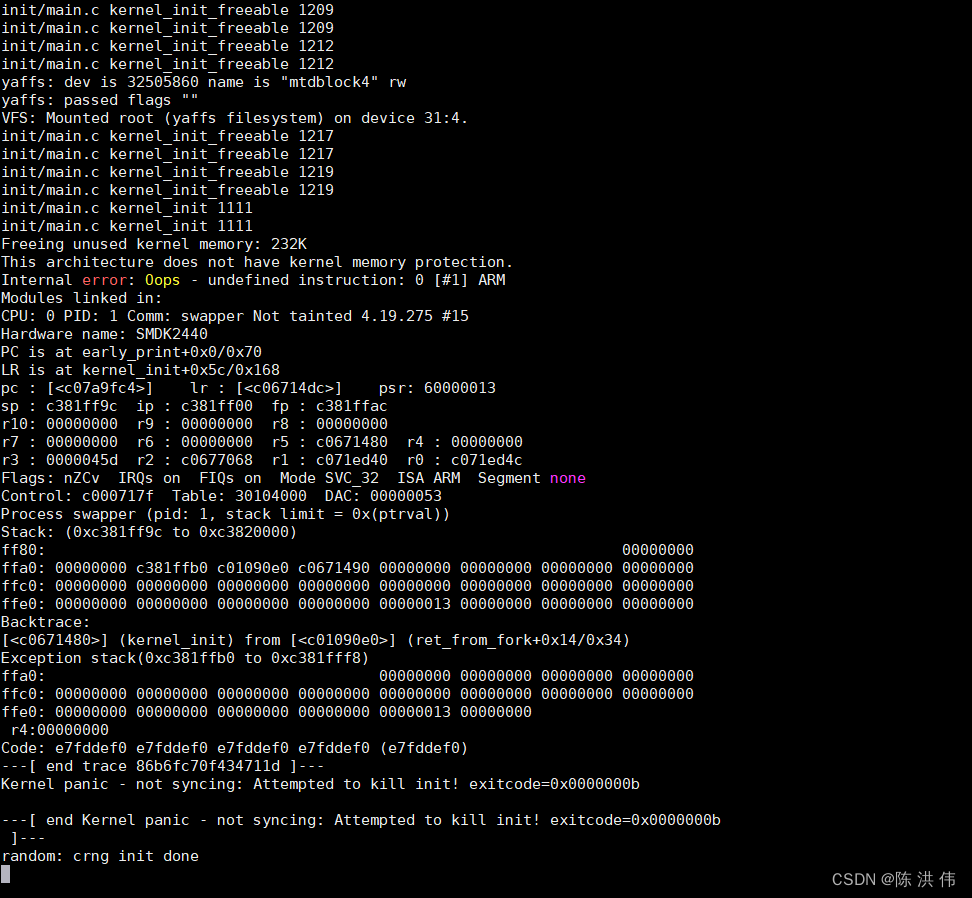
内核起来了,但是还有个错误,这是文件系统的问题,内核移植就先到这里了。
17 参考文献
TQ2440(S3C2440)移植Linux-4.0.1内核全过程_觉皇不秃头的博客-CSDN博客
讓TQ2440也用上設備樹(1)
S3C2440 移植最新5.2linux内核
Linux设备树学习(三)uboot和Linux中的设备树移植
JZ2440支持设备树(1)-添加设备树之后kernel的启动参数跟dts里面不一致
Mini2440之linux内核移植


![[数据结构与算法(严蔚敏 C语言第二版)]第1章 绪论(章节题库+答案解析)](https://img-blog.csdnimg.cn/860864cb82154a5ab5e61cbb8e888d9d.png)