文章目录
- 🚗 🚗Linux嵌入式开发 | 汇编驱动LED(1)
- 🚗 🚗初始化IO
- 🚗 🚗STM32
- 🚗 🚗使能GPIO时钟
- 🚗 🚗设置IO复用
- 🚗 🚗配置GPIO
- 🚗 🚗使用GPIO
- 🚗 🚗I.MX6ULL
- 🚗 🚗使能GPIO时钟
- 🚗 🚗设置IO复用
- 🚗 🚗配置GPIO
- 🚗 🚗配置GPIO功能
🚗 🚗Linux嵌入式开发 | 汇编驱动LED(1)
🚀🚀之前我们一直都是在介绍Linux的使用,接下来就开始进入真正的Linux嵌入式开发了,我们的第一个实验就是来使用汇编代码来驱动我们的LED灯,相信很多人不太理解,为什么需要使用汇编代码来操控LED灯,之前不管是51还是STM32都没有使用过汇编呀?确实,我们在之前都是使C语言来控制我们的IO的,那是因为汇编代码已经有人帮你写好了,但是现在我们使用Linux,就需要我们自己去写我们的汇编代码了,那么这些汇编代码有什么用呢?我们简单概述一下。
- 🚀🚀需要用汇编去初始化一些SOC外设。
- 🚀🚀使用汇编去初始化DDR。
- 🚀🚀设置SP指针,一般指向DDR,主要作用就是去设置好C语言运行环境。
🚗 🚗初始化IO
🚀🚀要点灯,其实也就是控制我们的GPIO,所以初始化IO就是我们的第一步,在讲解I.MX6ULL初始化IO之前,我们先来复习一下STM32是如何进行初始化IO的。
🚗 🚗STM32
🚀🚀对于STM32的部分我们不会进行详细的介绍,有兴趣的同学可以去看我的STM32笔记。
🚗 🚗使能GPIO时钟
🚀🚀我们首先需要做的就是去使能我们的时钟,具体的代码如下所示:
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); // 使能GPIO时钟
🚗 🚗设置IO复用
🚀🚀然后我们就需要把IO复用为GPIO,具体代码如下所示:
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
🚗 🚗配置GPIO
🚀🚀接下来就是对于GPIO进行配置了,主要就是一些电气属性,具体代码如下所示;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 |GPIO_Pin_10; // LED0和LED1的引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz ; // 输出速度选择50HZ
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // 推挽输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; // 选择上拉模式
🚗 🚗使用GPIO
🚀🚀最后我们就可以开心愉快地使用GPIO去点灯了。
🚀🚀但是I.MX6ULL的初始化IO就没这么简单了,我们接下来就来看一看I.MX6ULL是怎么去初始化的吧!
🚗 🚗I.MX6ULL
🚀🚀对于我们现在的I.MX6ULL,其实还是有一部分与STM32类似的,我们来重点介绍一下。
🚗 🚗使能GPIO时钟
🚀🚀和32一样,我们也需要去初始化时钟,在I.MX6ULL里面,CCGR0~CCGR6这7个寄存器控制着6ULL所有外设时钟的使能。我们来看一下CCM_CCGR0 结构:

🚀🚀CCM_CCGR0 是个 32 位寄存器,其中每 2 位控制一个外设的时钟,比如 bit31:30 控制着 GPIO2 的外设时钟,两个位就有 4 种操作方式,而不同的值代表着不同的涵义,所以我们可以按照我们的需求去进行配置。
| 位设置 | 时钟控制 |
|---|---|
| 00 | 所有模式下都关闭外设时钟。 |
| 01 | 只有在运行模式下打开外设时钟,等待模式和停止模式下均关闭外设时钟。 |
| 10 | 未使用(保留)。 |
| 11 | 除了停止模式以外,其他所有模式下时钟都打开。 |
🚀🚀比如我们需要使能GPIO2的时钟,我们只需要设置 CCM_CCGR0 的 bit31 和 bit30 都为 1 即可,代码如下所示:
CCM_CCGR0 = 3 << 30
🚗 🚗设置IO复用
🚀🚀对于IO复用,我们先找到寄存器IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03的介绍,然后看一下,如果我们需要复用为GPIO3的话,我们就应该将MUX_MODE设置为5,也就是将寄存器的bit3~0设置为0101=5,这样GPIO1_IO03就复用为GPIO。

🚗 🚗配置GPIO
🚀🚀接下来我们可以去找到寄存器IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03的介绍,这个寄存器主要是用来设置GPIO1_IO03的电气属性的,包括压摆率、速度、驱动能力、开漏、上下拉等。

🚀🚀我们接下来详细介绍一下各个位大致是做上什么的。
🚀🚀SRE(bit0):设置压摆率,当此位为 0 的时候是低压摆率,当为 1 的时候是高压摆率。这里的压摆率就是 IO 电平跳变所需要的时间,比如从 0 到 1 需要多少时间,时间越小波形就越陡,说明压摆率越高;反之,时间越多波形就越缓,压摆率就越低。
🚀🚀DSE(bit5:3):当 IO 用作输出的时候用来设置 IO 的驱动能力, 总共有 8 个可选选项,如下所示:
| 位设置 | 速度 |
|---|---|
| 000 | 输出驱动关闭 |
| 001 | R0(3.3V 下 R0 是 260Ω,1.8V 下 R0 是 150Ω,接 DDR 的时候是 240Ω) |
| 010 | R0/2 |
| 011 | R0/3 |
| 100 | R0/4 |
| 101 | R0/5 |
| 110 | R0/6 |
| 111 | R0/7 |
🚀🚀SPEED(bit7:6):当 IO 用作输出的时候,此位用来设置 IO 速度,设置如下所示:
| 位设置 | 速度 |
|---|---|
| 00 | 低速 50M |
| 01 | 中速 100M |
| 10 | 中速 100M |
| 11 | 最大速度 200M |
🚀🚀ODE(bit11):当 IO 作为输出的时候,此位用来禁止或者使能开路输出,此位为 0 的时候禁止开路输出,当此位为 1 的时候就使能开路输出功能。
🚀🚀PKE(bit12):此位用来使能或者禁止上下拉/状态保持器功能,为 0 时禁止上下拉/状态保持器,为 1 时使能上下拉和状态保持器。
🚀🚀PUE(bit13):当 IO 作为输入的时候,这个位用来设置 IO 使用上下拉还是状态保持器。当为 0 的时候使用状态保持器,当为 1 的时候使用上下拉。状态保持器在 IO 作为输入的时候才有用,也就是当外部电路断电以后此 IO 口可以保持住以前的状态。
🚀🚀PUS(bit15:14):用来设置上下拉电阻的,一共有四种选项可以选择,如下所示:
| 位设置 | 含义 |
|---|---|
| 00 | 100K 下拉 |
| 01 | 47K 上拉 |
| 10 | 100K 上拉 |
| 11 | 22K 上拉 |
🚀🚀HYS(bit16):对应图 8.1.4.2 中 HYS,用来使能迟滞比较器,当 IO 作为输入功能的时候有效,用于设置输入接收器的施密特触发器是否使能。如果需要对输入波形进行整形的话可以使能此位。此位为 0 的时候禁止迟滞比较器,为 1 的时候使能迟滞比较器。
🚗 🚗配置GPIO功能
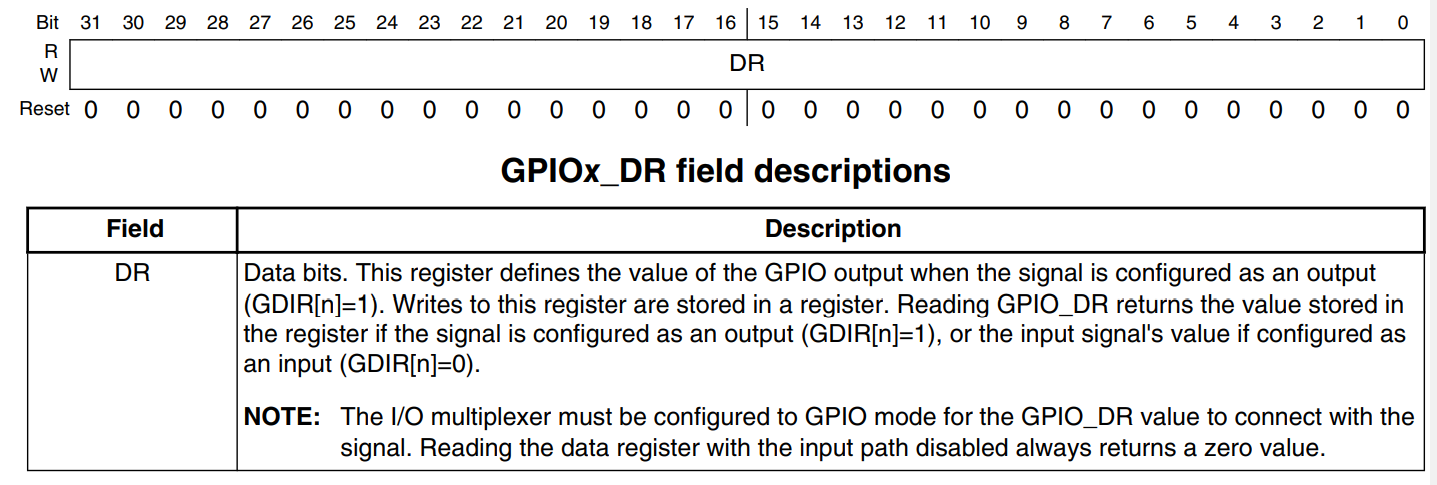
🚀🚀与32不同的是,我们还需要进行配置GPIO功能,设置输入输出。设置GPIO1_DR寄存器bit3为1,也就是设置为输出模式。设置GPIO1_DR寄存器的bit3,为1表示输出高电平,为0表示输出低电平。
🚀🚀好了,原理部分我们就先介绍这么多,到时候我们会分析具体的实现原理。