文章目录
- 实现思路
- 配置opencv
- 位置剪裁
- 实现代码
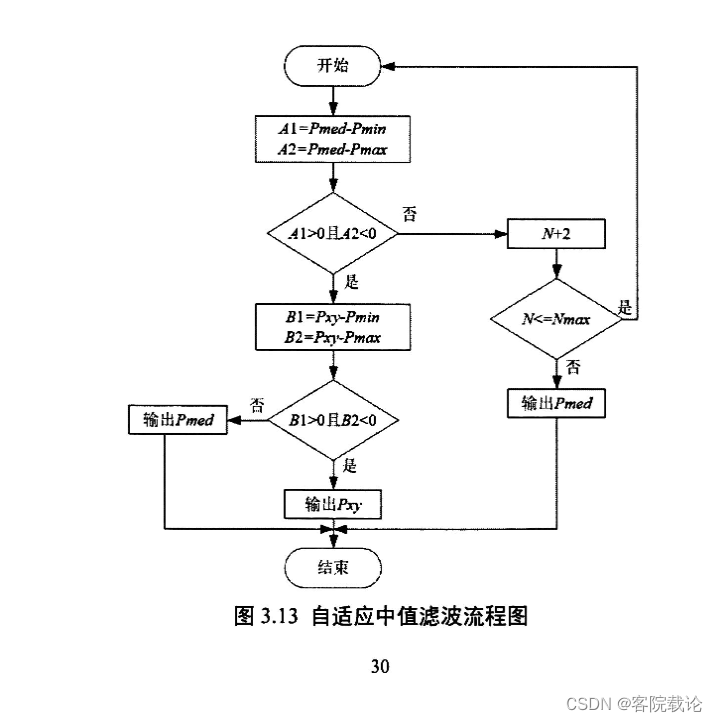
- 自适应中值滤波
- 实现代码
- 动态范围增强
- 实现代码
- 形态学处理
- 实现代码
- 图片预处理效果
- 计算帧差
- 连续帧帧差法原理和实现代码
- 实现代码
- K近邻实现
- 基本介绍
- 实现过程
- 参考
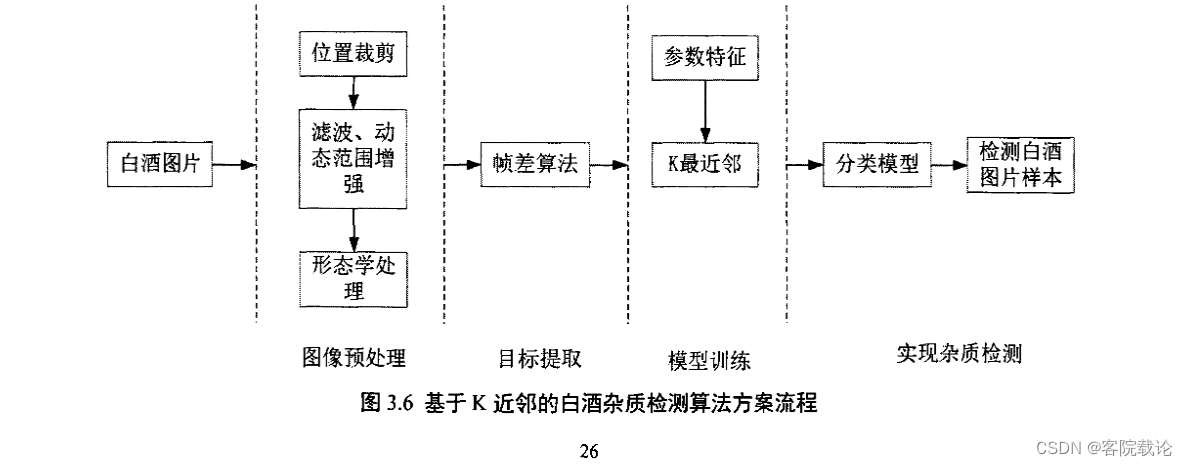
实现思路
- 使用C++进行实现,开发平台是clion,并没有使用深度学习,使用opencv进行开发
配置opencv
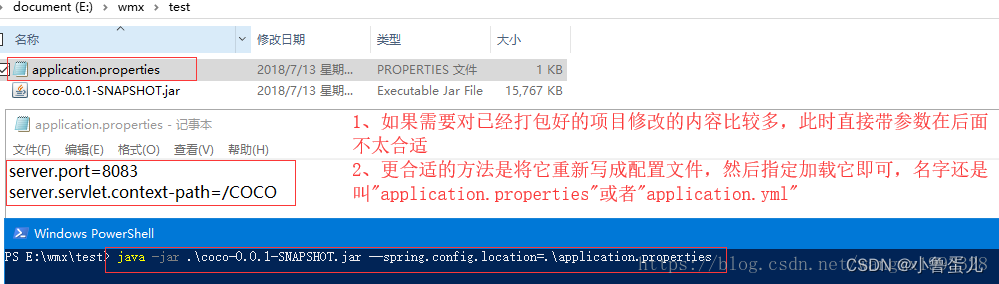
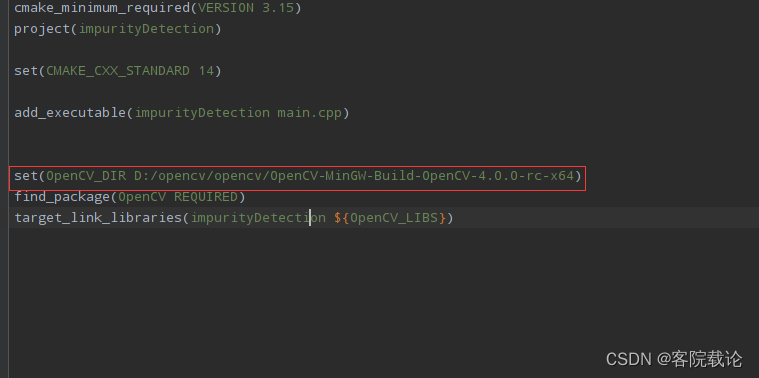
-
一开始就出来幺蛾子,之前装好的opencv怎么都找不到包,弄了一个小时,夹着红框后面的三句,告诉clion我安装的opencv包的具体位置,可能是因为我之前没有编译成功,直接间别人编译好的直接下载下来的,不过我为什么不用python上面的opencv那。
-
位置剪裁

- 相机位置固定,拍摄的位置固定,背景干扰很少,只需要保存红框右半部分的内容即可,左半部分去除。
实现代码
#include <opencv2/opencv.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/core/core.hpp>
#include <iostream>
#include <fstream>
using namespace std;
using namespace cv;
struct RectPoint{
int x,y;
int width,height;
RectPoint(int x,int y,int width,int height):x(x),y(y),width(width),height(height){}
};
void ClipImage(String ImagePath,RectPoint rect,String TargetPath){
// 声明Mat保存图片
Mat img;
Rect m_select;
string line;
// 判定文件存在
ifstream input_file(ImagePath);
if (!input_file.is_open()) {
cerr << "Could not open the file - '"
<< ImagePath << "'" << endl;
return;
}
while(getline(input_file,line)){
// 获取文件后缀名,并进行拼接成目标文件名
string ImageName = line.substr(line.find_last_of('\\',line.size())+1);
string TargetName = TargetPath;
TargetName.append(ImageName);
// 读取并剪裁图片到特定大小保存
img = imread(line);
m_select = Rect(rect.x,rect.y,rect.width,rect.height);
Mat ROI = img(m_select);
imwrite(TargetName,ROI);
}
}
int main()
{
String TargetImage = R"(E:\CProject\impurityDetection\ClippedImage\)";
String SourceImage = R"(E:\CProject\impurityDetection\image\path.txt)";
ClipImage(SourceImage,RectPoint(600,0,1780,1480),TargetImage);
return 0;
}
自适应中值滤波
- 自适应中值滤波,是为了去除照相机的噪声同时,又不损坏原来的杂质信息,这里使用自适应中值滤波,具体实现如下。
实现代码
void Convolution(Mat &SourceImage,vector<int> &pixels,int x,int y ,int border){
for (int k = -border; k <= border; k++)
{
for (int l = -border; l <= border; l++)
{
pixels.push_back(SourceImage.at<uchar>(x+k, y+l));
}
}
}
Mat SelfAdaptMedianFilter(const Mat& SourceImage){
// 复制原图
Mat result = SourceImage.clone();
// 掩膜大小为3
int ksize = 3;
int border = ksize /2 ;
for (int i = border; i < SourceImage.rows - border; i++)
{
for (int j = border; j < SourceImage.cols - border; j++)
{
while(1){
// 提取当前像素的邻域
vector<int> pixels;
Convolution(result, pixels, i, j, border);
// 对邻域像素值进行排序
sort(pixels.begin(), pixels.end());
// 取中值作为当前像素的新值
int median = pixels[pixels.size() / 2];
int PMax = pixels[pixels.size() - 1];
int PMin = pixels[0];
//判定是否为异常值
if (median == PMax || median == PMin) {
// 掩膜再加2,重新计算
ksize += 2;
if (ksize + 2 > Nmax) {
result.at<uchar>(i, j) = median;
break;
}else{
// 判定传入的值,是否出现越界的情况
if((i - ksize / 2 < 0 || i + ksize / 2 < SourceImage.cols) ||
j - ksize / 2 < 0 || j + ksize / 2 > SourceImage.rows)
result.at<uchar>(i,j) = (PMax + PMin) / 2;
}
} else {
//中值不是极值,判定原像素点是不是极值,然后在进行输出
if (result.at<uchar>(i, j) == PMax || result.at<uchar>(i, j) == PMin)
result.at<uchar>(i,j) = median;
break;
}
}
}
}
return result;
}
动态范围增强
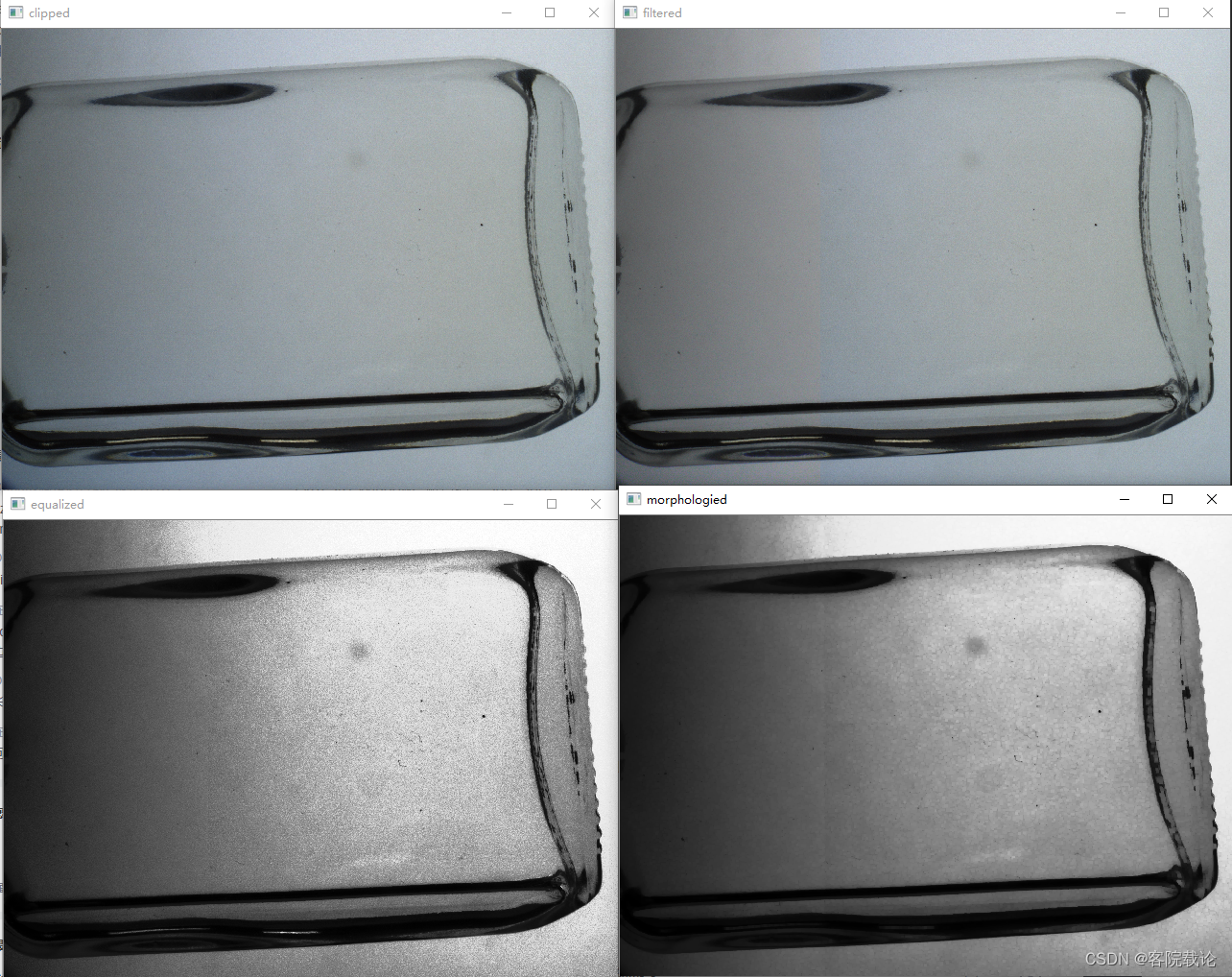
- 这里就是图像的直方图均衡化,使得整个模型的图片颜色对比度更大,显示出更多的细节。
实现代码
//对图片进行直方图均衡化,凸显出前后差异
Mat equalized;
// 转成二值化,并变为直方图均衡化
cvtColor(ROI, equalized, COLOR_BGR2GRAY);
equalizeHist(equalized, equalized);
形态学处理
- 膨胀操作 :通过增加图像中的物体的像素数量,使得物体的大小和面积增加,边缘变得更加明显,改变了原来字体粗细
- 腐蚀操作 :在卷积核大小中对图片进行卷积。取图像中(3 * 3)区域内的最小值。可以消除图像中的毛刺和噪声。改变了原来字体粗细
- 开运算 :先腐蚀运算,在进行膨胀运算。在不损害字体信息的情况下,去除了噪声和毛刺。通过调整卷积可以进一步减少噪声
- 闭运算 :先膨胀运算,在进行腐蚀运算。在不去除任何噪声的情况下,补全了缺失的信息。
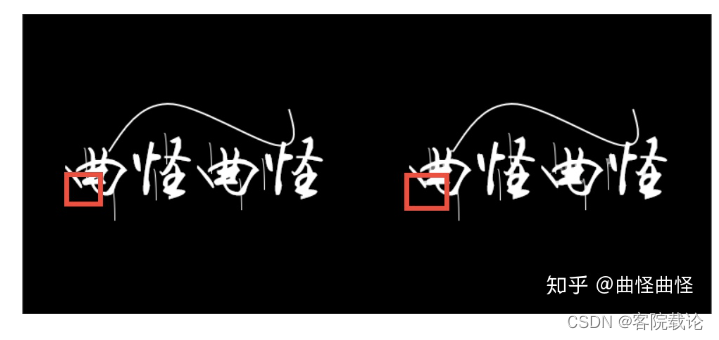
- 这里选择开运算,具体实现代码如下,别的可以参考知乎链接
实现代码
// 对图像进行开运算,
Mat morphologied;
int size = 3;
// shape是内核的形状,size是内核的尺寸,锚点的位置,对于矩形来说,全部都是 1 ,不用调整
cv::Mat element = cv::getStructuringElement(cv::MORPH_RECT,
cv::Size(2*size + 1, 2*size+1),
cv::Point(size, size));
cout<<element<<endl;
morphologyEx(equalized, morphologied, cv::MORPH_OPEN, element);
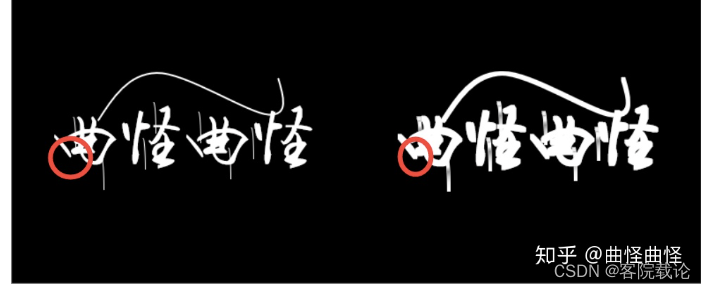
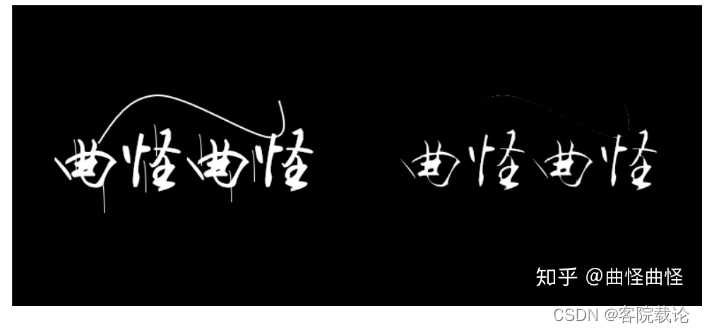
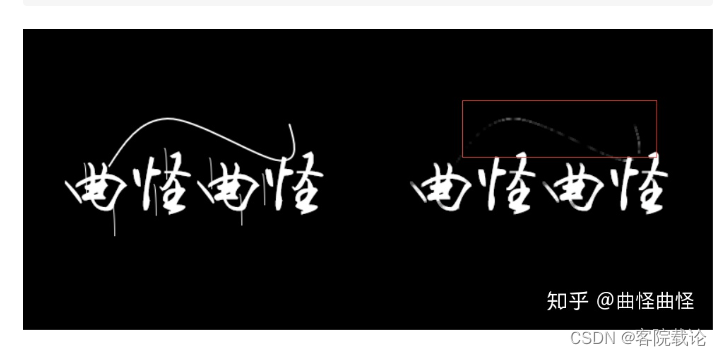
图片预处理效果
计算帧差
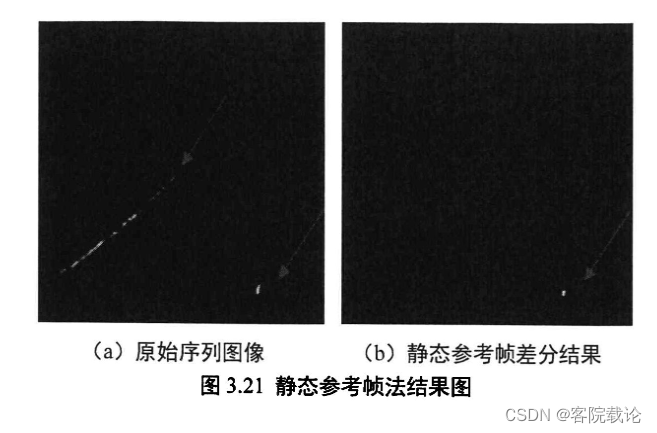
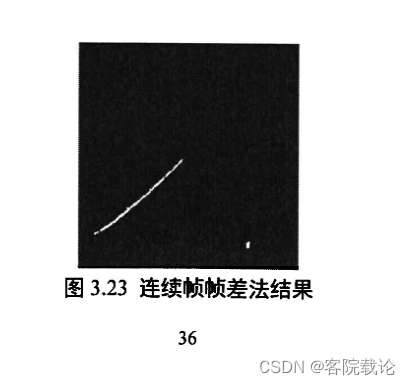
- 主要有两种方法,分别是静态参考帧差分法和连续帧帧差法,下图为两个效果,很明显的可以就看到连续帧帧差法的效果更好,常见的静态帧是将多个帧进行平均,然后以平均之后的帧作为参考帧,然后后面每帧都是和当前帧作比较,没有动作的连续性。
连续帧帧差法原理和实现代码
-
实现原理如下图

-
使用absdiff函数,具体描述如下,计算frame1和frame2的帧差,然后将结果保存到framediff中
cv::Mat frameDiff;
cv::absdiff(frame1, frame2, frameDiff);
实现代码
//计算帧差,并将最终的结果进行返回
Mat DifFrame(Mat PreFrame,Mat CurFrame,Mat NextFrame){
//计算帧差
Mat FrameDiffPre , FrameDiffNext;
absdiff(PreFrame,CurFrame,FrameDiffPre);
absdiff(CurFrame,NextFrame,FrameDiffNext);
// 分别进行二值化,设定二值化的阈值
Mat BinImgPre , BinImgNext;
threshold(FrameDiffPre,BinImgPre,128,255,cv::THRESH_BINARY);
threshold(FrameDiffNext,BinImgPre,128,255,cv::THRESH_BINARY);
// 将图片进行与运算,然后将结果进行输出
Mat ResFrame;
bitwise_and(FrameDiffPre,FrameDiffNext,ResFrame);
//返回最终处理过后的帧
return ResFrame;
}
K近邻实现
基本介绍
- 思路 : 将样本在特征空间中,根据一定的分类方法,归类于与该样本最相似的K个样本中大多数的那一类。需要一部分已经标注过的样本,然后将未标注过的样本进行分类。
- 特点 :
实现过程
参考
- Opencv 图像处理之膨胀与腐蚀 【https://zhuanlan.zhihu.com/p/110330329】