目录
PWM文件
指令操作PWM
程序操作PWM
程序说明
程序代码
3_PWM_1.c
启动交叉编译工具
编译
拷贝到开发板
测试
PWM文件
在/sys/class/pwm目录下,存放了PWM的文件。
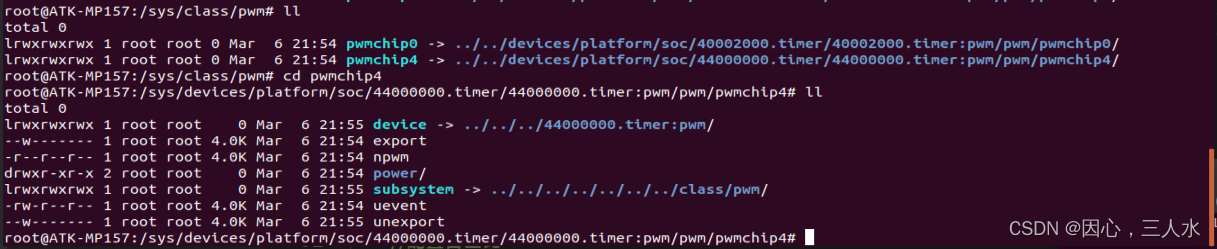
pwmchip0和pwmchip4目录对应了MP157 SoC的2个PWM控制器,pwmchip0对应的是MP157的TIM4,而pwmchip4对应的则是TIM1,并且STM32MP157只提供了一个PWM通道(PA10--TIM1_CH3)。TIM4_CH2用作LCD背光控制。
npwm:只读文件,读取该文件可以得知该PWM控制器下共有几路PWM输出。
cat npwm
export:在使用PWM之前,需要将其导出,通过export属性进行导出。
echo 2 > export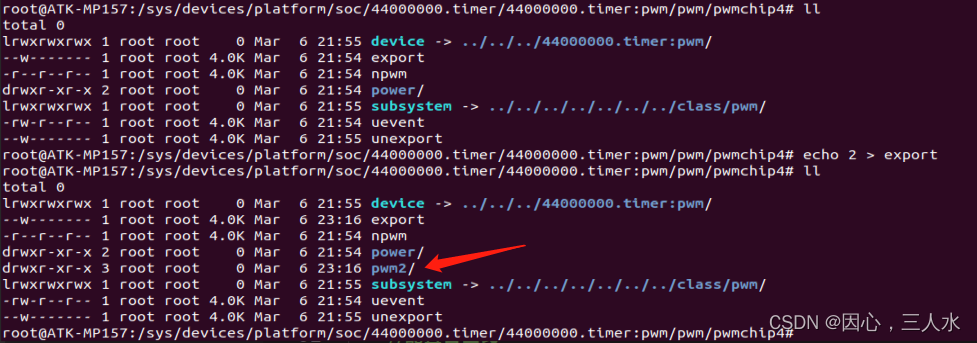
| 数字 | 对应的通道 |
|---|---|
| 0 | CH1 |
| 1 | CH2 |
| 2 | CH3 |
| 3 | CH4 |
unexport:将导出的PWM通道删除。
echo 2 > unexport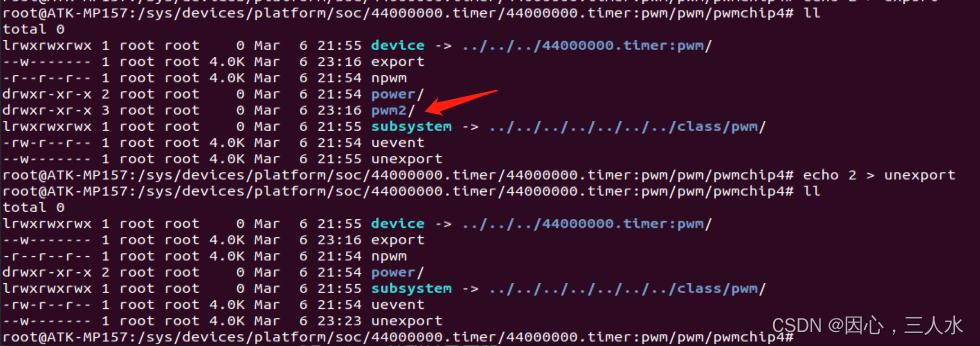
指令操作PWM
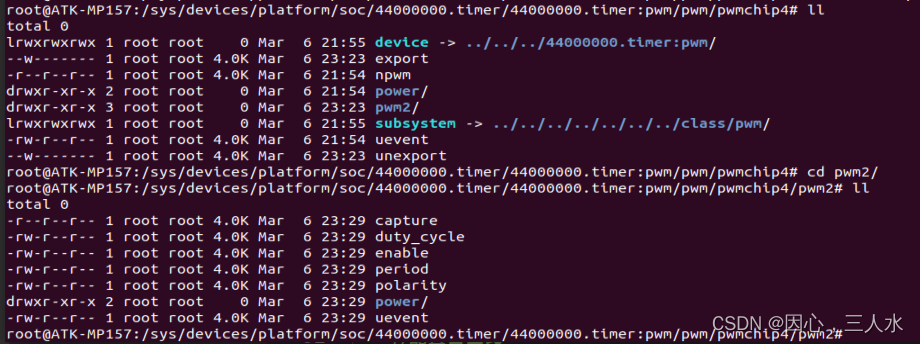
period:用于配置PWM周期,可读可写;写入一个字符串数字值,以ns(纳秒)为单位。最小值为5000。
echo 1000000 > period #设置1ms的周期
duty_cycle:用于配置PWM的占空比,可读可写;写入一个字符串数字值,是以ns为单位。
echo 500000 > duty_cycle #设置0.5ms的占空比
polarity:用于设置极性,可读可写,可写入的值: "normal":普通; "inversed":反转。
echo normal > polarity #设置普通极性
enable:可读可写,写入"0"表示禁止PWM;写入"1"表示使能PWM。读取该文件获取PWM当前是禁止还是使能状态。通常配置好PWM之后,再使能PWM。
echo 1 > enable #使能PWM
程序操作PWM
程序说明
./xxx 参数1 参数2参数1:周期,以us为单位,最小值为5。
参数2:占空比,百分比。
0~100:占空比的百分比。
程序代码
3_PWM_1.c
/*
PWM控制
*/
#include <stdio.h>
#include <stdlib.h>
#include <ctype.h>
#include <unistd.h>
#include <fcntl.h>
#include <string.h>
//./xxx 周期 占空比(百分比)
static char PWM_path[] = "/sys/class/pwm/pwmchip4/pwm2";
static char PWM_export_path[] = "/sys/class/pwm/pwmchip4/export";
static char PWM_period_path[] = "/sys/class/pwm/pwmchip4/pwm2/period";
static char PWM_duty_cycle_path[] = "/sys/class/pwm/pwmchip4/pwm2/duty_cycle";
static char PWM_polarity_path[] = "/sys/class/pwm/pwmchip4/pwm2/polarity";
static char PWM_enable_path[] = "/sys/class/pwm/pwmchip4/pwm2/enable";
int main(int argc, char *argv[])
{
//检查参数个数
if (argc != 3)
{
printf("%s文件的参数个数错误!\n", argv[0]);
return -1;
}
//检查参数
char *endptr;
//检查参数1是否为纯数字
strtol(argv[1], &endptr, 10);
if ((endptr == argv[1]) || ((!isspace(*endptr)) && (*endptr != '\0')))
{
perror("参数错误!\n");
return -1;
}
endptr = NULL;
//检查参数2是否为纯数字
strtol(argv[2], &endptr, 10);
if ((endptr == argv[2]) || ((!isspace(*endptr)) && (*endptr != '\0')))
{
perror("参数错误!\n");
return -1;
}
//检查参数1的取值范围:>=5
int ZhouQi = atol(argv[1]);
if (ZhouQi < 5)
{
perror("参数错误!\n");
return -1;
}
//检查参数2的取值范围:0-100
int ZhanKongBi = atol(argv[2]);
if (ZhanKongBi < 0 || ZhanKongBi > 100)
{
perror("参数错误!\n");
return -1;
}
//检查PWM是否导出
int fd;
if (access(PWM_path, F_OK))
{
if (0 > (fd = open(PWM_export_path, O_WRONLY)))
{
perror("文件打开错误!\n");
return -1;
}
if (strlen("2") != (write(fd, "2", strlen("2"))))
{
perror("PWM文件导出错误!\n");
return -1;
}
close(fd);
}
//配置周期
if (0 > (fd = open(PWM_period_path, O_WRONLY)))
{
perror("period文件打开错误!\n");
return -1;
}
char str[100];
sprintf(str, "%d", ZhouQi * 1000);
if (strlen(str) != write(fd, str, strlen(str)))
{
perror("配置周期错误!\n");
return -1;
}
close(fd);
//配置占空比
if (0 > (fd = open(PWM_duty_cycle_path, O_WRONLY)))
{
perror("duty_cycle文件打开错误!\n");
return -1;
}
sprintf(str, "%d", ZhouQi * 10 * ZhanKongBi );
if (strlen(str) != write(fd, str, strlen(str)))
{
perror("配置占空比错误!\n");
return -1;
}
close(fd);
//配置极性
if (0 > (fd = open(PWM_polarity_path, O_WRONLY)))
{
perror("polarity文件打开错误!\n");
return -1;
}
if (strlen("normal") != write(fd, "normal", strlen("normal")))
{
perror("配置极性错误!\n");
return -1;
}
close(fd);
//使能
if (0 > (fd = open(PWM_enable_path, O_WRONLY)))
{
perror("enable文件打开错误!\n");
return -1;
}
if (strlen("1") != write(fd, "1", strlen("1")))
{
perror("使能错误!\n");
return -1;
}
close(fd);
return 0;
}启动交叉编译工具
source /opt/st/stm32mp1/3.1-snapshot/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi
编译
${CC} -o 3_PWM_1 3_PWM_1.c
拷贝到开发板
scp 3_PWM_1 root@10.3.22.219:/home/root/Linux_C_YingYong_BianCheng/JiaoCheng/3_PWM/

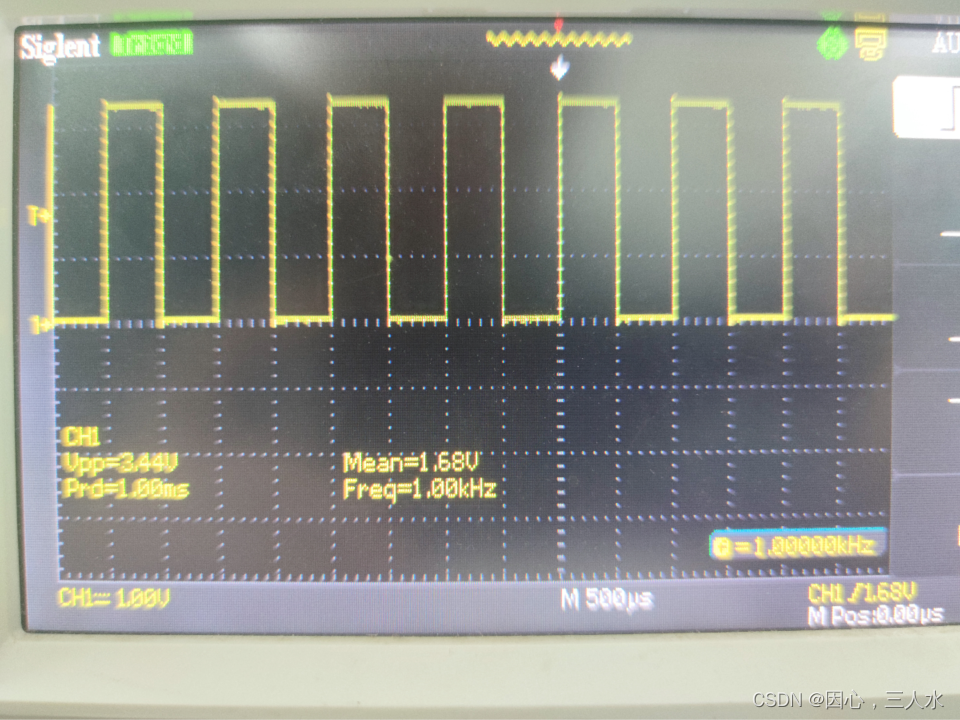
测试
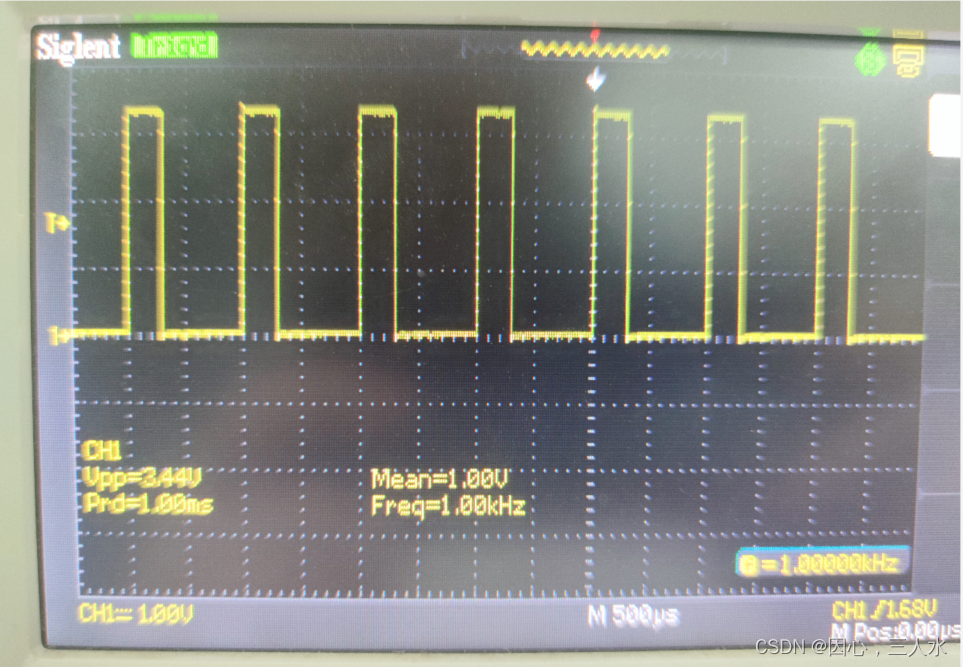
输出周期为1ms,占空比为30%的PWM。
./3_PWM_1 1000 30