FMCW信号
调频连续波(frequency modulated continuous wave,FMCW)顾名思义,就是对信号的频率进行线性调制的信号。
从时域上看,对频率的调制,就像一把连续的锯齿波。其中每一个锯齿叫做一个chirp,其持续的时间叫做chirp的周期(chirp period 或 chirp repetition time);在实际使用中,我们将chirp合并成一帧(frame)进行发送,从而得到物体的速度(或多普勒频偏)信息,是为FMCW信号。
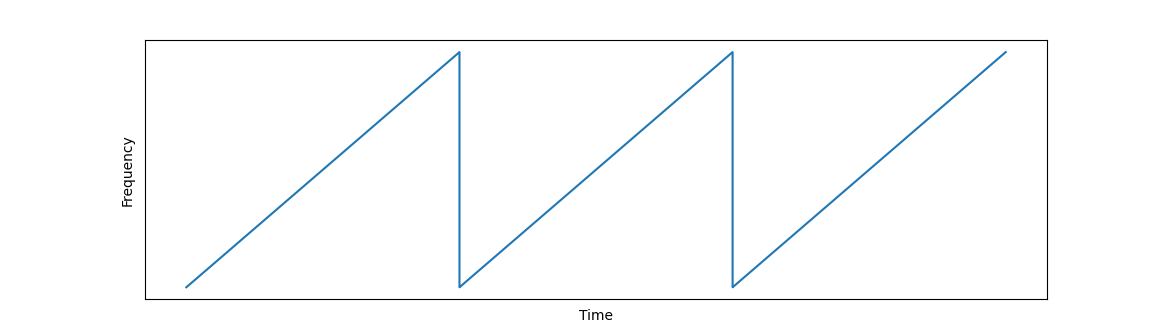
我们定义扫频带宽与chirp周期的比值为系数K,也即锯齿波的斜率(slope)。
K
=
扫频带宽
c
h
i
r
p
周期
=
扫频终止频率
−
扫频起始频率
c
h
i
r
p
周期
K = \frac{扫频带宽}{chirp周期}= \frac{扫频终止频率-扫频起始频率}{chirp周期}
K=chirp周期扫频带宽=chirp周期扫频终止频率−扫频起始频率
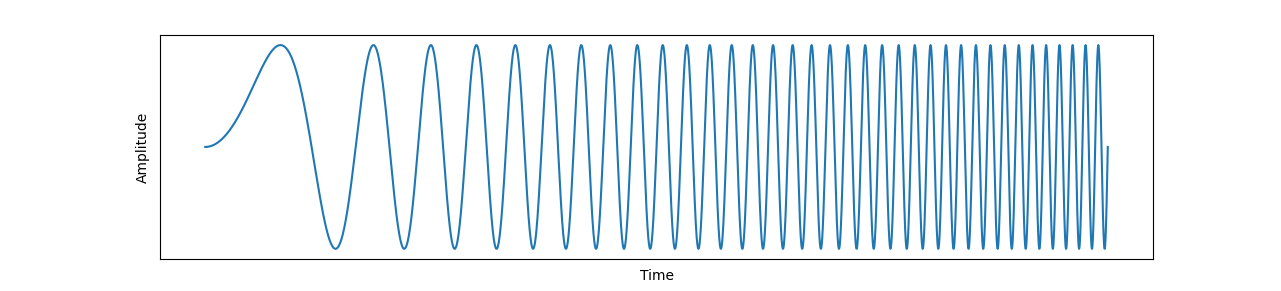
如果从时域上看此时信号幅度的变化,可以发现随着时间的推移,对应正弦波的频率会越来越高,即呈现越来越密的特点。
中频信号
我们采用的IF信号就是指接收的回波信号与原始信号进行混频后,再过低通滤波器得到的低中频信号(或差拍信号,beat signal)。用一个简图来表示就是:
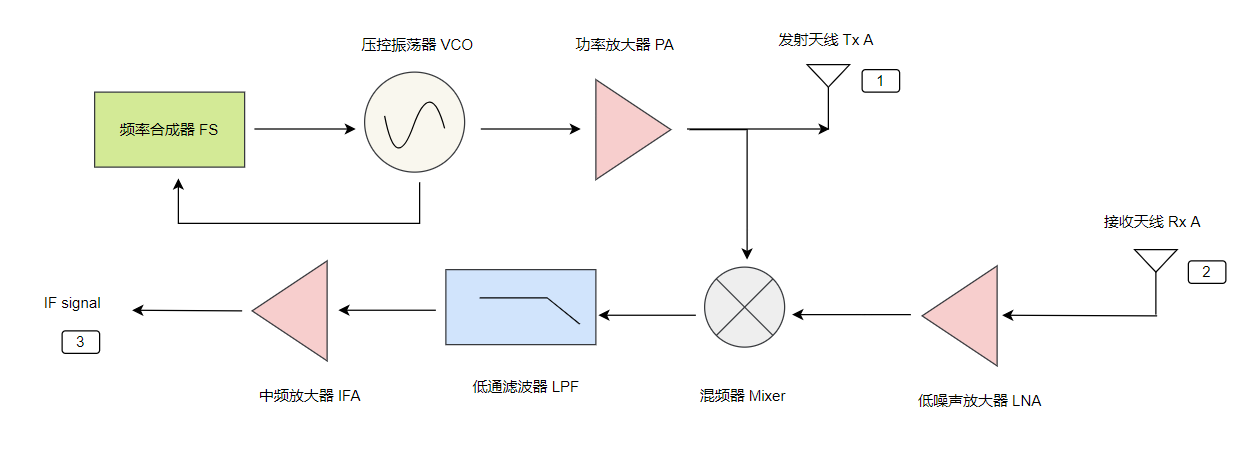
我们只关注1处发射信号、2处接收信号和3处IF信号的表达形式即可。
1处发射信号
由于发送信号为FMCW信号,取其中一个chirp,我们知道相位对时间的导数为角频率(再除以
2
π
2 \pi
2π即频率),如下:
1
2
π
d
ϕ
d
t
=
f
o
+
K
t
\frac{1}{2\pi}\frac{d \phi}{dt} = f_o+Kt
2π1dtdϕ=fo+Kt
于是,我们对上式两边积分,就有:
ϕ
=
2
π
(
f
o
t
+
1
2
K
t
2
)
+
ϕ
o
=
2
π
f
o
t
+
π
K
t
2
+
ϕ
0
\phi = 2\pi( f_ot + \frac{1}{2}Kt^2)+\phi_o = 2\pi f_ot + \pi Kt^2+\phi_0
ϕ=2π(fot+21Kt2)+ϕo=2πfot+πKt2+ϕ0
所以1处发射信号的形式为:
x
T
x
(
t
)
=
A
sin
(
2
π
f
o
t
+
π
K
t
2
+
ϕ
0
)
x_{\tiny{T}x}(t) = A \sin(2 \pi f_ot +\pi Kt^2+\phi_0)
xTx(t)=Asin(2πfot+πKt2+ϕ0)
注意上式为发送的实信号形式(在物理世界中传输的都是实信号),将其转换为复信号(在信号处理中这可由希尔伯特变换实现),即
x r = A e j ( 2 π f o t + π K t 2 + ϕ 0 ) x_r = Ae^{j(2 \pi f_ot +\pi Kt^2+\phi_0)} xr=Aej(2πfot+πKt2+ϕ0)
其中,K为斜率, ϕ o \phi_o ϕo为信号的初始相位, f 0 f_0 f0为中心频率:
f o = 扫频起始频率 + 扫频结束频率 2 f_o =\frac{扫频起始频率+扫频结束频率}{2} fo=2扫频起始频率+扫频结束频率
2处接收信号

发送的信号在遇到目标(Target)后就会反射,从而产生2处接收天线的回波信号,假设这个时延为 τ \tau τ,衰减系数为 a a a,则
x R x ( t ) = a x T x ( t − τ ) = A ′ sin [ 2 π f o ( t − τ ) + π K ( t − τ ) 2 + ϕ 0 ] = A sin [ π K t 2 + 2 π ( f o − K τ ) t + π K τ 2 − 2 π f o τ + ϕ 0 ] x_{\tiny{R}x}(t) = a x_{\tiny{T}x}(t-\tau) = A^{\prime} \sin[2 \pi f_o(t-\tau) +\pi K(t-\tau)^2+\phi_0] \\ =A\sin[\pi K t^2 +2\pi (f_o - K \tau)t+\pi K \tau^2-2 \pi f_o \tau + \phi_0] xRx(t)=axTx(t−τ)=A′sin[2πfo(t−τ)+πK(t−τ)2+ϕ0]=Asin[πKt2+2π(fo−Kτ)t+πKτ2−2πfoτ+ϕ0]
3处IF信号
根据三角公式中的积化和差公式,即:
sin
(
α
)
sin
(
β
)
=
1
2
[
cos
(
α
−
β
)
−
cos
(
α
+
β
)
]
\sin(\alpha) \sin(\beta) = \frac{1}{2}[\cos(\alpha - \beta) - \cos(\alpha + \beta) ]
sin(α)sin(β)=21[cos(α−β)−cos(α+β)]
于是我们混频后的信号为:
x
T
x
(
t
)
×
x
R
x
(
t
)
=
1
2
A
A
′
[
cos
(
2
π
K
τ
t
+
2
π
f
o
τ
−
π
K
τ
2
)
−
cos
(
2
π
(
2
f
o
−
K
τ
)
t
+
.
.
.
)
]
x_{\tiny{T}x}(t) \times x_{\tiny{R}x}(t) =\frac{1}{2}AA^{\prime}[\cos(2\pi K\tau t+2\pi f_o \tau-\pi K \tau^2 ) \\- \cos(2\pi(2 f_o-K \tau)t+...)]
xTx(t)×xRx(t)=21AA′[cos(2πKτt+2πfoτ−πKτ2)−cos(2π(2fo−Kτ)t+...)]
经过低通滤波器后,结果中的和式将作为高频成分被滤除,而只留下差式中低频的成分,我们再将这个差信号通过中频放大器放大,最终将得到3处的中频信号,即:
x I F ( t ) = A ′ ′ cos ( 2 π K τ t + 2 π f o τ − π K τ 2 ) x_{\tiny{IF}}(t) = A^{\prime \prime} \cos(2\pi K\tau t+2\pi f_o \tau-\pi K \tau^2 ) xIF(t)=A′′cos(2πKτt+2πfoτ−πKτ2)
我们再对上面的参数有一个感性的认识:由于电磁波以光速运动,在前方1m处的目标其时延
τ
\tau
τ的量级大致在
1
0
−
8
10^{-8}
10−8,
f
0
f_0
f0对于毫米波雷达在
1
0
9
10^9
109量级,而一般的 K 大概是1GHz除以0.1ms级别,即
1
0
−
13
10^{-13}
10−13级。比较两个附加相位:
f
o
τ
≈
10
K
τ
2
≈
1
0
−
3
f_o \tau \approx 10 \ \ \ K\tau ^2 \approx 10^{-3}
foτ≈10 Kτ2≈10−3
所以最后一项的附加相位几乎可以忽略不计,即一般将中频信号的形式写为:
x I F ( t ) = A ′ ′ cos ( 2 π K τ t + 2 π f o τ ) x_{\tiny{IF}}(t) = A^{\prime \prime} \cos(2\pi K\tau t+2\pi f_o \tau ) xIF(t)=A′′cos(2πKτt+2πfoτ)
上式即为本文最终要得出的式子。