视觉SLAM十四讲ch4 李群和李代数
- 视觉SLAM十四讲ch4 李群和李代数
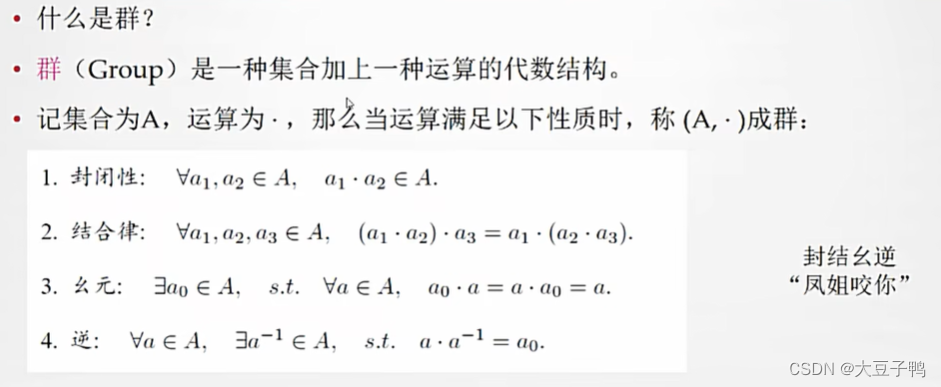
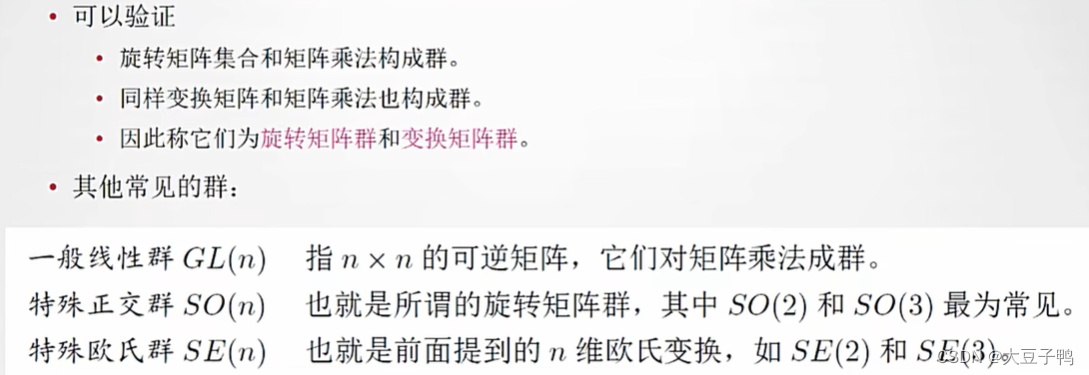
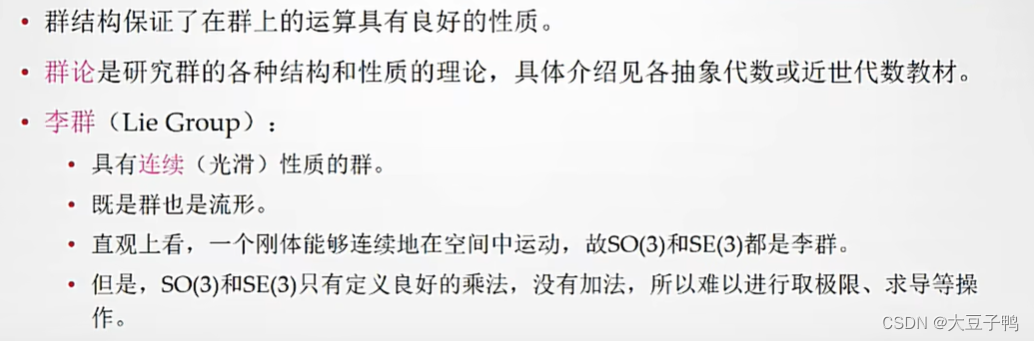
- 李群和李代数基础
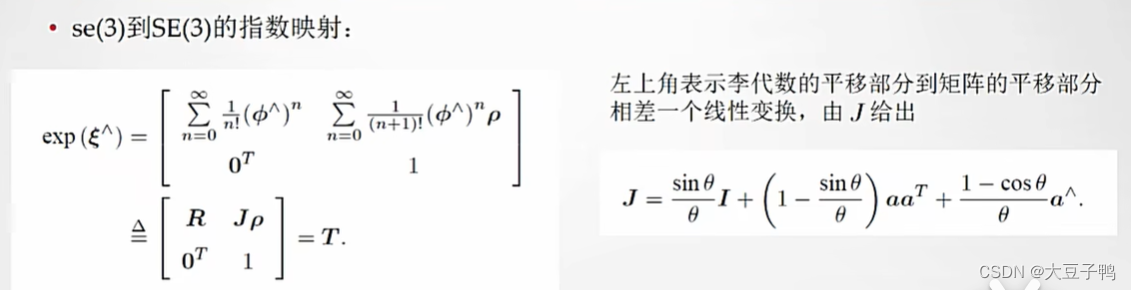
- 指数映射与对数映射
- 李代数求导与扰动模型
视觉SLAM十四讲ch4 李群和李代数
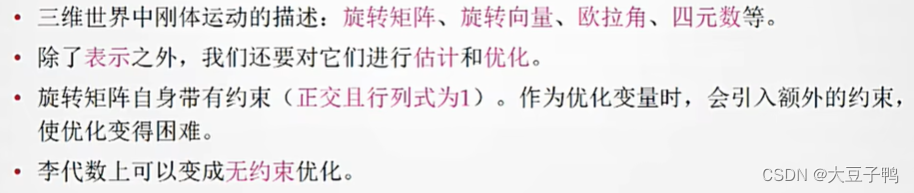
李群和李代数基础
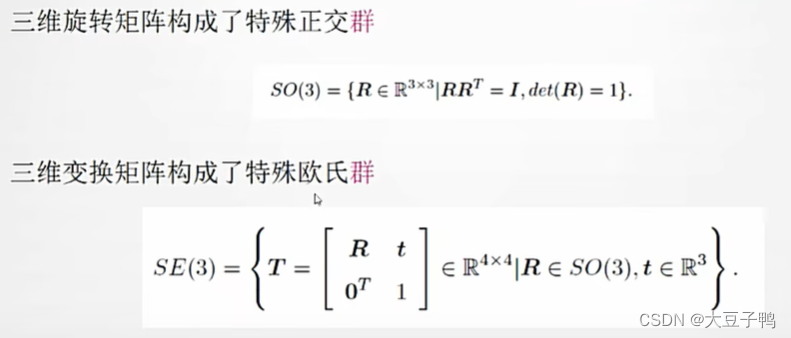
可以将SO3看成旋转矩阵集合,SE3看成变换矩阵集合
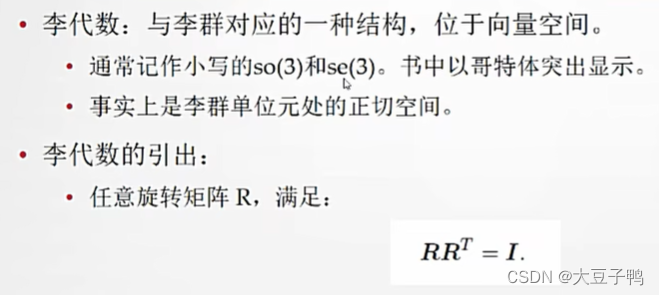


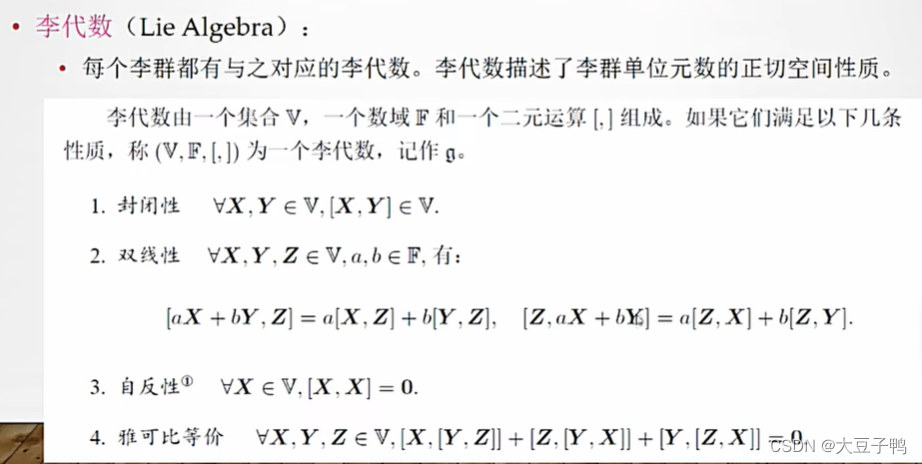
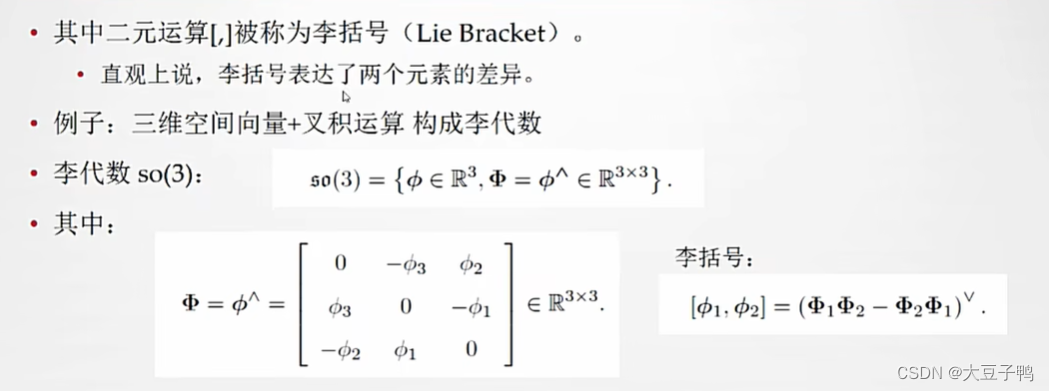

李代数是6个自由度的向量空间R6,包含3个平移分量p和3个旋转分量o 。
小的so3是一个三维的空间,小的se3是一个六维的空间,
小的so3是一个3×3的矩阵,小的se3是一个4×4的矩阵。
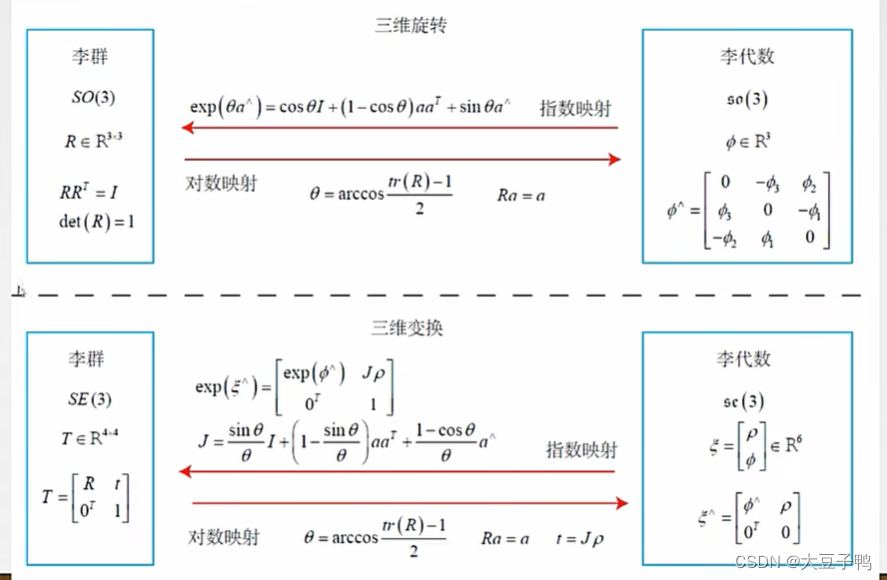
指数映射与对数映射
引言:李群和李代数是一个一一对应的关系。
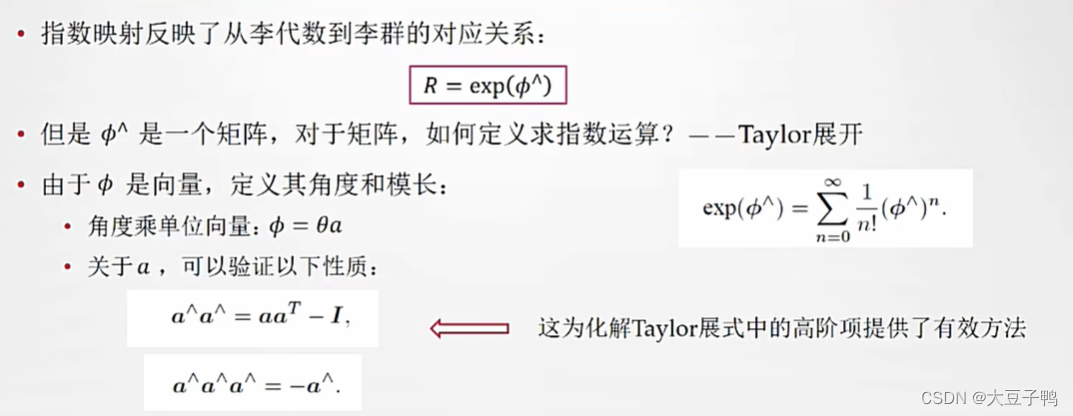
θ 是角度,a是单位向量
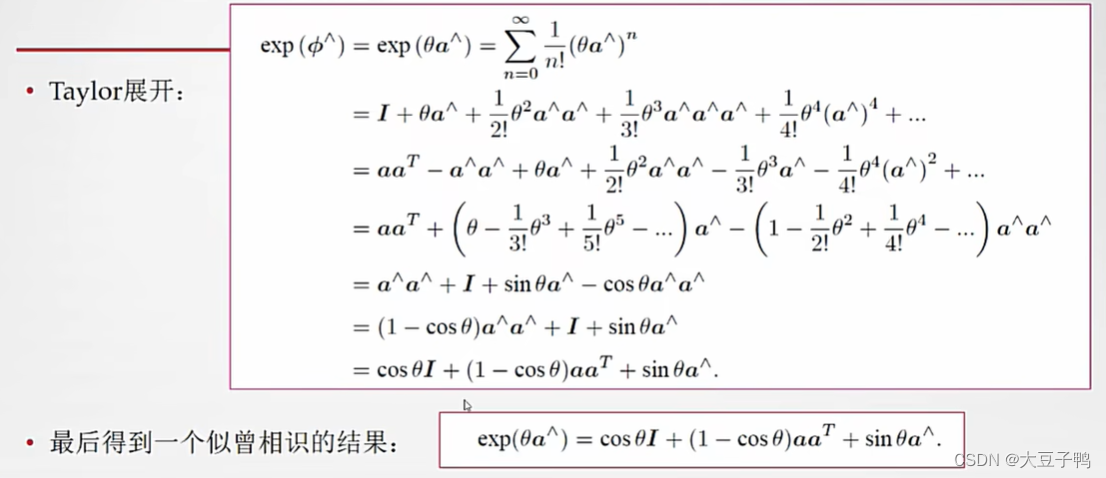
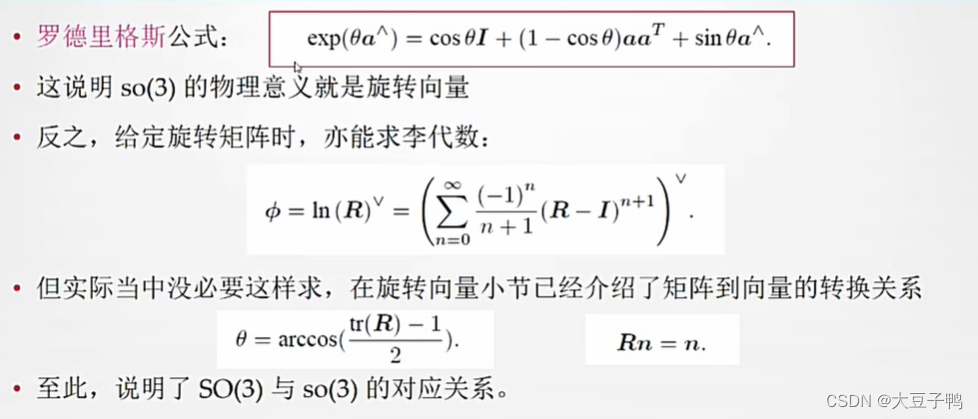
罗德里格斯公式:如何把一个旋转向量转化成一个旋转矩阵时候
小的so3是李代数到大的SO3李群之间元素对应。
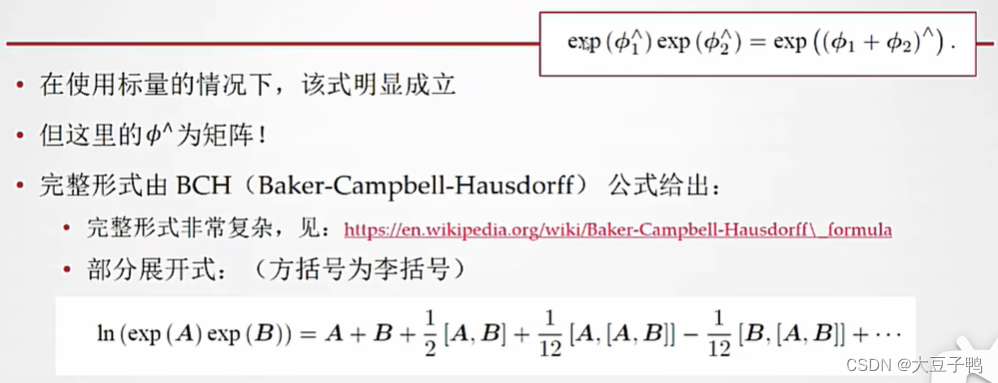
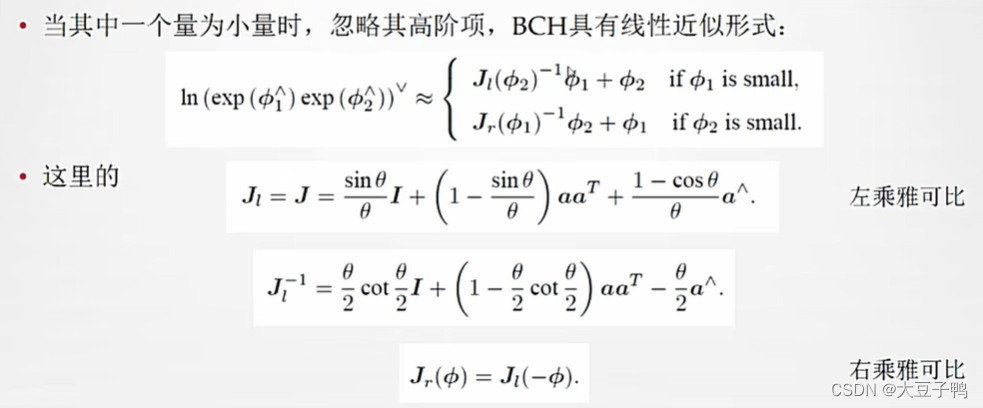
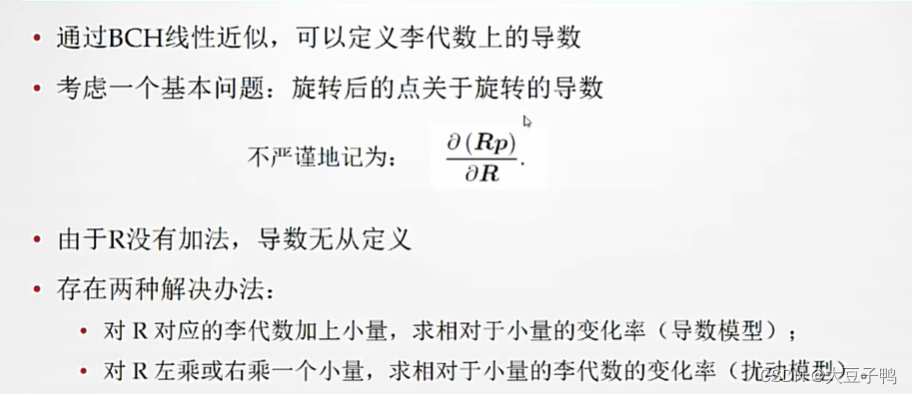
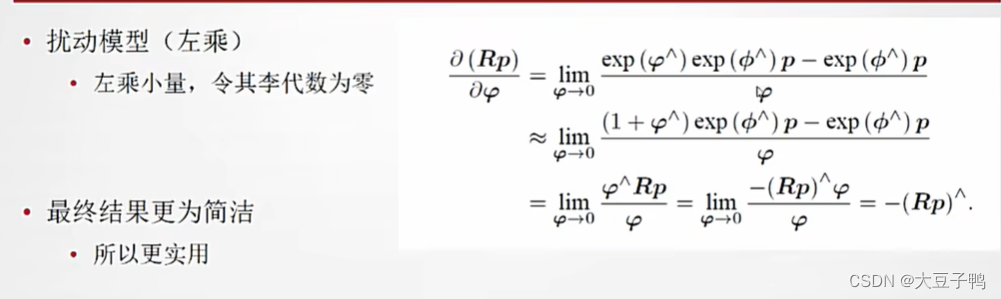
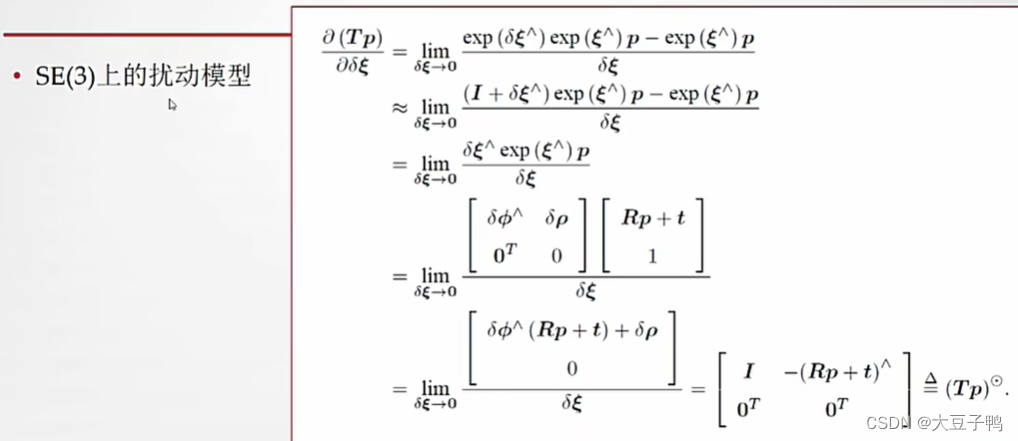
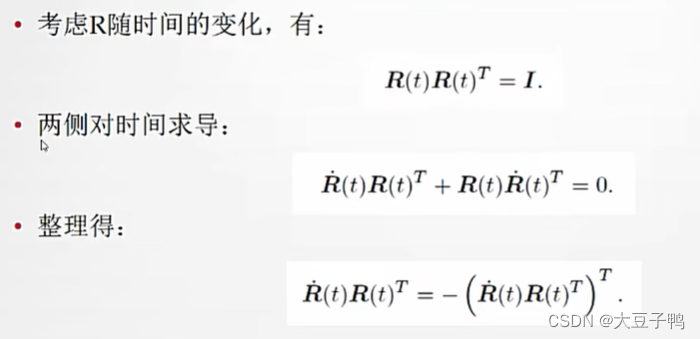
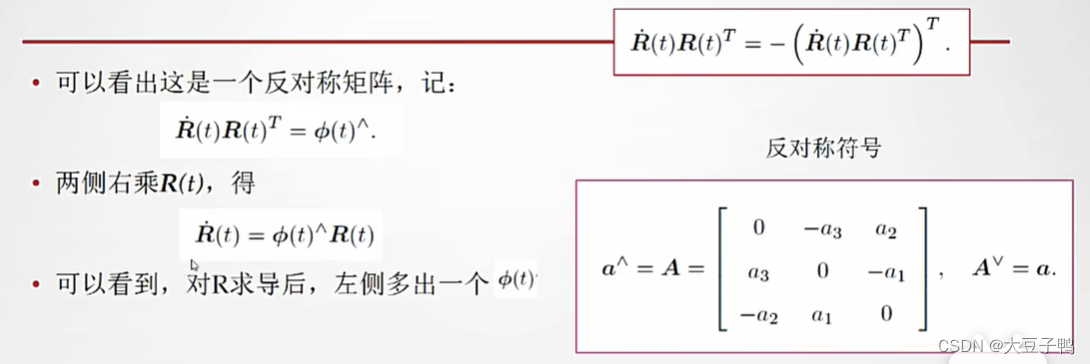
李代数求导与扰动模型
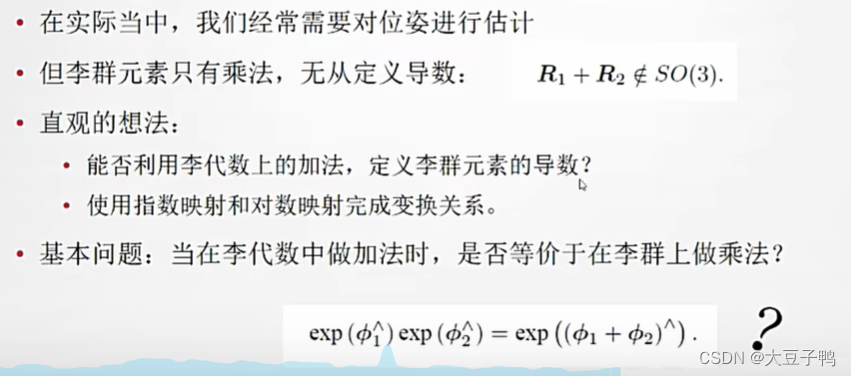
标量的时候,该等式成立,但是为矩阵,该等式不成立