小梅哥串口部分学习part2
- 串口通信接收原理
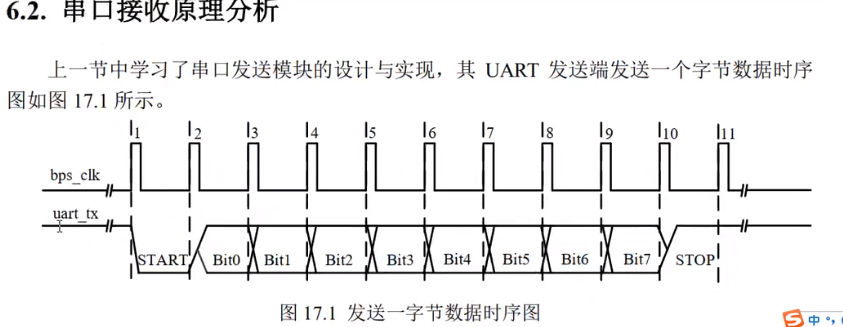
- 串口通信接收程序设计与调试
- 巧用位操作优化串口接收逻辑设计
- 串口接收模块的项目应用案例
串口通信接收原理
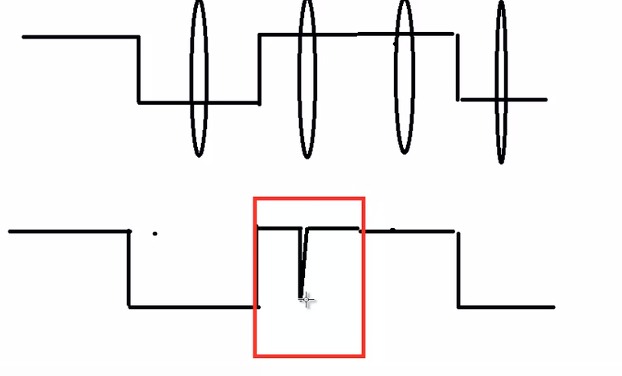
在采样的时候没有必要一直判断一个clk内全部都是高/低电平,如果采用直接对中间点进行判断的话,很有可能出现中间点恰好电力失常等等,因此可以采集多次样本,其中样本数据频率高的值就是该段电平的值
**基本原理:**采样
**技巧是:**一位数据采多次,统计得到高电平出现的次数,次数多的就是该位的电平值。采样8次,0,1,2,3低电平,4,5,6,7为高电平
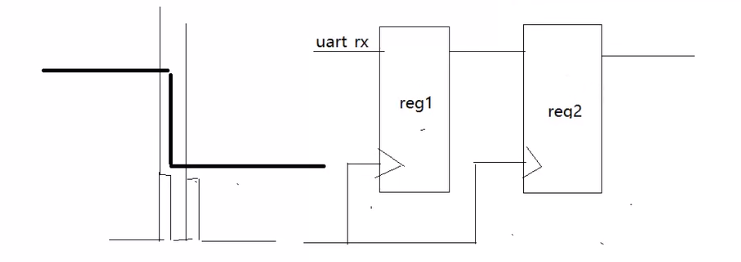
**起始位检测:**通过边沿检测电路
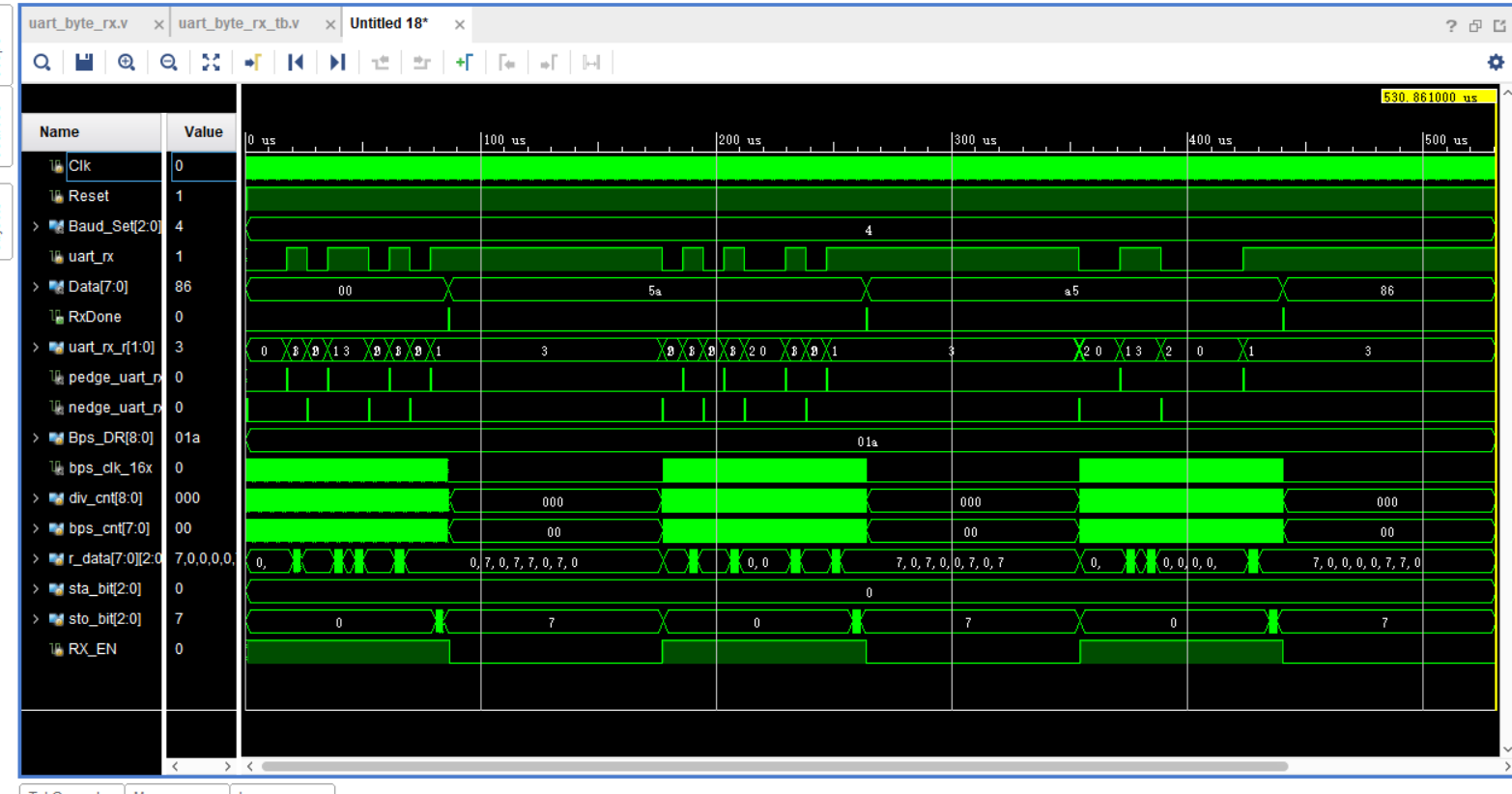
串口通信接收程序设计与调试
波特率是指串口通信中,单位时间传输的二进制位数eg:115200对应的就是1s传输115200位,即传输一位需要1000000000/115200,若进行采样频率为波特率的16倍则需要再除以16对应于每次的采样的时间,由于内部时钟20ns的频率进行变化,所以想要计算对应的采样次数就需要再除以20~
源代码
module uart_byte_rx(
input Clk,
input Reset,
input [2:0]Baud_Set,
input uart_rx,
output reg[7:0] Data,
output reg RxDone
);
//边沿检测
reg [1:0]uart_rx_r;
always@(posedge Clk)
begin
uart_rx_r[0]<=uart_rx;
uart_rx_r[1]<=uart_rx_r[0];
end
//上升沿
wire pedge_uart_rx;
//assign pedge_uart_rx=((uart_rx_r[0]==0)&&(uart_rx_r[1]==1));
assign pedge_uart_rx=(uart_rx_r==2'b01);
//下降沿
wire nedge_uart_rx;
//assign pedge_uart_rx=((uart_rx_r[0]==1)&&(uart_rx_r[1]==0));
assign nedge_uart_rx=(uart_rx_r==2'b10);
//采样需要计数的位数
reg [8:0] Bps_DR;
always@(*)
case(Baud_Set)
0:Bps_DR = 1000000000/9600/16/20 - 1;
1:Bps_DR = 1000000000/19200/16/20 - 1;
2:Bps_DR = 1000000000/38400/16/20 - 1;
3:Bps_DR = 1000000000/57600/16/20 - 1;
4:Bps_DR = 1000000000/115200/16/20 - 1;
default:Bps_DR = 1000000000/9600/16/20 - 1;
endcase
wire bps_clk_16x;
assign bps_clk_16x = (div_cnt == Bps_DR / 2);
reg [8:0]div_cnt;
always@(posedge Clk or negedge Reset)begin
if(!Reset)
div_cnt<=0;
else if(RX_EN)begin
if(div_cnt==Bps_DR)
div_cnt<=0;
else
div_cnt<=div_cnt+1;
end
else
div_cnt<=0;
end
//每位被分成16次频率采样,所以一共检测10位则需要160位
reg [7:0]bps_cnt;
always@(posedge Clk or negedge Reset)begin
if(!Reset)
bps_cnt<=0;
else if(RX_EN)begin
if(bps_clk_16x)begin
if(bps_cnt==159)
bps_cnt<=0;
else
bps_cnt<=bps_cnt+1;
end
else
bps_cnt<=bps_cnt;
end
else
bps_cnt<=0;
end
reg[2:0]r_data[7:0];
reg [2:0]sta_bit;
reg [2:0]sto_bit;
reg RX_EN;
always@(posedge Clk or negedge Reset)begin
if(!Reset)
RX_EN<=0;
else if(nedge_uart_rx)
RX_EN<=1;
else if(RxDone || (sta_bit >= 4))
RX_EN<=0;
end
//用于对数据赋值
always@(posedge Clk or negedge Reset)begin
if(!Reset)begin
sta_bit<=0;
sto_bit<=0;
r_data[0]<=0;
r_data[1]<=0;
r_data[2]<=0;
r_data[3]<=0;
r_data[4]<=0;
r_data[5]<=0;
r_data[6]<=0;
r_data[7]<=0;
end
else if(bps_clk_16x)//中间位置取结果16次里面的5,6,7,8,9,10,11次数据
begin
case(bps_cnt)
0:begin
sta_bit<=0;
sto_bit<=0;
r_data[0]<=0;
r_data[1]<=0;
r_data[2]<=0;
r_data[3]<=0;
r_data[4]<=0;
r_data[5]<=0;
r_data[6]<=0;
r_data[7]<=0;
end
5,6,7,8,9,10,11:sta_bit<=sta_bit+uart_rx;
21,22,23,24,25,26,27: r_data[0] <= r_data[0] + uart_rx;
37,38,39,40,41,42,43: r_data[1] <= r_data[1] + uart_rx;
53,54,55,56,57,58,59: r_data[2] <= r_data[2] + uart_rx;
69,70,71,72,73,74,75: r_data[3] <= r_data[3] + uart_rx;
85,86,87,88,89,90,91: r_data[4] <= r_data[4] + uart_rx;
101,102,103,104,105,106,107: r_data[5] <= r_data[5] + uart_rx;
117,118,119,120,121,122,123: r_data[6] <= r_data[6] + uart_rx;
133,134,135,136,137,138,139: r_data[7] <= r_data[7] + uart_rx;
149,150,151,152,153,154,155: sto_bit <= sto_bit + uart_rx;
default:;
endcase
end
end
always@(posedge Clk or negedge Reset)
if(!Reset)
Data <= 0;
else if(bps_clk_16x && (bps_cnt == 159))begin
Data[0] <= (r_data[0] >= 4)?1'b1:1'b0;
Data[1] <= (r_data[1] >= 4)?1'b1:1'b0;
Data[2] <= (r_data[2] >= 4)?1'b1:1'b0;
Data[3] <= (r_data[3] >= 4)?1'b1:1'b0;
Data[4] <= (r_data[4] >= 4)?1'b1:1'b0;
Data[5] <= (r_data[5] >= 4)?1'b1:1'b0;
Data[6] <= (r_data[6] >= 4)?1'b1:1'b0;
Data[7] <= (r_data[7] >= 4)?1'b1:1'b0;
end
always@(posedge Clk or negedge Reset)begin
if(!Reset)
RxDone<=0;
else if((div_cnt==Bps_DR/2)&&(bps_cnt==159))
RxDone<=1;
else
RxDone<=0;
end
endmodule
测试模块
`timescale 1ns / 1ns
module uart_byte_rx_tb(
);
reg Clk;
reg Reset;
wire [2:0]Baud_Set;
reg uart_rx;
wire[7:0] Data;
wire RxDone;
assign Baud_Set=4;
uart_byte_rx uart_byte_rx(
Clk,
Reset,
Baud_Set,
uart_rx,
Data,
RxDone
);
initial Clk=0;
always #10 Clk=!Clk;
initial begin
Reset=0;
uart_rx=1;
#201;
// Reset=1;
// uart_tx_byte(8'h54);
// @(posedge RxDone);
// #50000;
// uart_tx_byte(8'h32);
// @(posedge RxDone);
// #50000;
// uart_tx_byte(8'h89);
// @(posedge RxDone);
// #50000;
Reset = 1;
#200;
uart_tx_byte(8'h5a);
#90000;
uart_tx_byte(8'ha5);
#90000;
uart_tx_byte(8'h86);
#90000;
$stop;
$stop;
end
task uart_tx_byte;
input [7:0]tx_data;
begin
uart_rx=1;
#20;
uart_rx=0;
#8680;
uart_rx=tx_data[0];
#8680;
uart_rx=tx_data[1];
#8680;
uart_rx=tx_data[2];
#8680;
uart_rx=tx_data[3];
#8680;
uart_rx=tx_data[4];
#8680;
uart_rx=tx_data[5];
#8680;
uart_rx=tx_data[6];
#8680;
uart_rx=tx_data[7];
#8680;
uart_rx=1;
#8680;
end
endtask
endmodule
仿真截图
巧用位操作优化串口接收逻辑设计
解释:3’b000 3’b001 3’b010 3’b011 3’b100 3’b101 3’b110 3’b111判断是否大于等于4可以直接对第2位进行判断,为1则大于等于,为0则不大于
always@(posedge Clk or negedge Reset)
if(!Reset)
Data <= 0;
else if(bps_clk_16x && (bps_cnt == 159))begin
Data[0] <= (r_data[0] >= 4)?1'b1:1'b0;
Data[1] <= (r_data[1] >= 4)?1'b1:1'b0;
Data[2] <= (r_data[2] >= 4)?1'b1:1'b0;
Data[3] <= (r_data[3] >= 4)?1'b1:1'b0;
Data[4] <= (r_data[4] >= 4)?1'b1:1'b0;
Data[5] <= (r_data[5] >= 4)?1'b1:1'b0;
Data[6] <= (r_data[6] >= 4)?1'b1:1'b0;
Data[7] <= (r_data[7] >= 4)?1'b1:1'b0;
end
//可以达到和上面同样的功能
// always@(posedge Clk or negedge Reset)
// if(!Reset)
// Data <= 0;
// else if(bps_clk_16x && (bps_cnt == 159))begin
// Data[0] <= r_data[0][2];
// Data[1] <= r_data[1][2];
// Data[2] <= r_data[2][2];
// Data[3] <= r_data[3][2];
// Data[4] <= r_data[4][2];
// Data[5] <= r_data[5][2];
// Data[6] <= r_data[6][2];
// Data[7] <= r_data[7][2];
// end
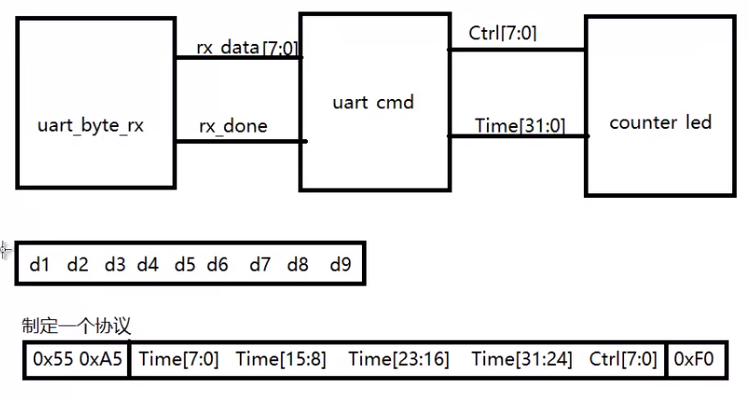
串口接收模块的项目应用案例
使用串口来控制LED工作状态
题目:使用串口发送指令到FPGA开发板,来控制第7课第4个实验的开发板上的LED灯的工作状态
让LED灯按照指定的亮灭模式亮灭,亮灭模式未知,由用户随机指定。8个变化状态为一个循环,每个变化状态的时间值可以根据不同的应用场景选择
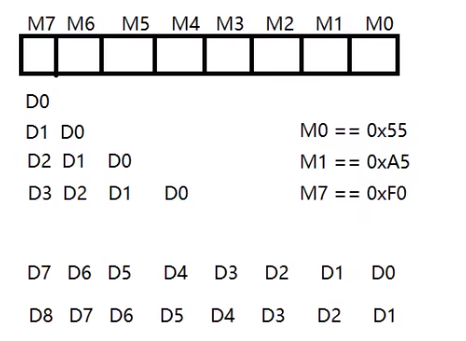
如何使用串口接收8个字节的数据
收获:
1:上板调试时,对于时钟计时问题,最初counter=0,发现不满足,counter就会一直自加,直到加到32位的’hFFFFFFFF’才会清零
在实际板级运行的时候,当我们的time值更新时(25000000),counter的值已经大于该值,所以无法通过计数比较的方式清零,只能一直自加下去,直到32位计满了,溢出清零,然后才能正常的循环计数清零
这里涉及到一种编写技巧判断
if(i>=32)
a=0;
和if(i==32)
a=0;
虽然结界点都是32,但是对于第一种情况可以有效地避免当不满足条件时的及时清零,对于第二种有的时候或许会有些小问题
2:对于reset这种外部模块最好全部都定义成大写,并且统一这样赋值的时候不容易出错,模块内部的变量定义成小写
3:在顶层模块中几乎除了输入输出以外的内部变量都要定义成wire类型,代表内部的连线,输入输出还是采用和以往相同的方法,若底层是reg型,则上层直接定义成output就可,不用再定义成reg,测试文件直接写出wire~
//counter_led_4中
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
counter <= 0;
else if(counter >= Time - 1)//这里由==改成了>=
counter <= 0;
else
counter <= counter + 1'b1;
源代码
module uart_rx_ctrl_led(
input Clk,
input reset,
input uart_rx,
output Led
);
wire [7:0]Ctrl;
wire [31:0]Time;
wire [7:0]Data;
wire RxDone;
counter_led_4 counter_led_4(
.Clk(Clk),
.Reset_n(reset),
.Ctrl(Ctrl),
.Time(Time),
.Led(Led)
);
uart_byte_rx uart_byte_rx(
.Clk(Clk),
.Reset(reset),
.Baud_Set(3'd4),
.uart_rx(uart_rx),
.Data(Data),
.RxDone(RxDone)
);
uart_cmd uart_cmd(
.clk(Clk),
.reset(reset),
.rx_data(Data),
.rx_done(RxDone),
.ctrl(Ctrl),
.time_set(Time)
);
endmodule
module counter_led_4(
Clk,
Reset_n,
Ctrl,
Time,
Led
);
input Clk;
input Reset_n;
input [7:0]Ctrl;
input [31:0]Time;
output reg Led;
reg [31:0]counter;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
counter <= 0;
else if(counter >= Time - 1)
counter <= 0;
else
counter <= counter + 1'b1;
reg [2:0]counter2;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
counter2 <= 0;
else if(counter == Time - 1)
counter2 <= counter2 + 1'b1;
always@(posedge Clk or negedge Reset_n)
if(!Reset_n)
Led <= 0;
else case(counter2)
0:Led <= Ctrl[0];
1:Led <= Ctrl[1];
2:Led <= Ctrl[2];
3:Led <= Ctrl[3];
4:Led <= Ctrl[4];
5:Led <= Ctrl[5];
6:Led <= Ctrl[6];
7:Led <= Ctrl[7];
default:Led <= Led;
endcase
endmodule
module uart_byte_rx(
input Clk,
input Reset,
input [2:0]Baud_Set,
input uart_rx,
output reg[7:0] Data,
output reg RxDone
);
//边沿检测
reg [1:0]uart_rx_r;
always@(posedge Clk)
begin
uart_rx_r[0]<=uart_rx;
uart_rx_r[1]<=uart_rx_r[0];
end
//上升沿
wire pedge_uart_rx;
//assign pedge_uart_rx=((uart_rx_r[0]==0)&&(uart_rx_r[1]==1));
assign pedge_uart_rx=(uart_rx_r==2'b01);
//下降沿
wire nedge_uart_rx;
//assign pedge_uart_rx=((uart_rx_r[0]==1)&&(uart_rx_r[1]==0));
assign nedge_uart_rx=(uart_rx_r==2'b10);
//采样需要计数的位数
reg [8:0] Bps_DR;
always@(*)
case(Baud_Set)
0:Bps_DR = 1000000000/9600/16/20 - 1;
1:Bps_DR = 1000000000/19200/16/20 - 1;
2:Bps_DR = 1000000000/38400/16/20 - 1;
3:Bps_DR = 1000000000/57600/16/20 - 1;
4:Bps_DR = 1000000000/115200/16/20 - 1;
default:Bps_DR = 1000000000/9600/16/20 - 1;
endcase
wire bps_clk_16x;
assign bps_clk_16x = (div_cnt == Bps_DR / 2);
reg [8:0]div_cnt;
always@(posedge Clk or negedge Reset)begin
if(!Reset)
div_cnt<=0;
else if(RX_EN)begin
if(div_cnt==Bps_DR)
div_cnt<=0;
else
div_cnt<=div_cnt+1;
end
else
div_cnt<=0;
end
//每位被分成16次频率采样,所以一共检测10位则需要160位
reg [7:0]bps_cnt;
always@(posedge Clk or negedge Reset)begin
if(!Reset)
bps_cnt<=0;
else if(RX_EN)begin
if(bps_clk_16x)begin
if(bps_cnt==159)
bps_cnt<=0;
else
bps_cnt<=bps_cnt+1;
end
else
bps_cnt<=bps_cnt;
end
else
bps_cnt<=0;
end
reg[2:0]r_data[7:0];
reg [2:0]sta_bit;
reg [2:0]sto_bit;
reg RX_EN;
always@(posedge Clk or negedge Reset)begin
if(!Reset)
RX_EN<=0;
else if(nedge_uart_rx)
RX_EN<=1;
else if(RxDone || (sta_bit >= 4))
RX_EN<=0;
end
//用于对数据赋值
always@(posedge Clk or negedge Reset)begin
if(!Reset)begin
sta_bit<=0;
sto_bit<=0;
r_data[0]<=0;
r_data[1]<=0;
r_data[2]<=0;
r_data[3]<=0;
r_data[4]<=0;
r_data[5]<=0;
r_data[6]<=0;
r_data[7]<=0;
end
else if(bps_clk_16x)//中间位置取结果16次里面的5,6,7,8,9,10,11次数据
begin
case(bps_cnt)
0:begin
sta_bit<=0;
sto_bit<=0;
r_data[0]<=0;
r_data[1]<=0;
r_data[2]<=0;
r_data[3]<=0;
r_data[4]<=0;
r_data[5]<=0;
r_data[6]<=0;
r_data[7]<=0;
end
5,6,7,8,9,10,11:sta_bit<=sta_bit+uart_rx;
21,22,23,24,25,26,27: r_data[0] <= r_data[0] + uart_rx;
37,38,39,40,41,42,43: r_data[1] <= r_data[1] + uart_rx;
53,54,55,56,57,58,59: r_data[2] <= r_data[2] + uart_rx;
69,70,71,72,73,74,75: r_data[3] <= r_data[3] + uart_rx;
85,86,87,88,89,90,91: r_data[4] <= r_data[4] + uart_rx;
101,102,103,104,105,106,107: r_data[5] <= r_data[5] + uart_rx;
117,118,119,120,121,122,123: r_data[6] <= r_data[6] + uart_rx;
133,134,135,136,137,138,139: r_data[7] <= r_data[7] + uart_rx;
149,150,151,152,153,154,155: sto_bit <= sto_bit + uart_rx;
default:;
endcase
end
end
always@(posedge Clk or negedge Reset)
if(!Reset)
Data <= 0;
else if(bps_clk_16x && (bps_cnt == 159))begin
Data[0] <= (r_data[0] >= 4)?1'b1:1'b0;
Data[1] <= (r_data[1] >= 4)?1'b1:1'b0;
Data[2] <= (r_data[2] >= 4)?1'b1:1'b0;
Data[3] <= (r_data[3] >= 4)?1'b1:1'b0;
Data[4] <= (r_data[4] >= 4)?1'b1:1'b0;
Data[5] <= (r_data[5] >= 4)?1'b1:1'b0;
Data[6] <= (r_data[6] >= 4)?1'b1:1'b0;
Data[7] <= (r_data[7] >= 4)?1'b1:1'b0;
end
//可以达到和上面同样的功能
// always@(posedge Clk or negedge Reset)
// if(!Reset)
// Data <= 0;
// else if(bps_clk_16x && (bps_cnt == 159))begin
// Data[0] <= r_data[0][2];
// Data[1] <= r_data[1][2];
// Data[2] <= r_data[2][2];
// Data[3] <= r_data[3][2];
// Data[4] <= r_data[4][2];
// Data[5] <= r_data[5][2];
// Data[6] <= r_data[6][2];
// Data[7] <= r_data[7][2];
// end
always@(posedge Clk or negedge Reset)begin
if(!Reset)
RxDone<=0;
else if((div_cnt == Bps_DR/2)&&(bps_cnt==159))
RxDone<=1;
else
RxDone<=0;
end
endmodule
//这里养成一个习惯,在模块内部的信号用小写
module uart_cmd(
input clk,
input reset,
input [7:0]rx_data,
input rx_done,
output reg [7:0]ctrl,
output reg [31:0]time_set
);
reg [7:0] reg_data[7:0];
always@(posedge clk)begin
if(rx_done)begin
reg_data[7]<=rx_data;
reg_data[6]<=reg_data[7];
reg_data[5]<=reg_data[6];
reg_data[4]<=reg_data[5];
reg_data[3]<=reg_data[4];
reg_data[2]<=reg_data[3];
reg_data[1]<=reg_data[2];
reg_data[0]<=reg_data[1];
end
end
reg rx_rx_done;
always@(posedge clk)
rx_rx_done<=rx_done;
always@(posedge clk or negedge reset)begin
if(!reset)begin
time_set<=0;
ctrl<=0;
end
else if(rx_rx_done)begin
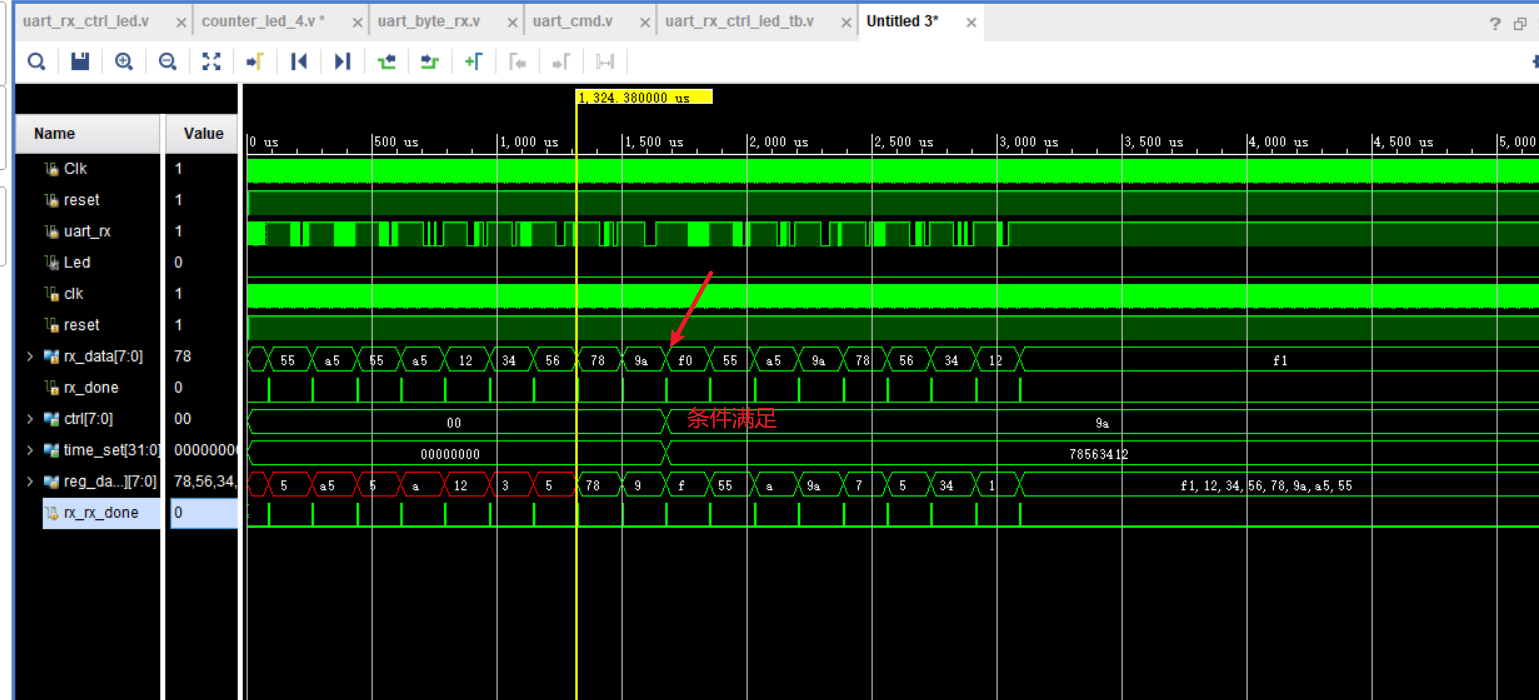
if((reg_data[0]==8'h55)&&(reg_data[1]==8'ha5)&&(reg_data[7]==8'hf0))begin
time_set[7:0]<=reg_data[2];
time_set[15:8]<=reg_data[3];
time_set[23:16]<=reg_data[4];
time_set[31:24]<=reg_data[5];
ctrl<=reg_data[6];
end
end
end
endmodule
测试文件
`timescale 1ns / 1ps
module uart_rx_ctrl_led_tb(
);
reg Clk;
reg reset;
reg uart_rx;
wire Led;
uart_rx_ctrl_led uart_rx_ctrl_led(
Clk,
reset,
uart_rx,
Led
);
initial Clk = 1;
always#10 Clk = ~Clk;
initial begin
reset = 0;
uart_rx = 1;
#201;
reset = 1;
#200;
uart_tx_byte(8'h55);
#90000;
uart_tx_byte(8'ha5);
#90000;
uart_tx_byte(8'h55);
#90000;
uart_tx_byte(8'ha5);
#90000;
uart_tx_byte(8'h12);
#90000;
uart_tx_byte(8'h34);
#90000;
uart_tx_byte(8'h56);
#90000;
uart_tx_byte(8'h78);
#90000;
uart_tx_byte(8'h9a);
#90000;
uart_tx_byte(8'hf0);
#90000;
uart_tx_byte(8'h55);
#90000;
uart_tx_byte(8'ha5);
#90000;
uart_tx_byte(8'h9a);
#90000;
uart_tx_byte(8'h78);
#90000;
uart_tx_byte(8'h56);
#90000;
uart_tx_byte(8'h34);
#90000;
uart_tx_byte(8'h12);
#90000;
uart_tx_byte(8'hf1);
#90000;
$stop;
end
task uart_tx_byte;
input [7:0]tx_data;
begin
uart_rx = 1;
#20;
uart_rx = 0;
#8680;
uart_rx = tx_data[0];
#8680;
uart_rx = tx_data[1];
#8680;
uart_rx = tx_data[2];
#8680;
uart_rx = tx_data[3];
#8680;
uart_rx = tx_data[4];
#8680;
uart_rx = tx_data[5];
#8680;
uart_rx = tx_data[6];
#8680;
uart_rx = tx_data[7];
#8680;
uart_rx = 1;
#8680;
end
endtask
endmodule
仿真截图