文章目录
- 一、通用定时器知识回顾
- 1.1 时钟的选择
- 1.2 内部时钟的选择
- 1.3 计数器模式
- 二、常用寄存器和库函数配置
- 2.1 计数器当前值寄存器CNT
- 2.2 预分频寄存器TIMx_PSC
- 2.3 自动重装载寄存器(TIMx_ARR)
- 2.4 控制寄存器1(TIMx_CR1)
- 2.5 DMA中断使能寄存器(TIMx_DIER)
- 2.6 定时器参数初始化
- 2.7 定时器使能函数
- 2.8 定时器中断使能函数
- 2.9 状态标志位获取和清除
- 三、手把手写定时器中断实验
- 3.1 步骤
- 3.2 程序要求
- 3.3 timer.c
一、通用定时器知识回顾
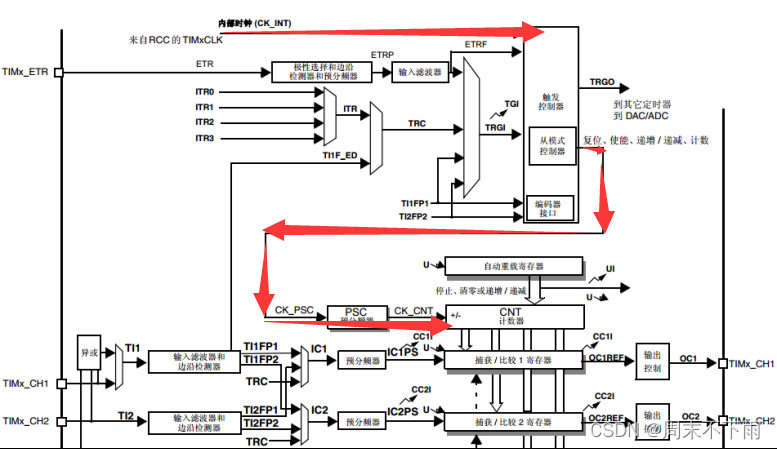
1.1 时钟的选择
计数器时钟可以由下列时钟源提供:(这里,我们选第一个)
①内部时钟(CK_INT)
②外部时钟模式1:外部输入脚(TIx)
③外部时钟模式2:外部触发输入(ETR)(仅适用TIM2,3,4)
④内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器,如可以配置一个定时器Timer1而作为另一个定时器Timer2的预分频器。
1.2 内部时钟的选择
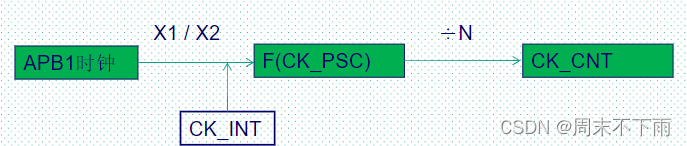
如果APB1的分频系数不是1,则通用定时器的时钟等于APB1时钟的2倍。
如果APB1的分频系数是1,则通用定时器的时钟等于APB1时钟。
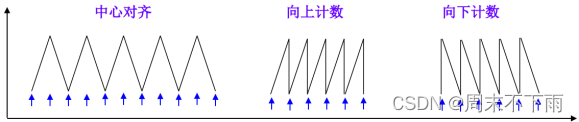
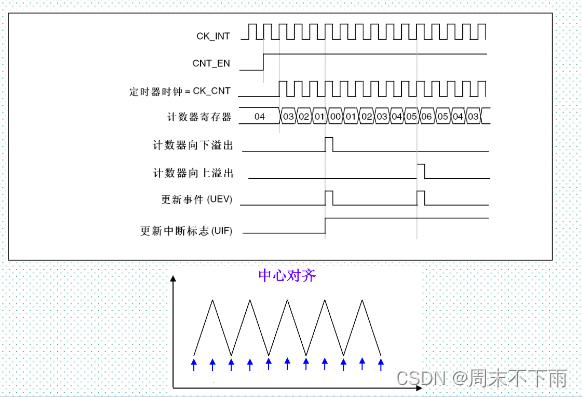
1.3 计数器模式
通用定时器可以向上计数、向下计数、向上向下双向计数模式。
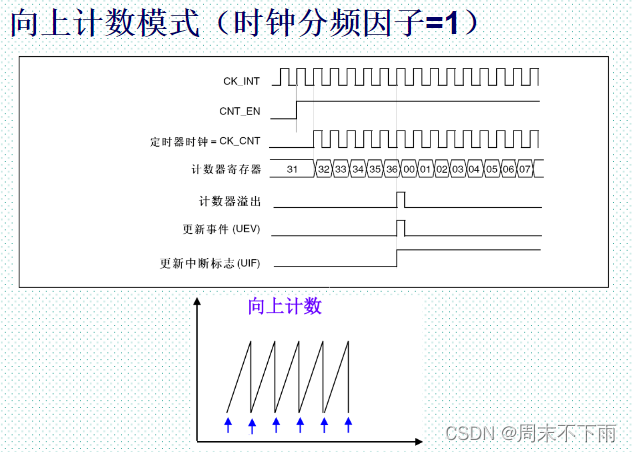
①向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
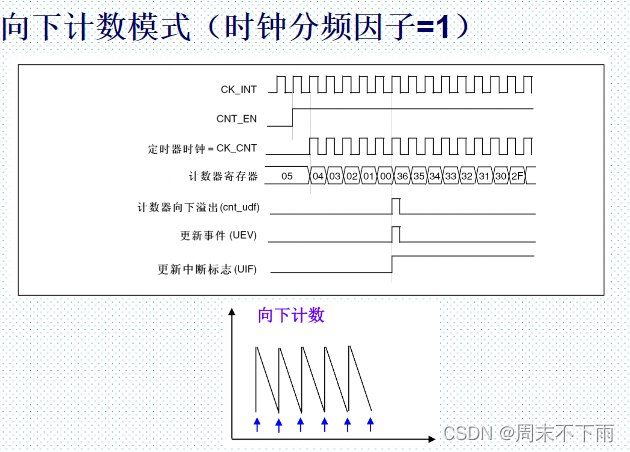
②向下计数模式:计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
③中央对齐模式(向上/向下计数):计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。
二、常用寄存器和库函数配置
2.1 计数器当前值寄存器CNT
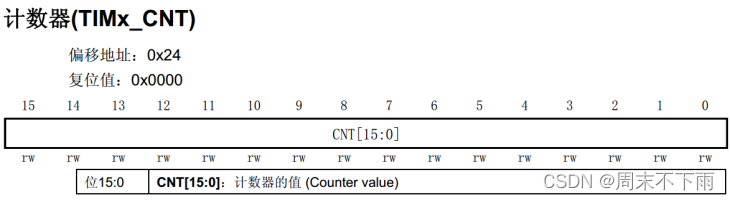
对数值进行加减
2.2 预分频寄存器TIMx_PSC
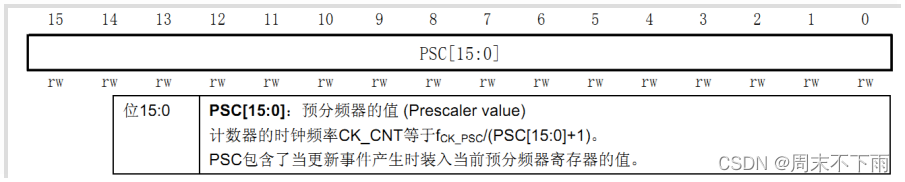
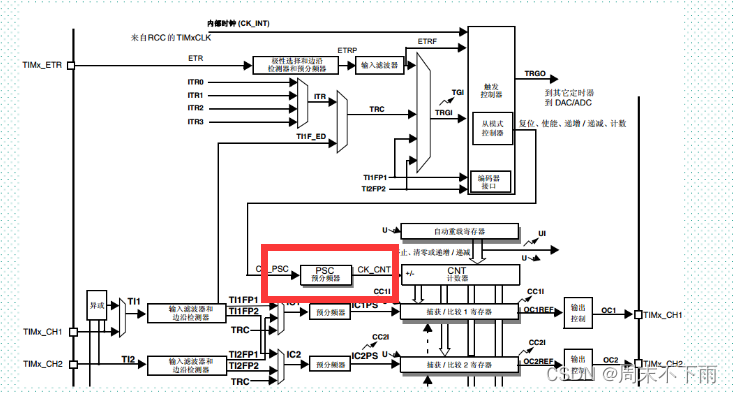
对时钟进行预分频
2.3 自动重装载寄存器(TIMx_ARR)
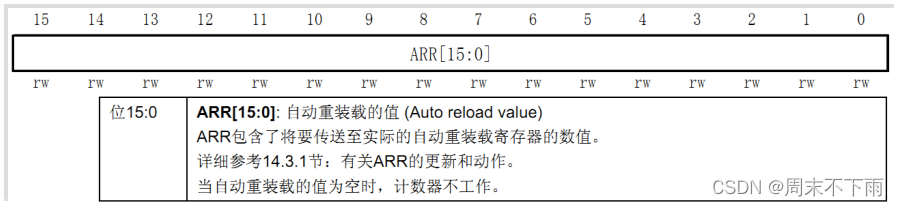
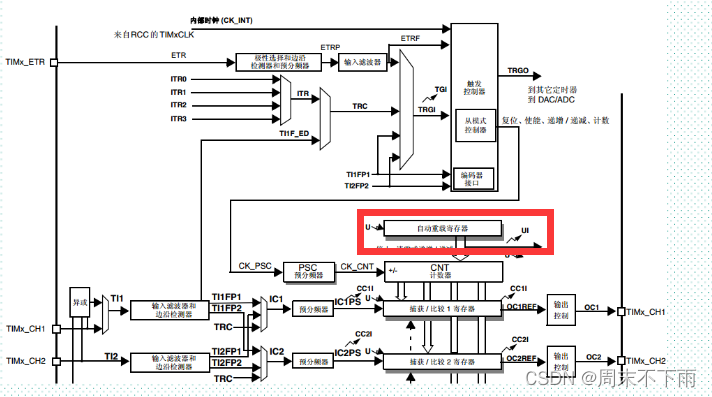
对计数器自动重装载(数值)
2.4 控制寄存器1(TIMx_CR1)
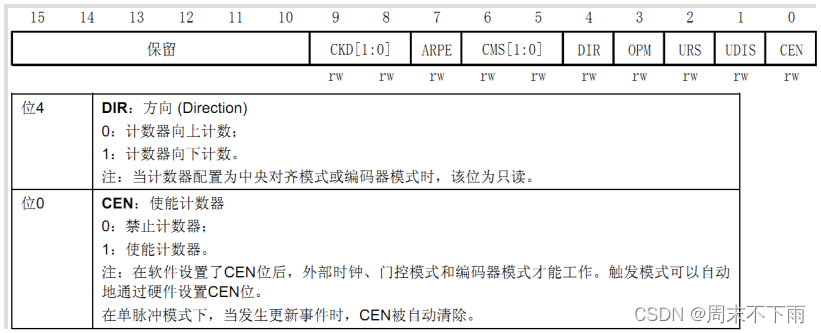
确定向上还是向下计数器
2.5 DMA中断使能寄存器(TIMx_DIER)
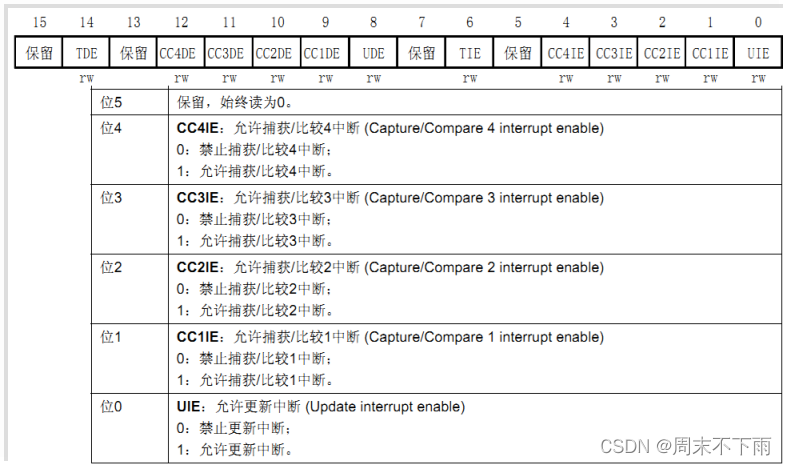
·位0·进行使能中断
2.6 定时器参数初始化
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
typedef struct
{
uint16_t TIM_Prescaler; //预分频系数
uint16_t TIM_CounterMode; //设置模式(向上向下)
uint16_t TIM_Period; //自动装载值
uint16_t TIM_ClockDivision; //
uint8_t TIM_RepetitionCounter; //高级定时器
} TIM_TimeBaseInitTypeDef;
主要是前面三个,下面是范例
TIM_TimeBaseStructure.TIM_Period = 4999; TIM_TimeBaseStructure.TIM_Prescaler =7199; TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
2.7 定时器使能函数
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState)
2.8 定时器中断使能函数
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState);
2.9 状态标志位获取和清除
FlagStatus TIM_GetFlagStatus(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
void TIM_ClearFlag(TIM_TypeDef* TIMx, uint16_t TIM_FLAG);
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT);
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT);
三、手把手写定时器中断实验
3.1 步骤
① 使能定时器时钟。
RCC_APB1PeriphClockCmd();
② 初始化定时器,配置ARR,PSC。
TIM_TimeBaseInit();
③ 开启定时器中断,配置NVIC。
NVIC_Init();
④ 使能定时器。
TIM_Cmd();
⑥ 编写中断服务函数。
TIMx_IRQHandler();
3.2 程序要求
通过定时器中断配置,每500ms中断一次,然后中断服务函数中控制LED实现LED1状态取反(闪烁)。
Tout(溢出时间)=(ARR+1)(PSC+1)/Tclk
3.3 timer.c
#include "timer.h"
#include "led.h"
void TIM3_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue;
NVIC_InitTypeDef NVIC_InitStruc;
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV2;
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStrue.TIM_Period=arr;
TIM_TimeBaseInitStrue.TIM_Prescaler=psc;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //使能定时器时钟
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStrue);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
NVIC_InitStruc.NVIC_IRQChannel=TIM3_IRQn;
NVIC_InitStruc.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruc.NVIC_IRQChannelPreemptionPriority=0X01;
NVIC_InitStruc.NVIC_IRQChannelSubPriority=0X03;
NVIC_Init(&NVIC_InitStruc);
TIM_Cmd(TIM3,ENABLE);
}
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)!=RESET)
{
LED1=!LED1;
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
}
}