一、uboot 的环境变量基础
1、环境变量的作用
(1) 让我们可以不用修改 uboot 的源代码,而是通过修改环境变量,来影响 uboot 运行时的一些数据和特性。譬如说,通过修改 bootdelay 环境变量,就可以更改系统开机自动启动时倒数的秒数。
2、环境变量的优先级
(1) uboot 代码当中有一个值,环境变量中也有一个值。uboot 程序实际运行时规则是:如果环境变量为空,则使用代码中的值;如果环境变量不为空,则优先使用环境变量对应的值。
(2) 譬如 machid(机器码)。uboot 中在 x210_sd.h 中定义了一个机器码 2456,写死在程序中的,不能更改。如果要修改 uboot 中配置的机器码,可以修改 x210_sd.h 中的机器码,但是修改源代码后需要重新编译烧录,很麻烦;
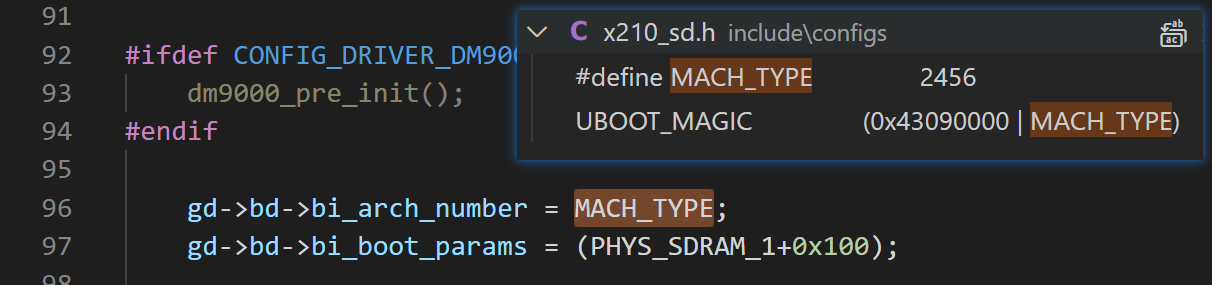
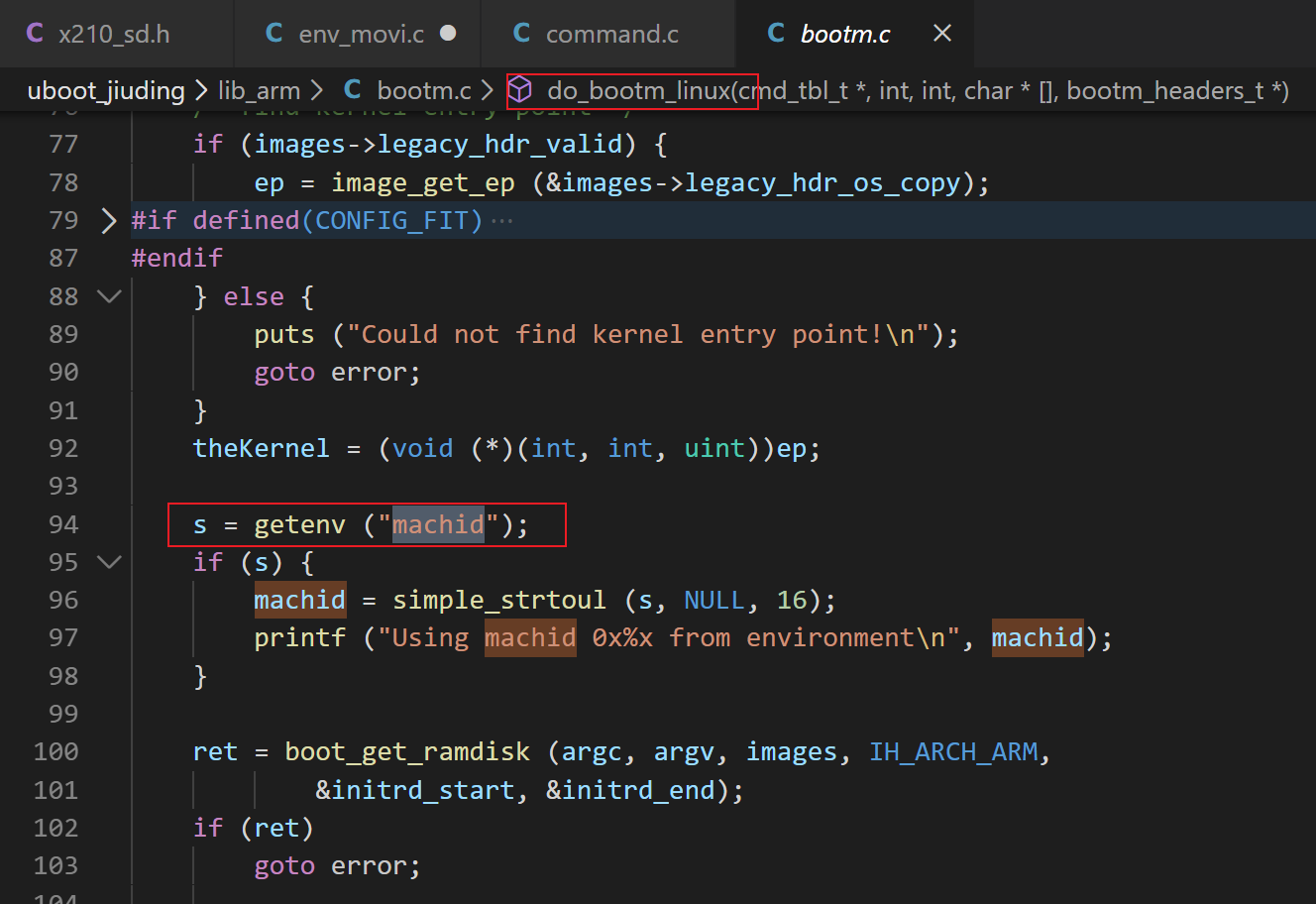
比较简单的方法就是,使用环境变量 machid。set machid 0x998 类似这样,有了 machid 环境变量后,系统启动时会优先使用 machid 对应的环境变量,这就是优先级问题。
3、环境变量在 uboot 中工作方式
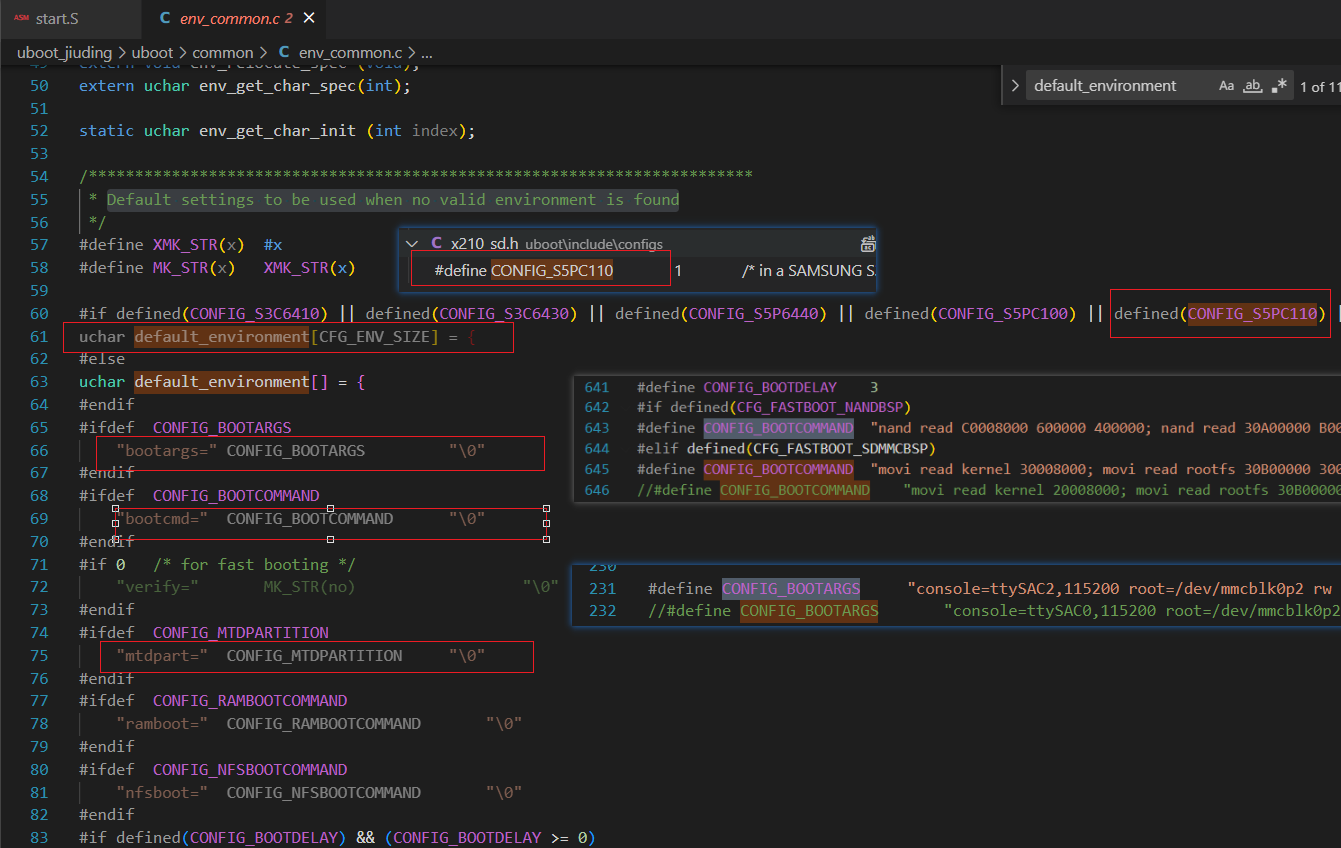
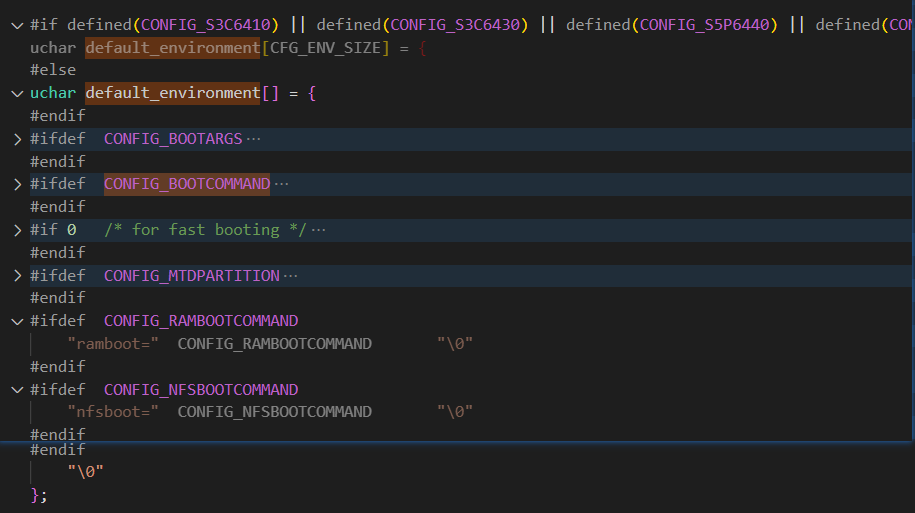
(1) 默认环境变量,在 uboot/common/env_common.c 中 default_environment,这东西本质是一个字符数组,大小为 CFG_ENV_SIZE(16 kByte),里面内容就是很多个环境变量连续分布组成的,每个环境变量最末端以 ‘\0’ 结束。
(2) SD 卡中的环境变量分区,在 uboot 的 raw 分区中。SD 卡中其实就是给了个分区,专门用来存储而已。存储时其实是把 DDR 中的环境变量整体的写入 SD 卡中分区里。所以当我们 saveenv 时,其实整个所有的环境变量都被保存了一遍,而不是只保存更改了的。
(3) DDR 中环境变量,在 default_environment 中,实质是字符数组。在 uboot 中其实是一个全局变量,链接时在数据段;重定位时,default_environment 就被重定位到 DDR 中一个内存地址处了。这个地址处,这个全局字符数组,就是我们 uboot 运行时的 DDR 中的环境变量了。


总结:
- 刚烧录的系统中,环境变量分区是空白的,uboot 第一次运行时,加载的是 uboot 代码中自带的一份环境变量,叫默认环境变量 default_environment。
- 我们在 saveenv 时,DDR 中的环境变量会被更新到 SD 卡中的环境变量中,就可以被保存下来,下次开机会在环境变量 relocate 时,SD 卡中的环境变量会被加载到 DDR 中去。
- default_environment 中的内容虽然被 uboot 源代码初始化为一定的值(这个值就是我们的默认环境变量),但是在 uboot 启动的第二阶段,env_relocate 时代码会去判断 SD 卡中的 env 分区的 crc 是否通过。如果 crc 校验通过,说明 SD 卡中有正确的环境变量存储,则 relocate 函数会从 SD 卡中读取环境变量来覆盖 default_environment 字符数组,从而每次开机可以保持上一次更改过的环境变量。
二、环境变量相关命令源码解析1
1、printenv
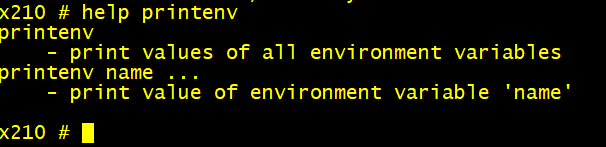
(1) 找到 printenv 命令所对应的函数。通过 printenv 的 help 可以看出,这个命令有 2 种使用方法。第一种直接使用不加参数,则打印所有的环境变量;第二种是 printenv name ,则只打印出 name 这个环境变量的值。
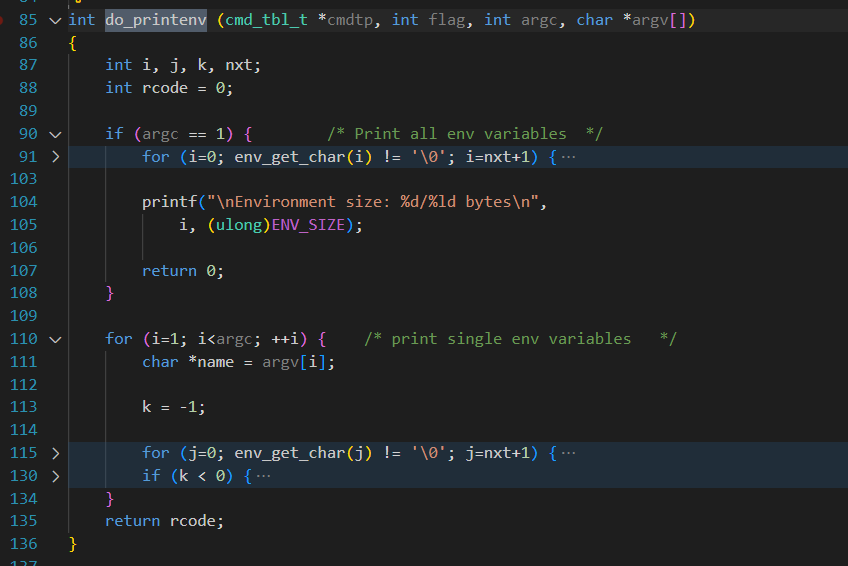
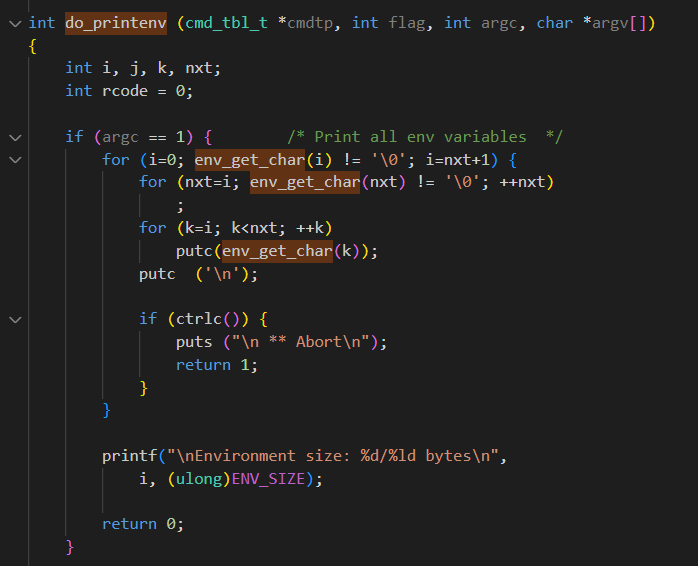
(2) 分析 do_printenv 函数。
int do_printenv (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[])
{
int i, j, k, nxt;
int rcode = 0;
if (argc == 1) { /* Print all env variables */
for (i=0; env_get_char(i) != '\0'; i=nxt+1) {
for (nxt=i; env_get_char(nxt) != '\0'; ++nxt)
;
for (k=i; k<nxt; ++k)
putc(env_get_char(k));
putc ('\n');
if (ctrlc()) {
puts ("\n ** Abort\n");
return 1;
}
}
printf("\nEnvironment size: %d/%ld bytes\n",
i, (ulong)ENV_SIZE);
return 0;
}
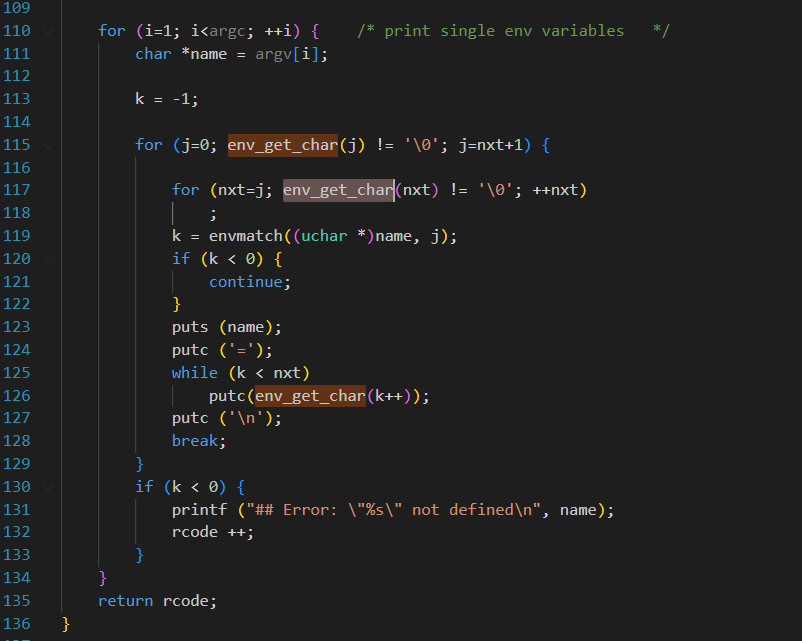
for (i=1; i<argc; ++i) { /* print single env variables */
char *name = argv[i];
k = -1;
for (j=0; env_get_char(j) != '\0'; j=nxt+1) {
for (nxt=j; env_get_char(nxt) != '\0'; ++nxt)
;
k = envmatch((uchar *)name, j);
if (k < 0) {
continue;
}
puts (name);
putc ('=');
while (k < nxt)
putc(env_get_char(k++));
putc ('\n');
break;
}
if (k < 0) {
printf ("## Error: \"%s\" not defined\n", name);
rcode ++;
}
}
return rcode;
}
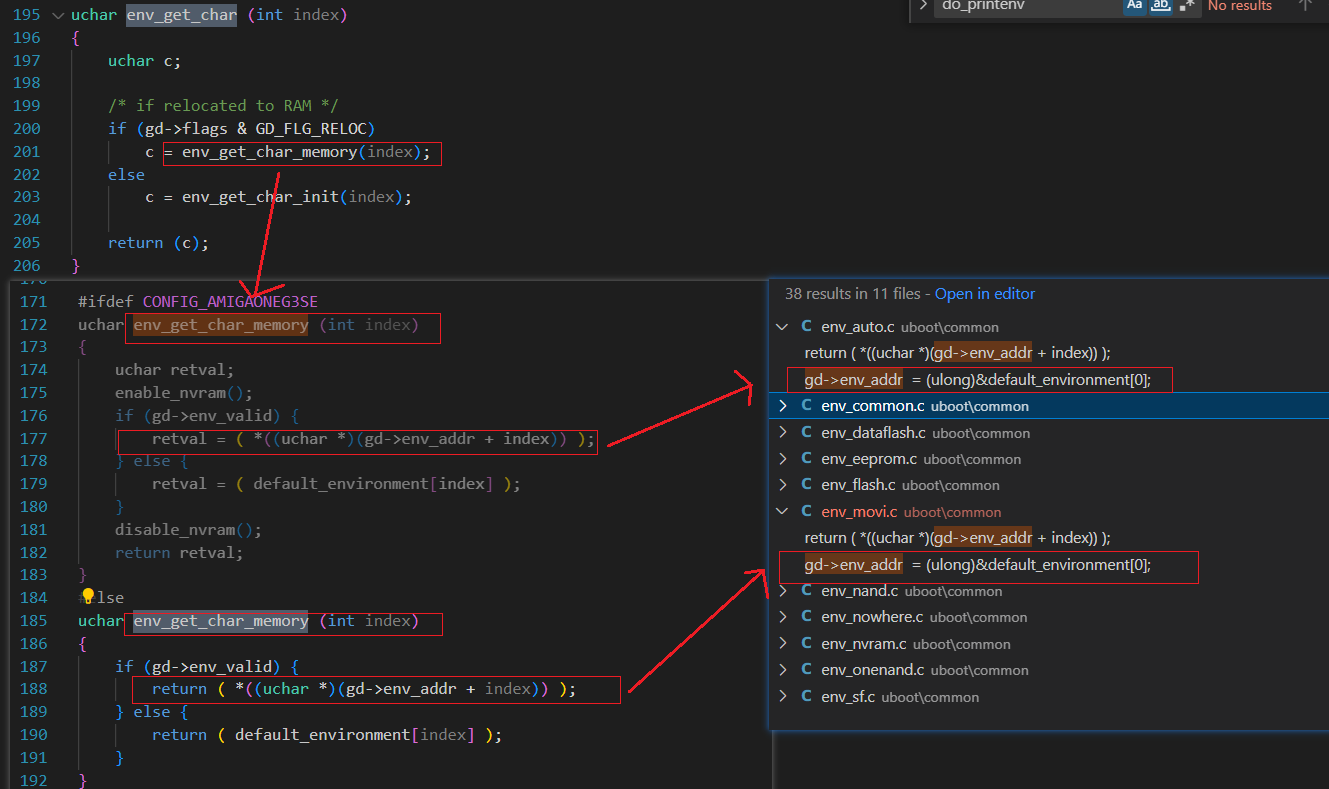
不论 SD 卡中是否有环境变量,以及是否发生环境变量覆盖,环境变量的首地址总是 default_environment 字符数组的首地址。
(3) do_printenv 函数首先区分 argc=1 还是不等于 1 的情况,若 argc=1 ,那么就循环打印所有的环境变量出来;如果 argc 不等于 1,则后面的参数就是要打印的环境变量,给哪个就打印哪个。
(4) argc=1 时,用双重 for 循环来依次处理所有的环境变量的打印。第一重 for 循环就是处理各个环境变量。所以有多少个环境变量,则第一重就执行循环多少圈。
(5) 这个函数要看懂,首先要明白整个环境变量在内存中如何存储的问题。
(6) 关键点:第一,要明白环境变量在内存中存储的方式;第二,要 C 语言处理字符串的功底要好。
三、环境变量相关命令源码解析 2
1、setenv
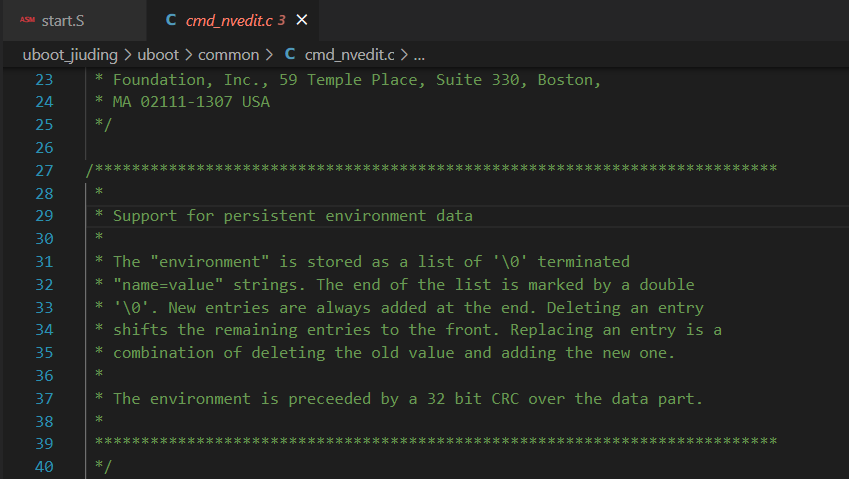
(1) 命令定义和对应的函数在 uboot/common/cmd_nvedit.c 中,对应的函数为 do_setenv。
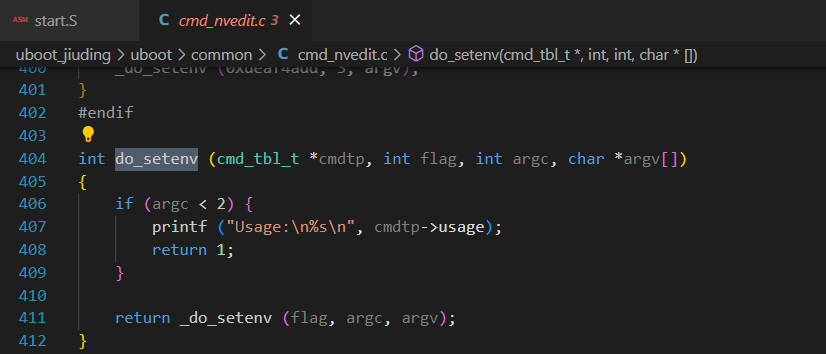
(2) setenv 的思路就是:先去 DDR 中的环境变量处寻找原来有没有这个环境变量,如果原来就有,则需要覆盖原来的环境变量,如果原来没有则在最后新增一个环境变量即可。
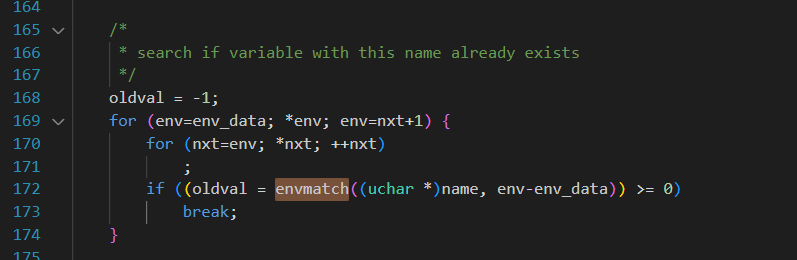
第1步:遍历 DDR 中环境变量的数组,找到原来就有的那个环境变量对应的地址。168-174 行。
第2步:擦除原来的环境变量,259-265 行。
第3步:写入新的环境变量,266-273 行。
(3)本来 setenv 做完上面的就完了,但是还要考虑一些附加的问题。
问题一:环境变量太多,超出 DDR 中的字符数组,溢出的解决方法。
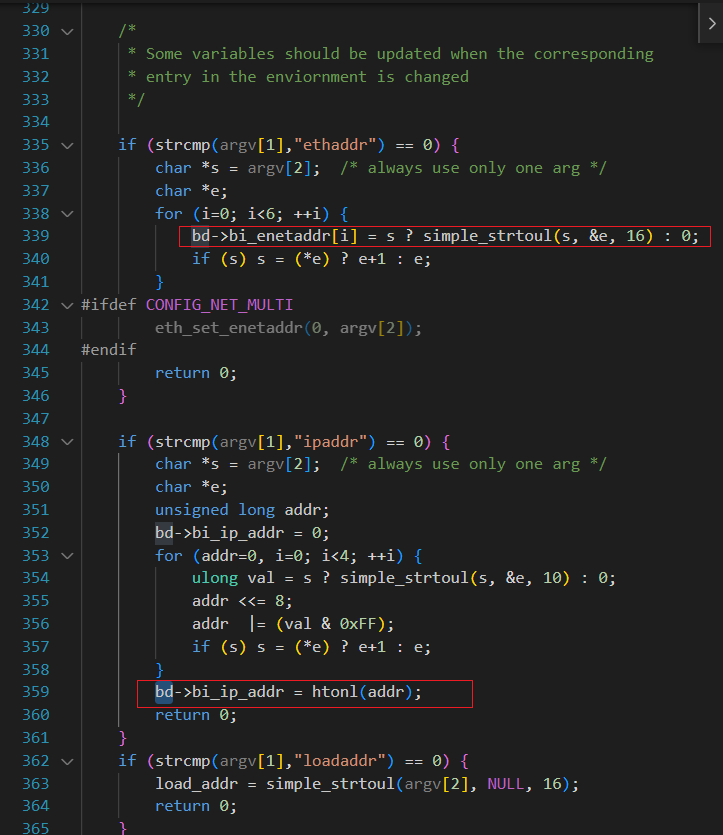
问题二:有些环境变量如 baudrate、ipaddr 等,在 gd 中有对应的全局变量。这种环境变量在 set 更新的时候,要同时去更新对应的全局变量,否则就会出现在本次运行中,环境变量和全局变量的值不一致的情况。
四、环境变量相关命令源码解析 2
1、saveenv
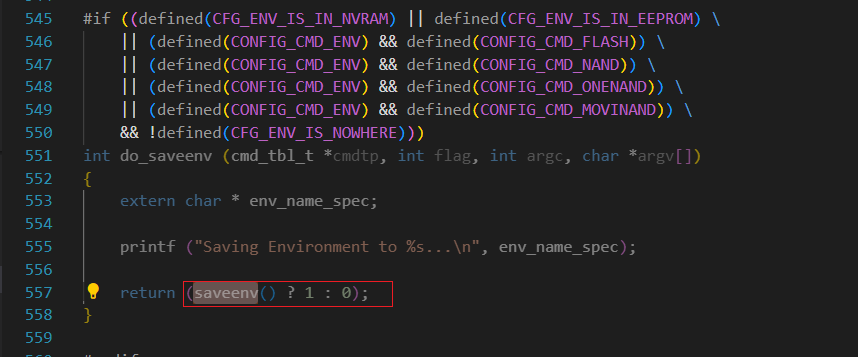
(1) 在 uboot/common/cmd_nvedit.c 中,对应函数为 do_saveenv。
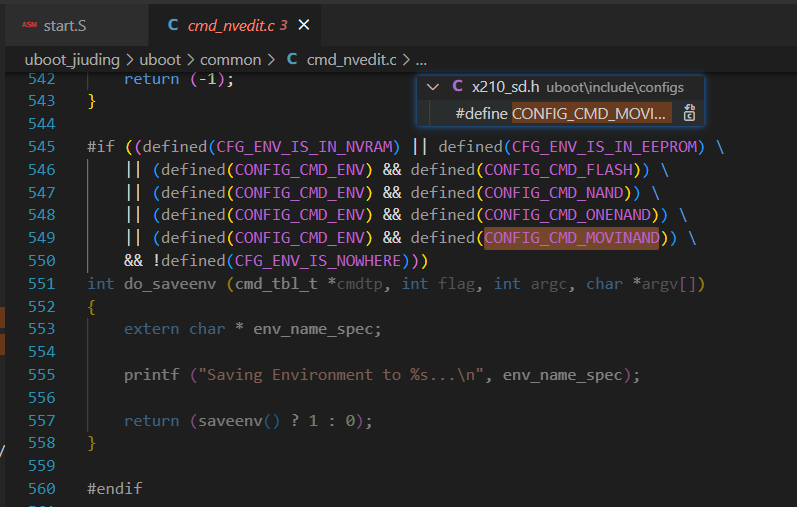
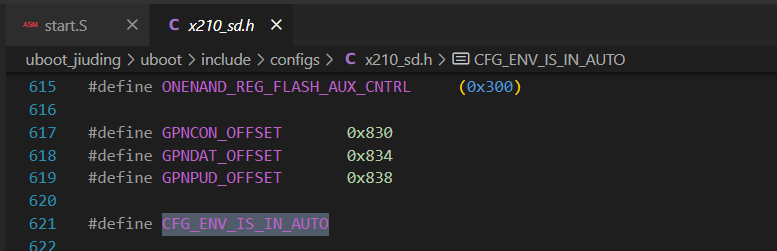
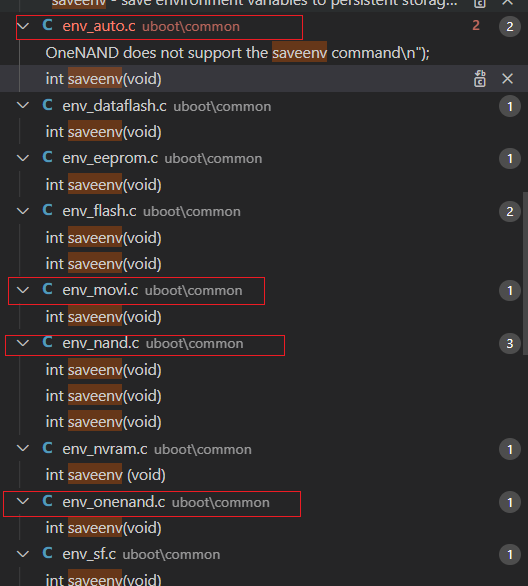
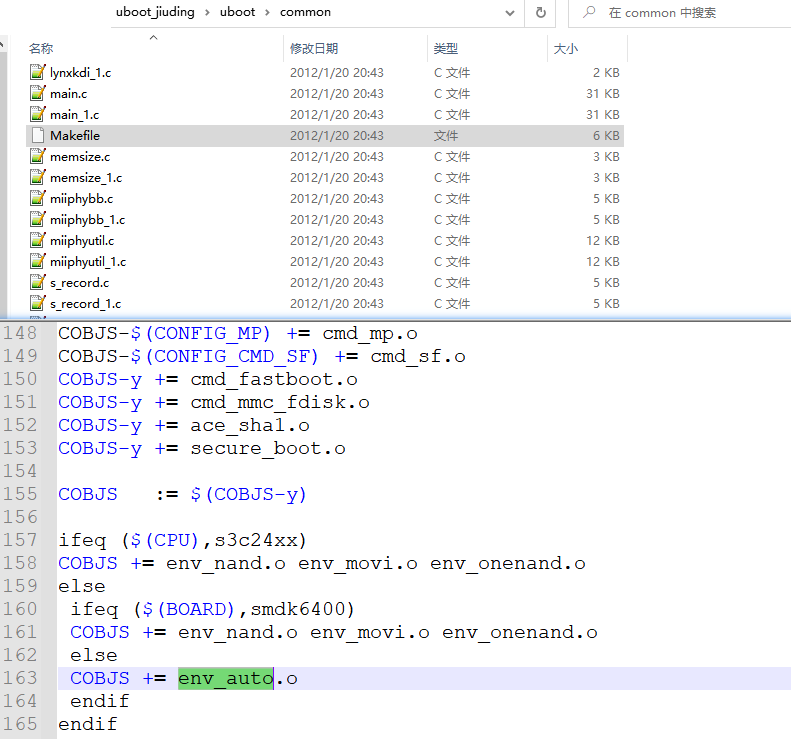
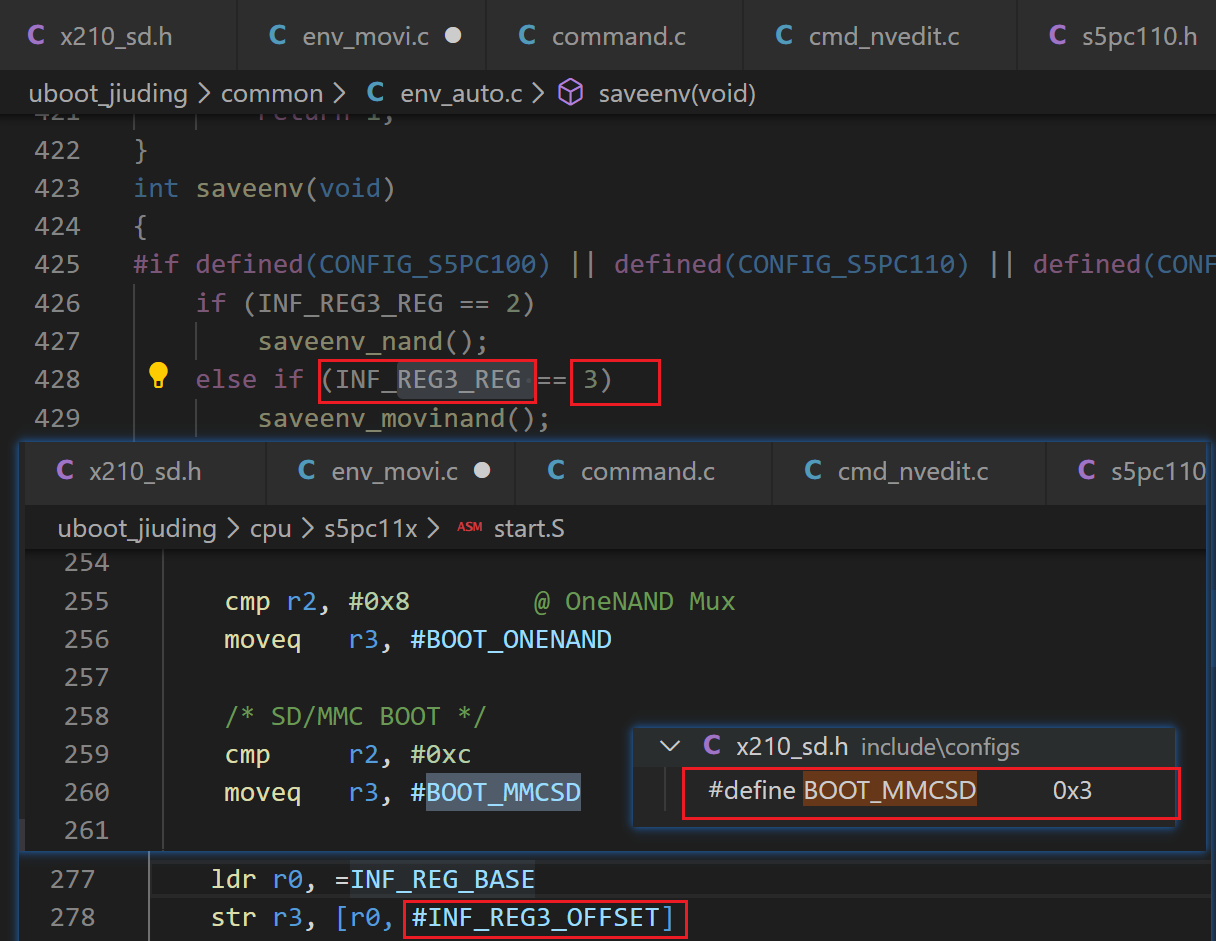
(2) 从 uboot 实际执行 saveenv 命令的输出,和 x210_sd.h 中的配置(#define CFG_ENV_IS_IN_AUTO)可以分析出:我们实际使用的是 env_auto.c 中相关的内容。没有一种芯片叫 auto 的,env_auto.c 中是使用宏定义的方式,去条件编译了各种常见的 flash 芯片(如 movinand、norflash、nand 等)。然后在程序中读取 INF_REG(OMpin 内部对应的寄存器)从而知道我们的启动介质,然后调用这种启动介质对应的操作函数来操作。
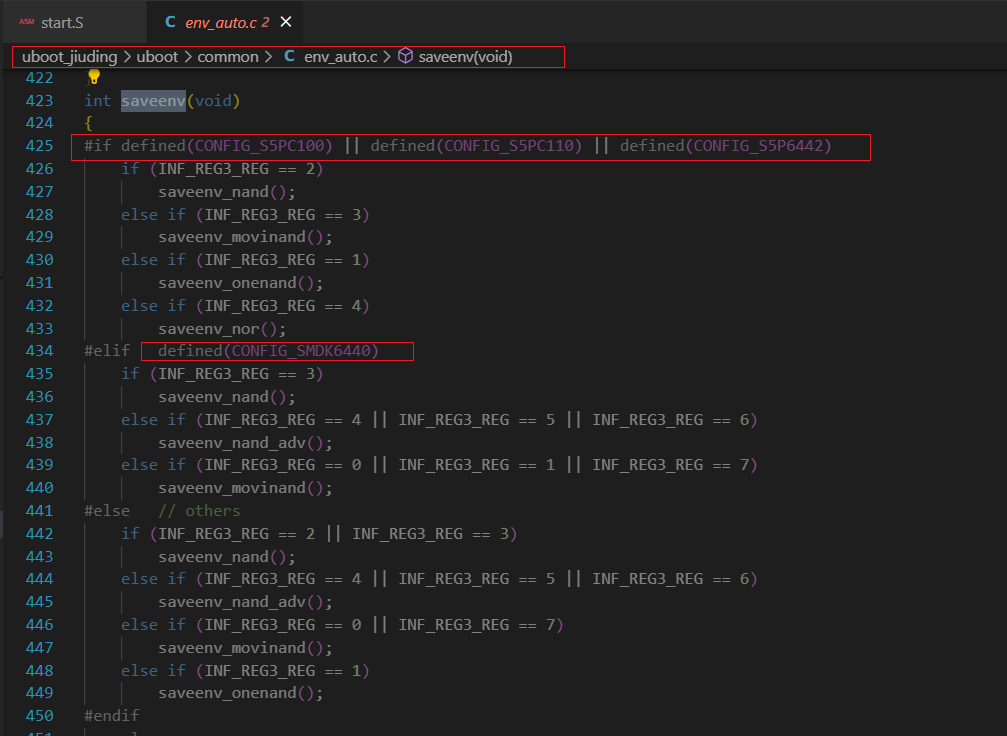
(3) do_saveenv 内部调用 env_auto.c 中的 saveenv 函数来执行实际的环境变量保存操作。
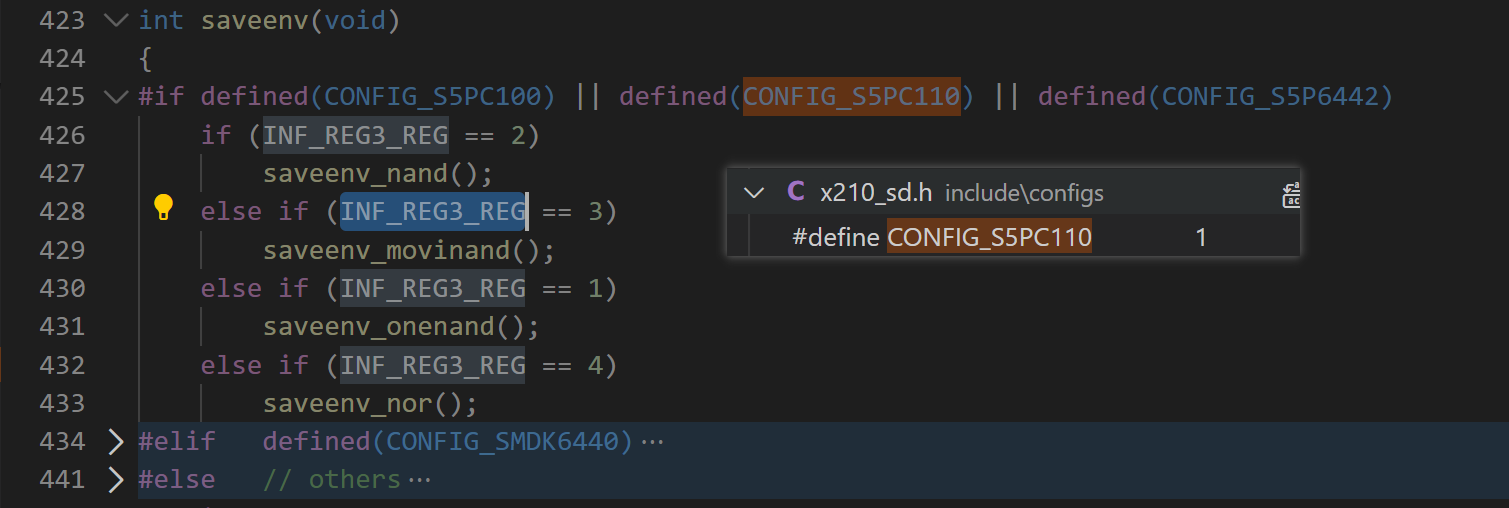
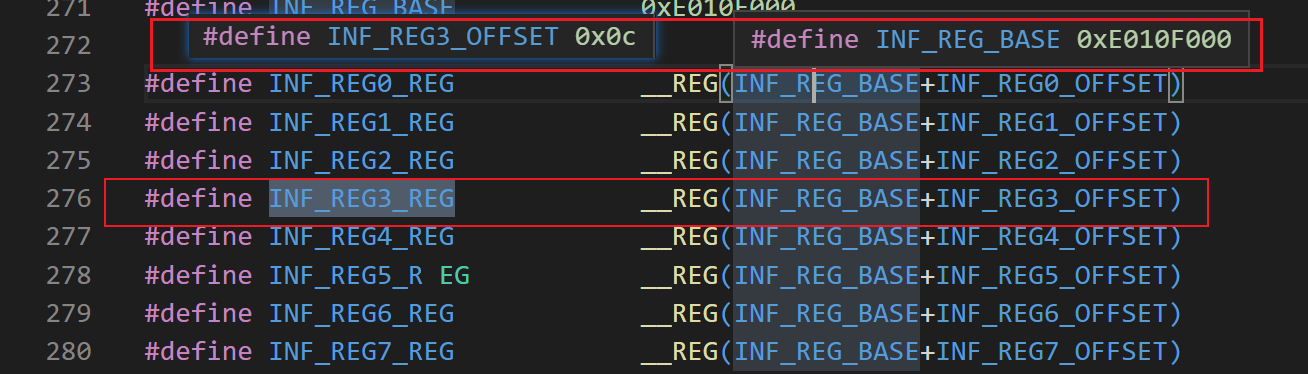
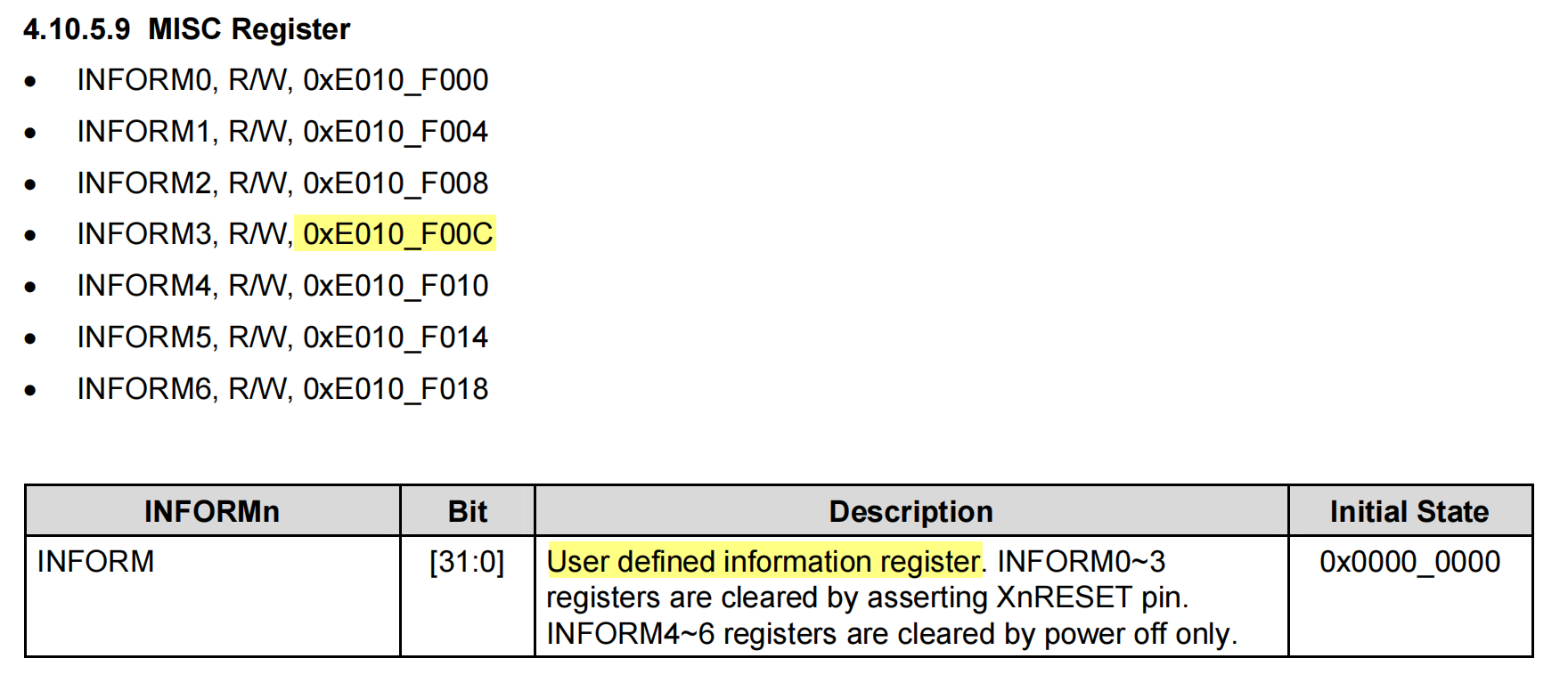
(4) 寄存器地址:E010F000 + 0C=E010_F00C,含义是用户自定义数据。我们在 start.S 中判断启动介质后,将 #BOOT_MMCSD(就是 3,定义在x210_sd.h)写入了这个寄存器,所以这里读出的肯定是 3,经过判断就是 movinand。所以实际执行的函数是:saveenv_movinand。
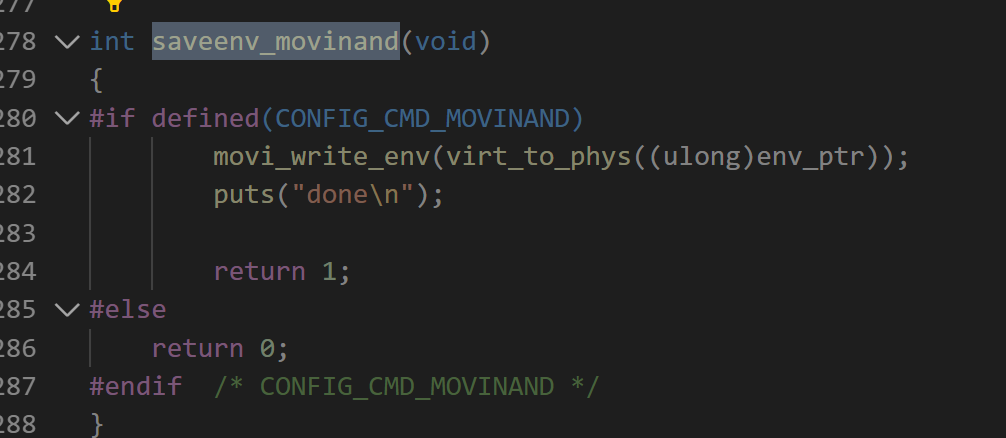
(5) 真正执行保存环境变量操作的是:cpu/s5pc11x/movi.c 中的 movi_write_env 函数,这个函数肯定是写 sd卡,将 DDR 中的环境变量数组(其实就是 default_environment 这个数组,大小 16kb,刚好 32 个扇区)写入 iNand 中的 ENV 分区中。
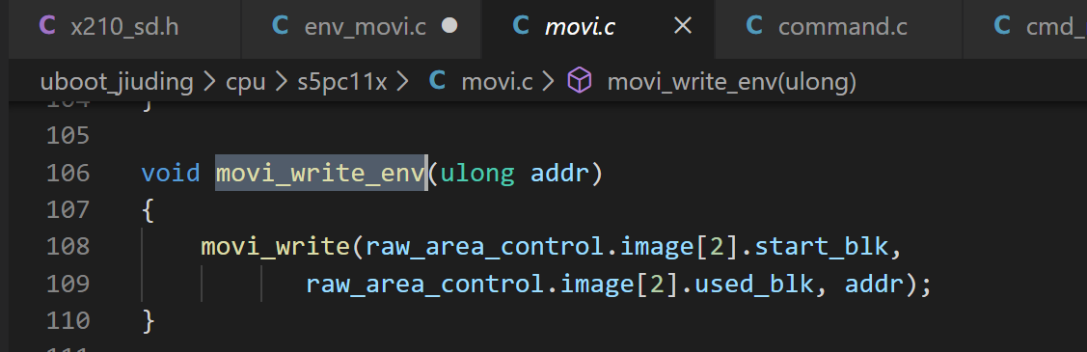
(6) raw_area_control 是 uboot 中规划 iNnad/SD 卡的原始分区表,这个里面记录了我们对 iNand 的分区,env 分区也在这里,下标是2。 追到这一层就够了,再里面就是调用驱动部分的写 SD卡/iNand 的底层函数了。
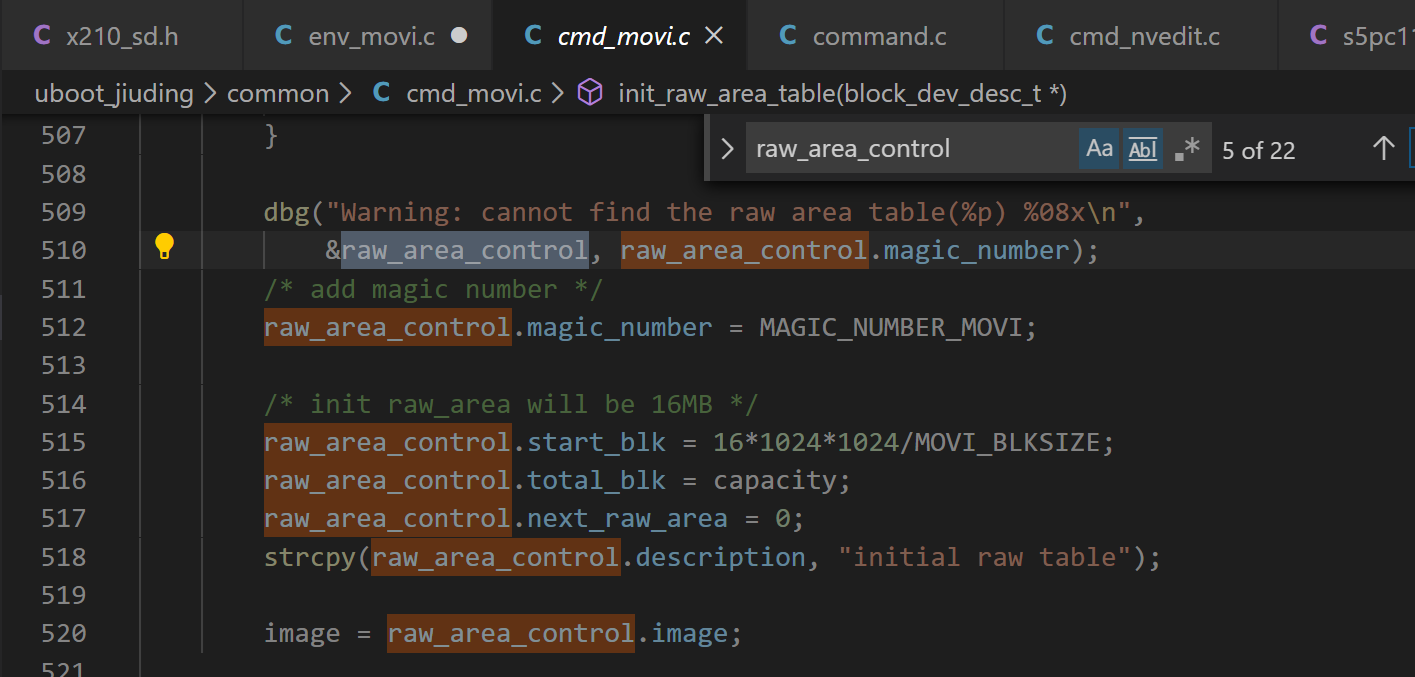
int init_raw_area_table (block_dev_desc_t * dev_desc)
{
struct mmc *host = find_mmc_device(dev_desc->dev);
/* when last block does not have raw_area definition. */
if (raw_area_control.magic_number != MAGIC_NUMBER_MOVI) {
int i = 0;
member_t *image;
u32 capacity;
if (host->high_capacity) {
capacity = host->capacity;
#ifdef CONFIG_S3C6410
if(IS_SD(host))
capacity -= 1024;
#endif
} else {
capacity = host->capacity;
}
dev_desc->block_read(dev_desc->dev,
capacity - (eFUSE_SIZE/MOVI_BLKSIZE) - 1,
1, &raw_area_control);
if (raw_area_control.magic_number == MAGIC_NUMBER_MOVI) {
return 0;
}
dbg("Warning: cannot find the raw area table(%p) %08x\n",
&raw_area_control, raw_area_control.magic_number);
/* add magic number */
raw_area_control.magic_number = MAGIC_NUMBER_MOVI;
/* init raw_area will be 16MB */
raw_area_control.start_blk = 16*1024*1024/MOVI_BLKSIZE;
raw_area_control.total_blk = capacity;
raw_area_control.next_raw_area = 0;
strcpy(raw_area_control.description, "initial raw table");
image = raw_area_control.image;
#if defined(CONFIG_EVT1)
#if defined(CONFIG_FUSED)
/* image 0 should be fwbl1 */
image[0].start_blk = (eFUSE_SIZE/MOVI_BLKSIZE);
image[0].used_blk = MOVI_FWBL1_BLKCNT;
image[0].size = FWBL1_SIZE;
image[0].attribute = 0x0;
strcpy(image[0].description, "fwbl1");
dbg("fwbl1: %d\n", image[0].start_blk);
#endif
#endif
/* image 1 should be bl2 */
#if defined(CONFIG_EVT1)
#if defined(CONFIG_FUSED)
image[1].start_blk = image[0].start_blk + MOVI_FWBL1_BLKCNT;
#else
image[1].start_blk = (eFUSE_SIZE/MOVI_BLKSIZE);
#endif
#else
image[1].start_blk = capacity - (eFUSE_SIZE/MOVI_BLKSIZE) -
MOVI_BL1_BLKCNT;
#endif
image[1].used_blk = MOVI_BL1_BLKCNT;
image[1].size = SS_SIZE;
image[1].attribute = 0x1;
strcpy(image[1].description, "u-boot parted");
dbg("bl1: %d\n", image[1].start_blk);
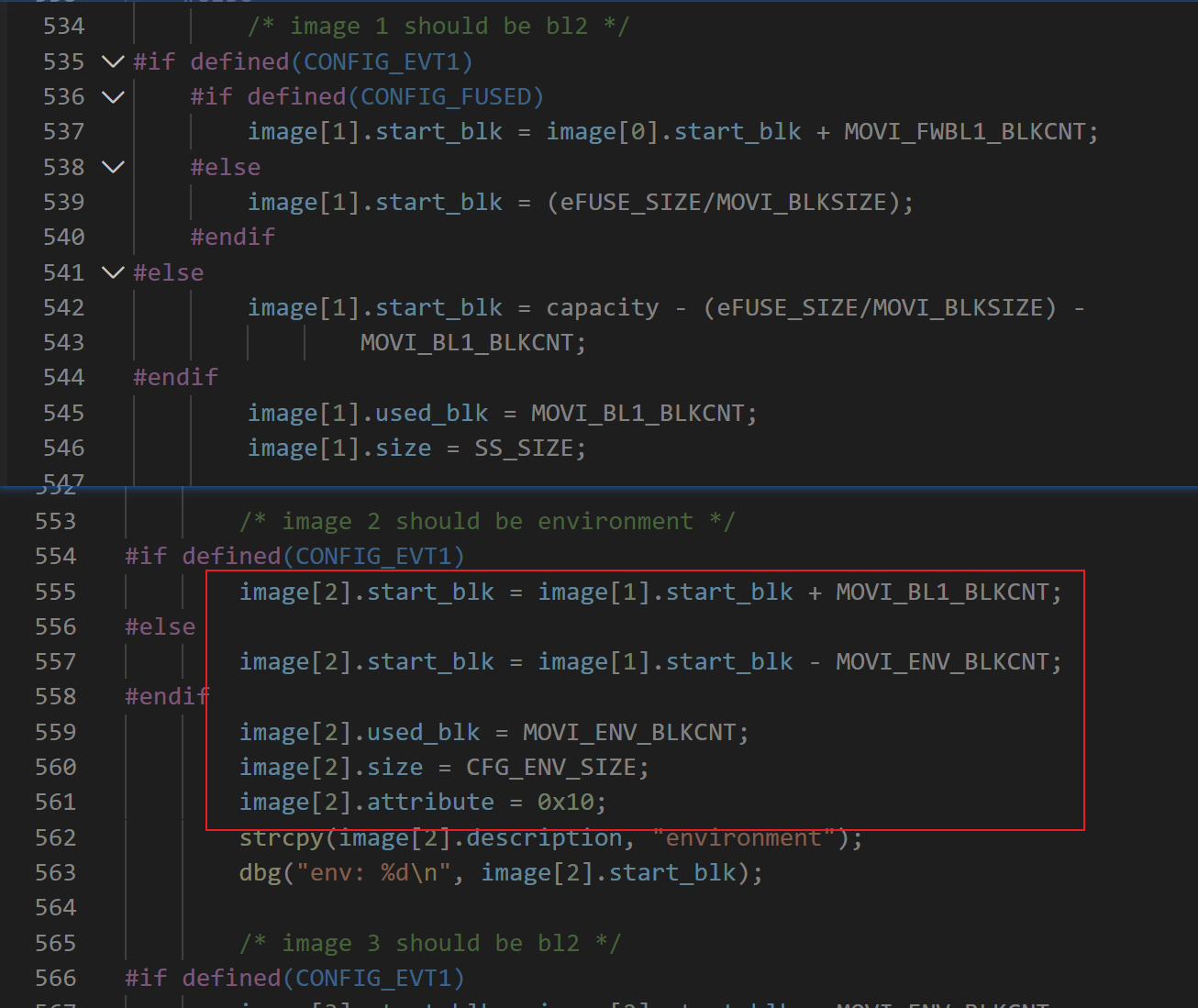
/* image 2 should be environment */
#if defined(CONFIG_EVT1)
image[2].start_blk = image[1].start_blk + MOVI_BL1_BLKCNT;
#else
image[2].start_blk = image[1].start_blk - MOVI_ENV_BLKCNT;
#endif
image[2].used_blk = MOVI_ENV_BLKCNT;
image[2].size = CFG_ENV_SIZE;
image[2].attribute = 0x10;
strcpy(image[2].description, "environment");
dbg("env: %d\n", image[2].start_blk);
/* image 3 should be bl2 */
#if defined(CONFIG_EVT1)
image[3].start_blk = image[2].start_blk + MOVI_ENV_BLKCNT;
#else
image[3].start_blk = image[2].start_blk - MOVI_BL2_BLKCNT;
#endif
image[3].used_blk = MOVI_BL2_BLKCNT;
image[3].size = PART_SIZE_BL;
image[3].attribute = 0x2;
strcpy(image[3].description, "u-boot");
dbg("bl2: %d\n", image[3].start_blk);
/* image 4 should be kernel */
#if defined(CONFIG_EVT1)
image[4].start_blk = image[3].start_blk + MOVI_BL2_BLKCNT;
#else
image[4].start_blk = image[3].start_blk - MOVI_ZIMAGE_BLKCNT;
#endif
image[4].used_blk = MOVI_ZIMAGE_BLKCNT;
image[4].size = PART_SIZE_KERNEL;
image[4].attribute = 0x4;
strcpy(image[4].description, "kernel");
dbg("knl: %d\n", image[4].start_blk);
/* image 5 should be RFS */
#if defined(CONFIG_EVT1)
image[5].start_blk = image[4].start_blk + MOVI_ZIMAGE_BLKCNT;
#else
image[5].start_blk = image[4].start_blk - MOVI_ROOTFS_BLKCNT;
#endif
image[5].used_blk = MOVI_ROOTFS_BLKCNT;
image[5].size = PART_SIZE_ROOTFS;
image[5].attribute = 0x8;
strcpy(image[5].description, "rfs");
dbg("rfs: %d\n", image[5].start_blk);
for (i=6; i<15; i++) {
raw_area_control.image[i].start_blk = 0;
raw_area_control.image[i].used_blk = 0;
}
}
}
五、uboot 内部获取环境变量
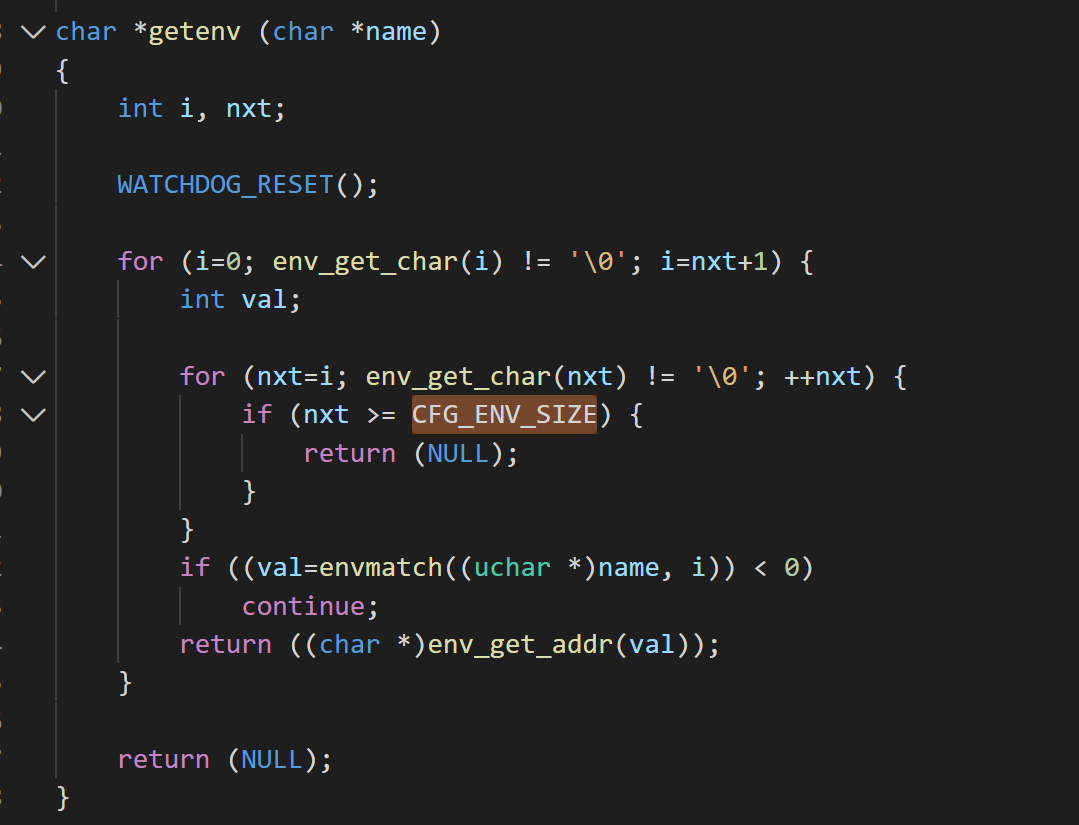
1、getenv
(1) 应该是不可重入的。
(2) 实现方式就是,去遍历 default_environment 数组,挨个拿出所有的环境变量比对 name,找到相等的直接返回这个环境变量的首地址即可。
2、getenv_r
(1) 可重入版本。(可自行搜索补充可重入函数的概念)
(2) getenv 函数是直接返回这个找到的环境变量在 DDR 中环境变量处的地址,而 getenv_r 函数的做法是,找到了 DDR 中环境变量地址后,将这个环境变量复制一份到提供的 buf 中,而不去动原来 DDR 中环境变量。
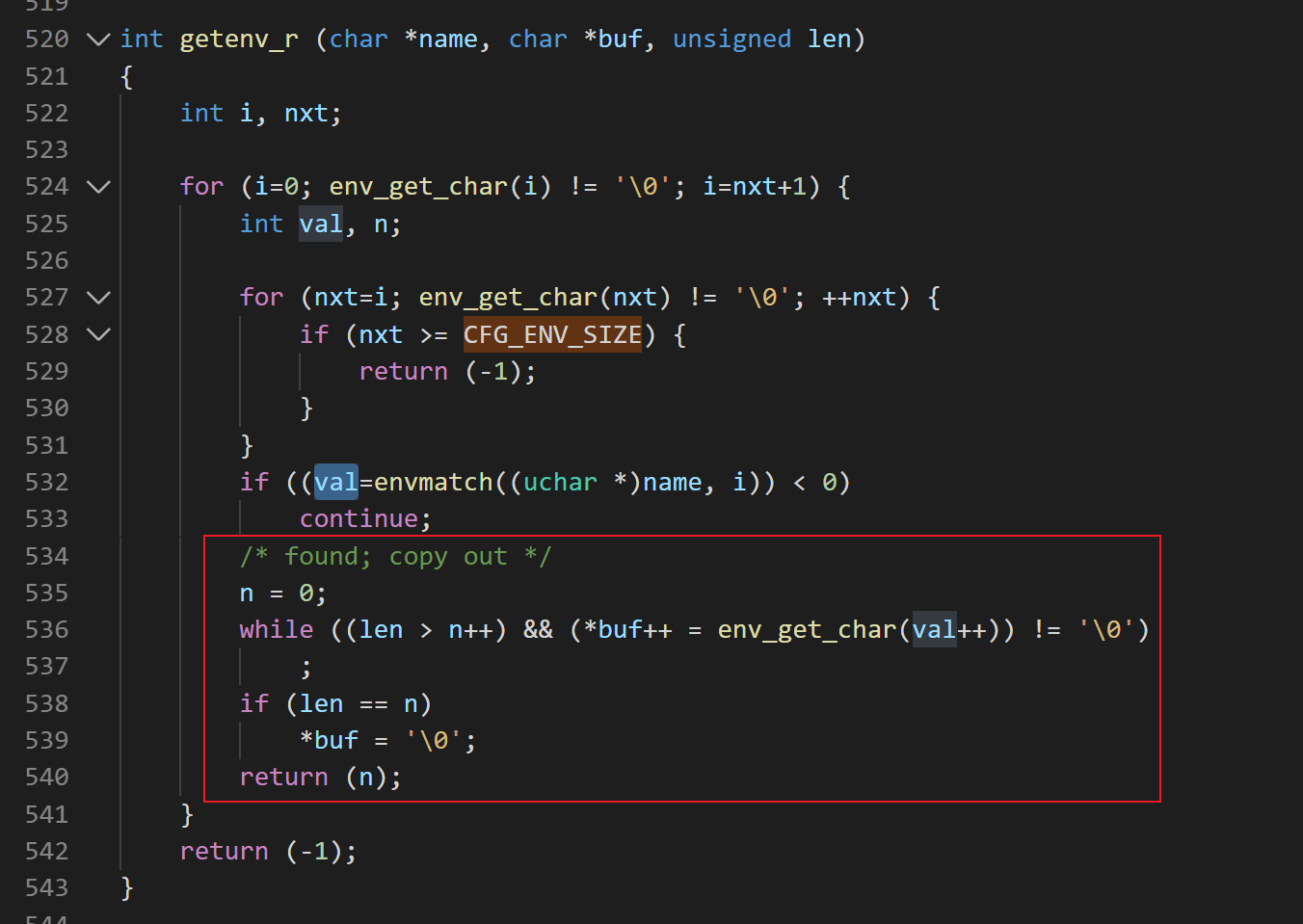
所以差别就是:getenv 中返回的地址,只能读,不能随便乱写,而 getenv_r 中返回的环境变量是在自己提供的 buf 中,是可以随便改写加工的。
3、总结
(1) 功能是一样的,但是可重入版本会比较安全一些,建议使用。
(2) 有关于环境变量的所有操作,主要理解了环境变量在 DDR 中的存储方法,理解了环境变量和 gd 全局变量的关联和优先级,理解了环境变量在存储介质中的存储方式(专用raw分区),整个环境变量相关的都清楚了。
源自朱有鹏老师.


![[计算机网络(第八版)]第二章 物理层(学习笔记)](https://img-blog.csdnimg.cn/9b29482cceba4cf29ad661ba5db5da72.png)