1. HOG特征简介
特征描述符是图像或图像补丁的表示形式,它通过提取有用信息并丢弃无关信息来简化图像。
- 通常,特征描述符将大小
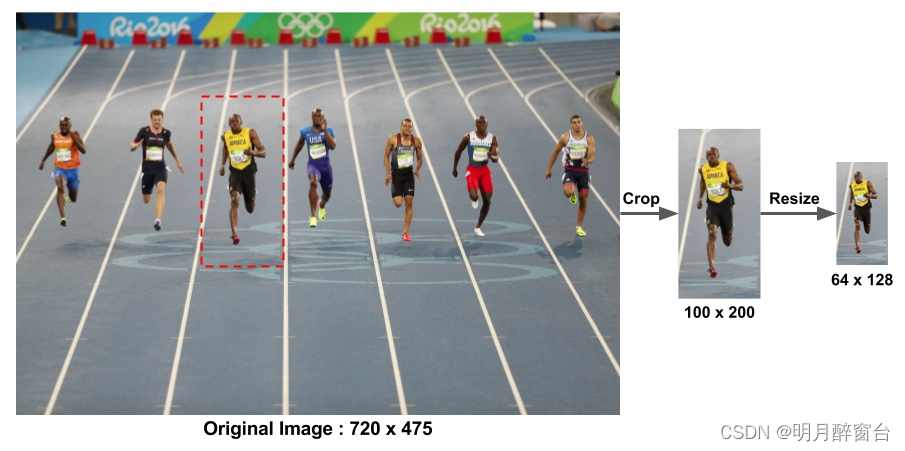
W x H x 3(通道)的图像转换为长度为n的特征向量/数组。对于 HOG 特征描述符,输入图像的大小为64 x 128 x 3,输出特征向量的长度为3780。 - 在HOG特征描述符中,梯度方向的分布(直方图)被用作特征。图像的渐变(x和y导数)很有用,因为边缘和角落(强度突然变化的区域)周围的梯度大小很大,我们知道边缘和角落比平面区域包含更多关于物体形状的信息。
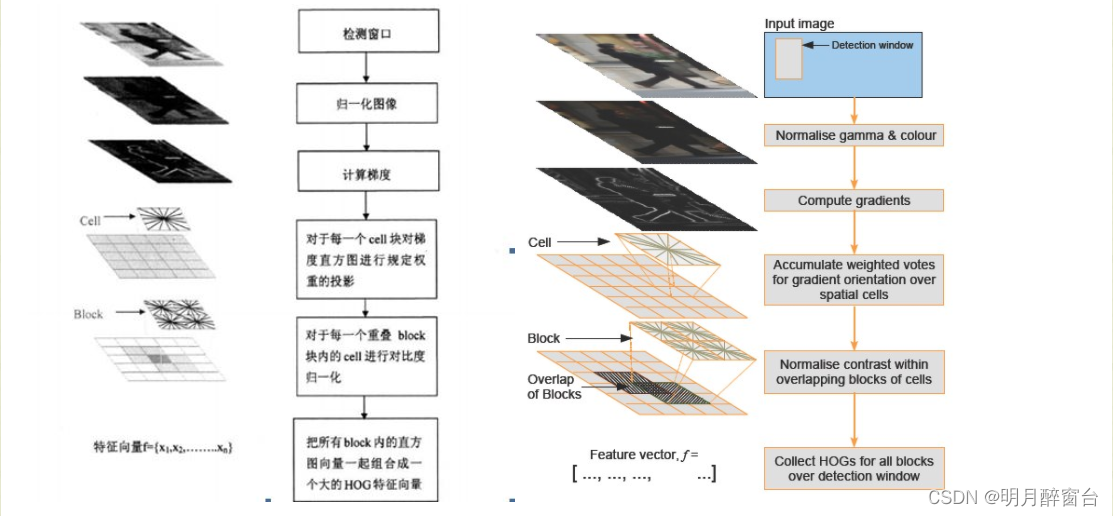
- HOG(Histogram of Oriented Gridients的简写)特征检测算法,最早是由法国研究员Dalal等在CVPR-2005上提出来的,一种解决人体目标检测的图像描述子,是一种用于表征图像局部梯度方向和梯度强度分布特性的描述符。其主要思想是:在边缘具体位置未知的情况下,边缘方向的分布也可以很好的表示行人目标的外形轮廓。
- HOG特征检测算法的几个步骤:
图像预处理—>梯度计算—>梯度方向直方图—>重叠块直方图归一化—>HOG特征。下面分别对其进行介绍。
2. HOG算法实现
2.1 图像预处理
-
图像缩放
用于行人检测的 HOG 特征描述符是在图像的 64×128 个尺寸上计算的。当然,图像可以是任何大小。通常,在许多图像位置分析多个尺度的斑块。唯一的限制是正在分析的修补程序具有固定的纵横比。在我们的例子中,补丁需要具有 1:2 的纵横比。例如,它们可以是 100×200、128×256 或 1000×2000,但不能是 101×205。
-
灰度化
对于彩色图像,可以将将RGB分量转化成灰度图像,其转化公式为:

-
伽马校正
在图像照度不均匀的情况下,可以通过Gamma校正,将图像整体亮度提高或降低。在实际中可以采用两种不同的方式进行Gamma标准化,平方根、对数法。这里我们采用平方根的办法,公式如下(其中γ=0.5):

2.2 计算梯度图像
- 注:下边步骤省略灰度化、伽马变化过程,以行人的彩色图像为例计算HOG特征
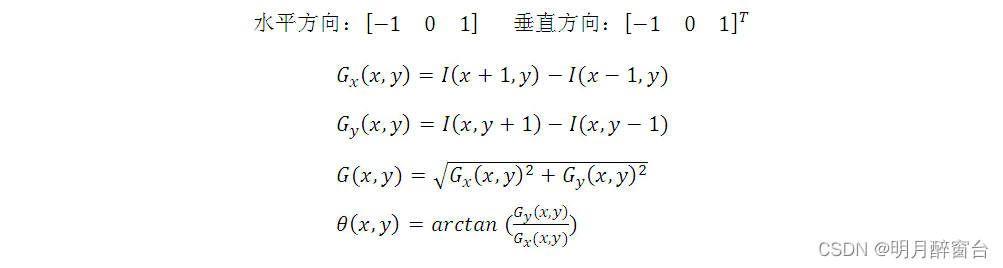
要计算 HOG 描述符,我们需要首先计算水平和垂直梯度;毕竟,我们要计算梯度的直方图。这可以通过使用以下内核过滤图像轻松实现。
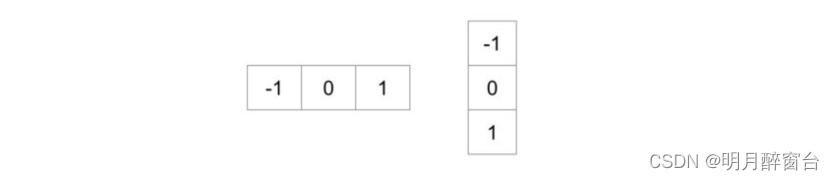
我们也可以通过在内核大小为 1 的 OpenCV 中使用 Sobel 运算符来实现相同的结果:
// C++ gradient calculation.
// Read image
Mat img = imread("bolt.png");
img.convertTo(img, CV_32F, 1/255.0);
// Calculate gradients gx, gy
Mat gx, gy;
Sobel(img, gx, CV_32F, 1, 0, 1);
Sobel(img, gy, CV_32F, 0, 1, 1);
# Python gradient calculation
# Read image
im = cv2.imread('bolt.png')
im = np.float32(im) / 255.0
# Calculate gradient
gx = cv2.Sobel(img, cv2.CV_32F, 1, 0, ksize=1)
gy = cv2.Sobel(img, cv2.CV_32F, 0, 1, ksize=1)
接下来,我们可以使用以下公式找到梯度的大小和方向:
如果您使用的是OpenCV,则可以使用函数cartToPolar完成计算,如下所示:
// C++ Calculate gradient magnitude and direction (in degrees)
Mat mag, angle;
cartToPolar(gx, gy, mag, angle, 1);
Python代码如下:
# Python Calculate gradient magnitude and direction ( in degrees )
mag, angle = cv2.cartToPolar(gx, gy, angleInDegrees=True)
下图显示了渐变:
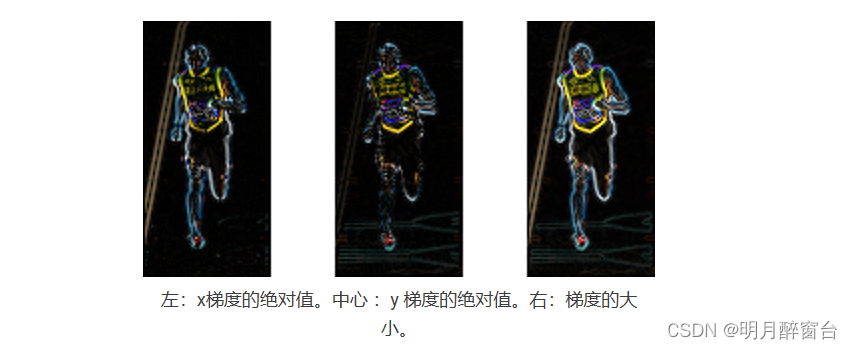
在每个像素处,梯度都有一个大小和一个方向。对于彩色图像,将评估三个通道的梯度(如上图所示)。一个像素处的梯度大小是三个通道梯度大小的最大值,角度是最大梯度对应的角度。
2.3 计算8×8个单元格中的梯度直方图
- 为什么是8×8补丁?为什么不是 32×32 ?这是一个由我们正在寻找的功能规模决定的设计选择。HOG最初用于行人检测。在一张比例为8×8的行人照片中,64×128个单元格足够大,可以捕捉有趣的特征(例如面部,头顶等)。
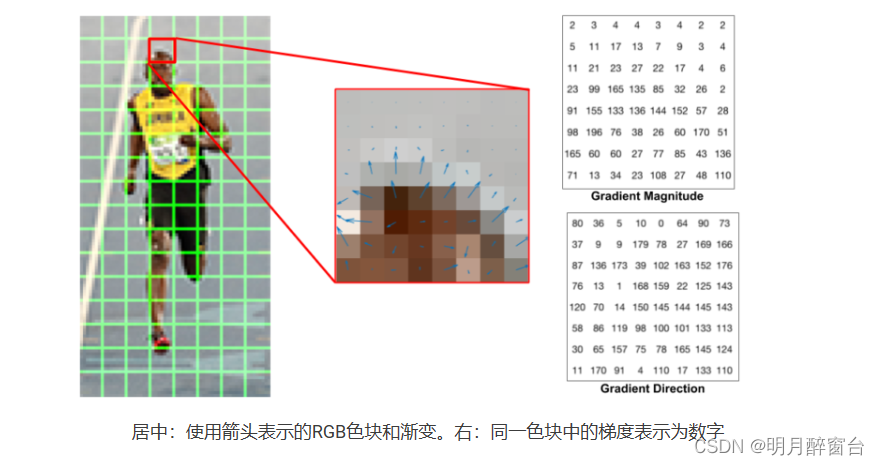
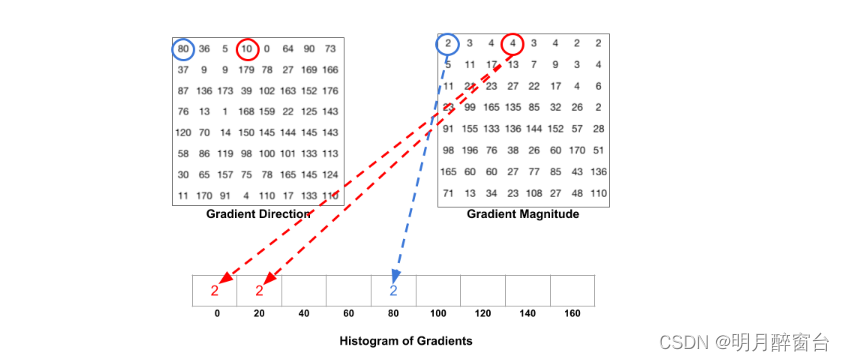
- 下一步是在这 8×8 个单元格中创建梯度直方图。直方图包含 9 个箱,对应于角度 0、20、40 …160. 下图说明了该过程。我们正在研究与上图相同的 8×8 补丁的梯度的大小和方向。
- 根据方向选择箱,并根据大小选择投票(进入箱的值)。让我们首先关注用蓝色包围的像素。它的角度(方向)为80度,星等为2。因此,它将 2 添加到第 5 个箱中。使用红色包围的像素处的梯度角度为 10 度,星等为 4。由于 10 度介于 0 和 20 之间,因此像素的投票将均匀地分成两个箱。
- 还有一个细节需要注意。如果角度大于 160 度,则介于 160 和 180 之间,我们知道角度环绕使 0 和 180 等效。因此,在下面的示例中,角度为 165 度的像素按比例贡献 0 度箱和 160 度箱。
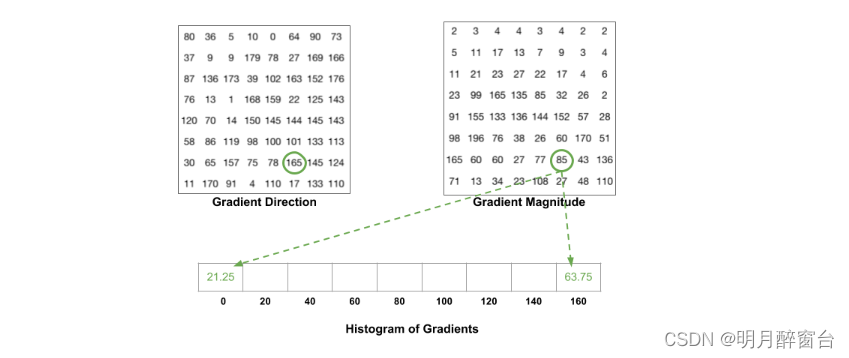
- 将 8×8 个单元格中所有像素的贡献相加以创建 9 箱直方图。对于上面的尺寸,它看起来像这样:
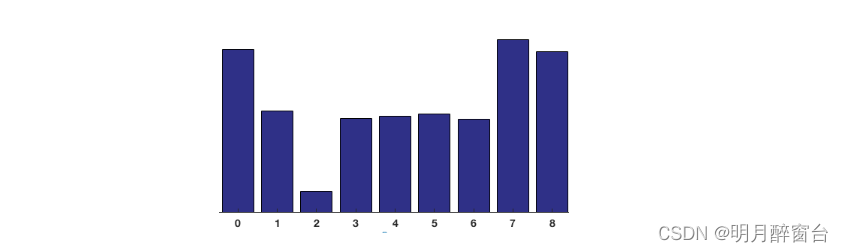
在我们的表示中,y 轴为 0 度。您可以看到直方图在 0 度和 180 度附近有很多权重,这只是另一种说法,在色块中梯度指向向上或向下。
2.4 16×16 块规范化
-
理想情况下,我们希望描述符独立于光照变化。换句话说,我们希望对直方图进行“归一化”,以便它们不受光照变化的影响。

-
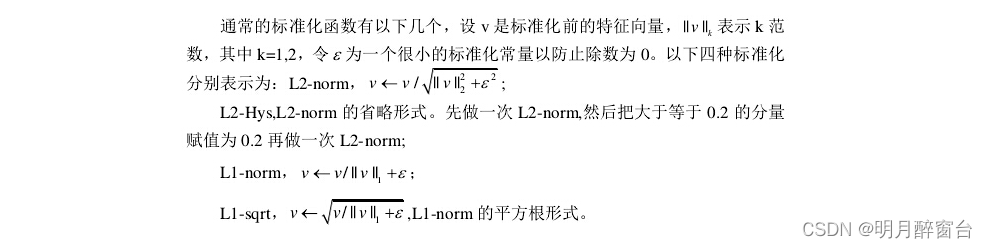
如上图所示,一个 16×16 块有 4 个直方图,可以连接起来形成一个 36 x 1 元素向量,并且可以像 3×1 向量归一化一样进行归一化。然后窗口移动8个像素(参见动画),并在此窗口上计算归一化的36×1向量并重复该过程。其中,归一化实现为:分别对每个block进行标准化,一个block内有4个cell,每个cell含9维特征向量,故每个block就由4x9=36维特征向量来表征。
2.5 HOG特征
-
HOG特征即计算定向梯度特征向量的直方图
-
为了计算整个图像块的最终特征向量,将 36×1 个向量连接成一个巨大的向量。这个向量的大小是多少?让我们计算一下:
- 16×16 个区块有多少个仓位?有 7 个水平位置和 15 个垂直位置,总共 7 x 15 = 105 个位置。
- 每个 16×16 块由 36×1 向量表示。因此,当我们将它们全部连接成一个增益向量时,我们得到一个 36×105 = 3780 维向量。
-
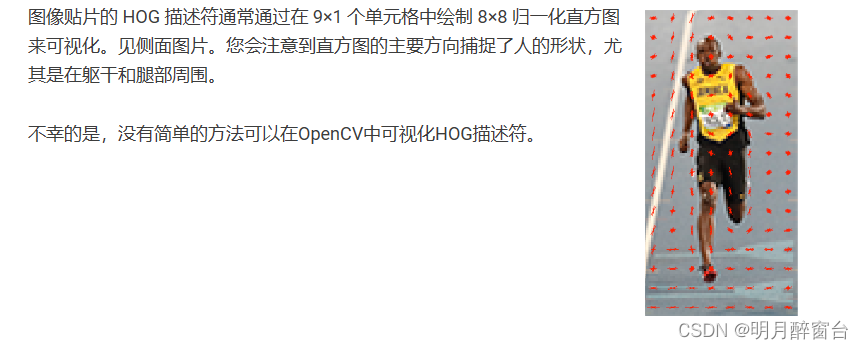
计算结果可视化如下:
3. Opencv中HOG特征使用
- Opencv官方API参考:https://docs.opencv.org/4.x/d5/d33/structcv_1_1HOGDescriptor.html
- 附一个Opencv官方使用教程
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/ml.hpp"
#include "opencv2/objdetect.hpp"
#include "opencv2/videoio.hpp"
#include <iostream>
#include <time.h>
using namespace cv;
using namespace cv::ml;
using namespace std;
vector< float > get_svm_detector( const Ptr< SVM >& svm );
void convert_to_ml( const std::vector< Mat > & train_samples, Mat& trainData );
void load_images( const String & dirname, vector< Mat > & img_lst, bool showImages );
void sample_neg( const vector< Mat > & full_neg_lst, vector< Mat > & neg_lst, const Size & size );
void computeHOGs( const Size wsize, const vector< Mat > & img_lst, vector< Mat > & gradient_lst, bool use_flip );
void test_trained_detector( String obj_det_filename, String test_dir, String videofilename );
vector< float > get_svm_detector( const Ptr< SVM >& svm )
{
// get the support vectors
Mat sv = svm->getSupportVectors();
const int sv_total = sv.rows;
// get the decision function
Mat alpha, svidx;
double rho = svm->getDecisionFunction( 0, alpha, svidx );
CV_Assert( alpha.total() == 1 && svidx.total() == 1 && sv_total == 1 );
CV_Assert( (alpha.type() == CV_64F && alpha.at<double>(0) == 1.) ||
(alpha.type() == CV_32F && alpha.at<float>(0) == 1.f) );
CV_Assert( sv.type() == CV_32F );
vector< float > hog_detector( sv.cols + 1 );
memcpy( &hog_detector[0], sv.ptr(), sv.cols*sizeof( hog_detector[0] ) );
hog_detector[sv.cols] = (float)-rho;
return hog_detector;
}
/*
* Convert training/testing set to be used by OpenCV Machine Learning algorithms.
* TrainData is a matrix of size (#samples x max(#cols,#rows) per samples), in 32FC1.
* Transposition of samples are made if needed.
*/
void convert_to_ml( const vector< Mat > & train_samples, Mat& trainData )
{
//--Convert data
const int rows = (int)train_samples.size();
const int cols = (int)std::max( train_samples[0].cols, train_samples[0].rows );
Mat tmp( 1, cols, CV_32FC1 ); //< used for transposition if needed
trainData = Mat( rows, cols, CV_32FC1 );
for( size_t i = 0 ; i < train_samples.size(); ++i )
{
CV_Assert( train_samples[i].cols == 1 || train_samples[i].rows == 1 );
if( train_samples[i].cols == 1 )
{
transpose( train_samples[i], tmp );
tmp.copyTo( trainData.row( (int)i ) );
}
else if( train_samples[i].rows == 1 )
{
train_samples[i].copyTo( trainData.row( (int)i ) );
}
}
}
void load_images( const String & dirname, vector< Mat > & img_lst, bool showImages = false )
{
vector< String > files;
glob( dirname, files );
for ( size_t i = 0; i < files.size(); ++i )
{
Mat img = imread( files[i] ); // load the image
if ( img.empty() )
{
cout << files[i] << " is invalid!" << endl; // invalid image, skip it.
continue;
}
if ( showImages )
{
imshow( "image", img );
waitKey( 1 );
}
img_lst.push_back( img );
}
}
void sample_neg( const vector< Mat > & full_neg_lst, vector< Mat > & neg_lst, const Size & size )
{
Rect box;
box.width = size.width;
box.height = size.height;
srand( (unsigned int)time( NULL ) );
for ( size_t i = 0; i < full_neg_lst.size(); i++ )
if ( full_neg_lst[i].cols > box.width && full_neg_lst[i].rows > box.height )
{
box.x = rand() % ( full_neg_lst[i].cols - box.width );
box.y = rand() % ( full_neg_lst[i].rows - box.height );
Mat roi = full_neg_lst[i]( box );
neg_lst.push_back( roi.clone() );
}
}
void computeHOGs( const Size wsize, const vector< Mat > & img_lst, vector< Mat > & gradient_lst, bool use_flip )
{
HOGDescriptor hog;
hog.winSize = wsize;
Mat gray;
vector< float > descriptors;
for( size_t i = 0 ; i < img_lst.size(); i++ )
{
if ( img_lst[i].cols >= wsize.width && img_lst[i].rows >= wsize.height )
{
Rect r = Rect(( img_lst[i].cols - wsize.width ) / 2,
( img_lst[i].rows - wsize.height ) / 2,
wsize.width,
wsize.height);
cvtColor( img_lst[i](r), gray, COLOR_BGR2GRAY );
hog.compute( gray, descriptors, Size( 8, 8 ), Size( 0, 0 ) );
gradient_lst.push_back( Mat( descriptors ).clone() );
if ( use_flip )
{
flip( gray, gray, 1 );
hog.compute( gray, descriptors, Size( 8, 8 ), Size( 0, 0 ) );
gradient_lst.push_back( Mat( descriptors ).clone() );
}
}
}
}
void test_trained_detector( String obj_det_filename, String test_dir, String videofilename )
{
cout << "Testing trained detector..." << endl;
HOGDescriptor hog;
hog.load( obj_det_filename );
vector< String > files;
glob( test_dir, files );
int delay = 0;
VideoCapture cap;
if ( videofilename != "" )
{
if ( videofilename.size() == 1 && isdigit( videofilename[0] ) )
cap.open( videofilename[0] - '0' );
else
cap.open( videofilename );
}
obj_det_filename = "testing " + obj_det_filename;
namedWindow( obj_det_filename, WINDOW_NORMAL );
for( size_t i=0;; i++ )
{
Mat img;
if ( cap.isOpened() )
{
cap >> img;
delay = 1;
}
else if( i < files.size() )
{
img = imread( files[i] );
}
if ( img.empty() )
{
return;
}
vector< Rect > detections;
vector< double > foundWeights;
hog.detectMultiScale( img, detections, foundWeights );
for ( size_t j = 0; j < detections.size(); j++ )
{
Scalar color = Scalar( 0, foundWeights[j] * foundWeights[j] * 200, 0 );
rectangle( img, detections[j], color, img.cols / 400 + 1 );
}
imshow( obj_det_filename, img );
if( waitKey( delay ) == 27 )
{
return;
}
}
}
int main( int argc, char** argv )
{
const char* keys =
{
"{help h| | show help message}"
"{pd | | path of directory contains positive images}"
"{nd | | path of directory contains negative images}"
"{td | | path of directory contains test images}"
"{tv | | test video file name}"
"{dw | | width of the detector}"
"{dh | | height of the detector}"
"{f |false| indicates if the program will generate and use mirrored samples or not}"
"{d |false| train twice}"
"{t |false| test a trained detector}"
"{v |false| visualize training steps}"
"{fn |my_detector.yml| file name of trained SVM}"
};
CommandLineParser parser( argc, argv, keys );
if ( parser.has( "help" ) )
{
parser.printMessage();
exit( 0 );
}
String pos_dir = parser.get< String >( "pd" );
String neg_dir = parser.get< String >( "nd" );
String test_dir = parser.get< String >( "td" );
String obj_det_filename = parser.get< String >( "fn" );
String videofilename = parser.get< String >( "tv" );
int detector_width = parser.get< int >( "dw" );
int detector_height = parser.get< int >( "dh" );
bool test_detector = parser.get< bool >( "t" );
bool train_twice = parser.get< bool >( "d" );
bool visualization = parser.get< bool >( "v" );
bool flip_samples = parser.get< bool >( "f" );
if ( test_detector )
{
test_trained_detector( obj_det_filename, test_dir, videofilename );
exit( 0 );
}
if( pos_dir.empty() || neg_dir.empty() )
{
parser.printMessage();
cout << "Wrong number of parameters.\n\n"
<< "Example command line:\n" << argv[0] << " -dw=64 -dh=128 -pd=/INRIAPerson/96X160H96/Train/pos -nd=/INRIAPerson/neg -td=/INRIAPerson/Test/pos -fn=HOGpedestrian64x128.xml -d\n"
<< "\nExample command line for testing trained detector:\n" << argv[0] << " -t -fn=HOGpedestrian64x128.xml -td=/INRIAPerson/Test/pos";
exit( 1 );
}
vector< Mat > pos_lst, full_neg_lst, neg_lst, gradient_lst;
vector< int > labels;
clog << "Positive images are being loaded..." ;
load_images( pos_dir, pos_lst, visualization );
if ( pos_lst.size() > 0 )
{
clog << "...[done] " << pos_lst.size() << " files." << endl;
}
else
{
clog << "no image in " << pos_dir <<endl;
return 1;
}
Size pos_image_size = pos_lst[0].size();
if ( detector_width && detector_height )
{
pos_image_size = Size( detector_width, detector_height );
}
else
{
for ( size_t i = 0; i < pos_lst.size(); ++i )
{
if( pos_lst[i].size() != pos_image_size )
{
cout << "All positive images should be same size!" << endl;
exit( 1 );
}
}
pos_image_size = pos_image_size / 8 * 8;
}
clog << "Negative images are being loaded...";
load_images( neg_dir, full_neg_lst, visualization );
clog << "...[done] " << full_neg_lst.size() << " files." << endl;
clog << "Negative images are being processed...";
sample_neg( full_neg_lst, neg_lst, pos_image_size );
clog << "...[done] " << neg_lst.size() << " files." << endl;
clog << "Histogram of Gradients are being calculated for positive images...";
computeHOGs( pos_image_size, pos_lst, gradient_lst, flip_samples );
size_t positive_count = gradient_lst.size();
labels.assign( positive_count, +1 );
clog << "...[done] ( positive images count : " << positive_count << " )" << endl;
clog << "Histogram of Gradients are being calculated for negative images...";
computeHOGs( pos_image_size, neg_lst, gradient_lst, flip_samples );
size_t negative_count = gradient_lst.size() - positive_count;
labels.insert( labels.end(), negative_count, -1 );
CV_Assert( positive_count < labels.size() );
clog << "...[done] ( negative images count : " << negative_count << " )" << endl;
Mat train_data;
convert_to_ml( gradient_lst, train_data );
clog << "Training SVM...";
Ptr< SVM > svm = SVM::create();
/* Default values to train SVM */
svm->setCoef0( 0.0 );
svm->setDegree( 3 );
svm->setTermCriteria( TermCriteria(TermCriteria::MAX_ITER + TermCriteria::EPS, 1000, 1e-3 ) );
svm->setGamma( 0 );
svm->setKernel( SVM::LINEAR );
svm->setNu( 0.5 );
svm->setP( 0.1 ); // for EPSILON_SVR, epsilon in loss function?
svm->setC( 0.01 ); // From paper, soft classifier
svm->setType( SVM::EPS_SVR ); // C_SVC; // EPSILON_SVR; // may be also NU_SVR; // do regression task
svm->train( train_data, ROW_SAMPLE, labels );
clog << "...[done]" << endl;
if ( train_twice )
{
clog << "Testing trained detector on negative images. This might take a few minutes...";
HOGDescriptor my_hog;
my_hog.winSize = pos_image_size;
// Set the trained svm to my_hog
my_hog.setSVMDetector( get_svm_detector( svm ) );
vector< Rect > detections;
vector< double > foundWeights;
for ( size_t i = 0; i < full_neg_lst.size(); i++ )
{
if ( full_neg_lst[i].cols >= pos_image_size.width && full_neg_lst[i].rows >= pos_image_size.height )
my_hog.detectMultiScale( full_neg_lst[i], detections, foundWeights );
else
detections.clear();
for ( size_t j = 0; j < detections.size(); j++ )
{
Mat detection = full_neg_lst[i]( detections[j] ).clone();
resize( detection, detection, pos_image_size, 0, 0, INTER_LINEAR_EXACT);
neg_lst.push_back( detection );
}
if ( visualization )
{
for ( size_t j = 0; j < detections.size(); j++ )
{
rectangle( full_neg_lst[i], detections[j], Scalar( 0, 255, 0 ), 2 );
}
imshow( "testing trained detector on negative images", full_neg_lst[i] );
waitKey( 5 );
}
}
clog << "...[done]" << endl;
gradient_lst.clear();
clog << "Histogram of Gradients are being calculated for positive images...";
computeHOGs( pos_image_size, pos_lst, gradient_lst, flip_samples );
positive_count = gradient_lst.size();
clog << "...[done] ( positive count : " << positive_count << " )" << endl;
clog << "Histogram of Gradients are being calculated for negative images...";
computeHOGs( pos_image_size, neg_lst, gradient_lst, flip_samples );
negative_count = gradient_lst.size() - positive_count;
clog << "...[done] ( negative count : " << negative_count << " )" << endl;
labels.clear();
labels.assign(positive_count, +1);
labels.insert(labels.end(), negative_count, -1);
clog << "Training SVM again...";
convert_to_ml( gradient_lst, train_data );
svm->train( train_data, ROW_SAMPLE, labels );
clog << "...[done]" << endl;
}
HOGDescriptor hog;
hog.winSize = pos_image_size;
hog.setSVMDetector( get_svm_detector( svm ) );
hog.save( obj_det_filename );
test_trained_detector( obj_det_filename, test_dir, videofilename );
return 0;
}
参考
1.HOG:从理论到OpenCV实践
2.【特征检测】HOG特征算法