视频中交通标志的跟踪检测
- Detection-by-tracking of traffic signs in videos
- 1 Introduction
- 3 Methods
- 3.1 Faster R-CNN
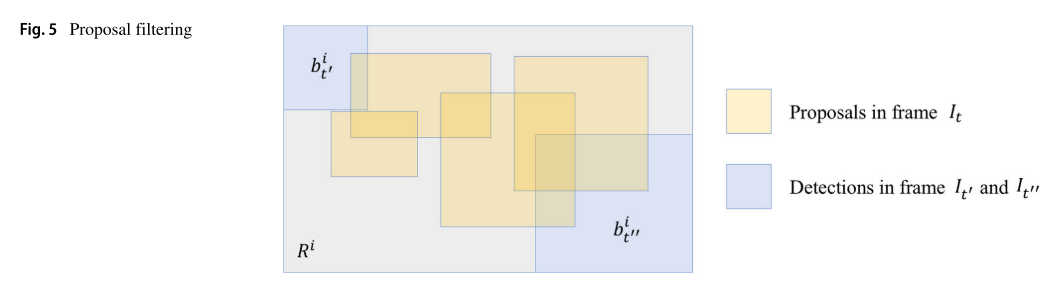
- 3.2 Proposed shortest-path approach
- 3.3 Tractor-based method
- 3.4 IoU-based method
- 6 Conclusions
Detection-by-tracking of traffic signs in videos
视频中交通标志的跟踪检测,用于视频中鲁棒的交通标志检测,以便改进超过基本对象检测器的检测性能。我们探索了帧之间的时间线索,以帮助进一步回归的建议推理。
1 Introduction
交通标志的代表性例子分为三大类:(a)禁止标志。(b)强制性标志。©危险信号。请注意,还有其他特殊标志不属于上述任何大类
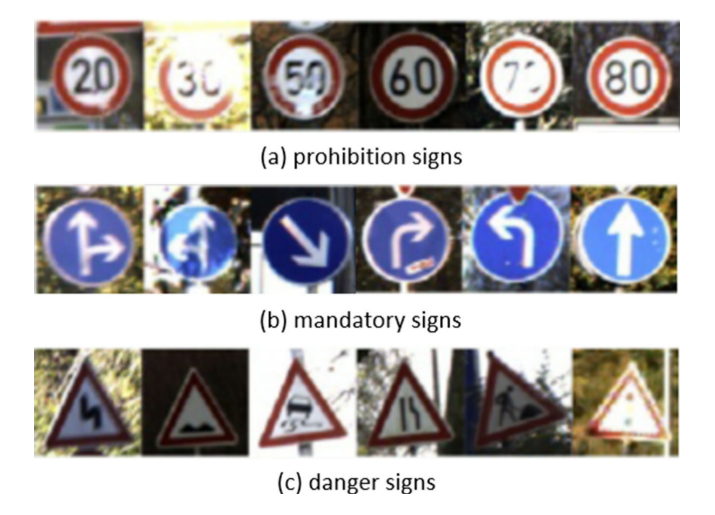
图2使用基于单幅图像的检测器(Faster R-CNN)在不同视频序列中检测交通标志的良好检测和失败情况。红框和绿色框分别表示错误分类和正确分类

在这篇论文中,我们尝试在基本的目标侦测器之外,改善交通标志侦测的效能。本文贡献如下:
- 我们提出了一种基于候选建议最短路径搜索的跟踪检测方法。该方法利用视频帧之间的相同交通标志的时间相关性信息。利用相邻帧的信息,极大地增强了对有希望方案的回归。
- 通过恢复丢失帧或校正错误帧,我们可以提高基于单幅图像模型的检测性能。由于不再需要大规模的标注视频序列,因此可以在一定程度上解决由有限的训练样本引起的检测性能差的瓶颈。
- 我们采用了几种算法,首先设计用于多目标跟踪(MOT)或VID,以检测视频中的交通标志。这些方法的实验结果为提高检测性能提供了参考。后处理、检测跟踪和端到端方法都包括在内。
3 Methods
3.1 Faster R-CNN

Faster R-CNN检测结果存在波动。每个几何图案代表一个框架。绿色圆圈表示良好的检测,而红色矩形和三角形表示具有错误类别的检测。灰色圆圈表示缺失检测
3.2 Proposed shortest-path approach
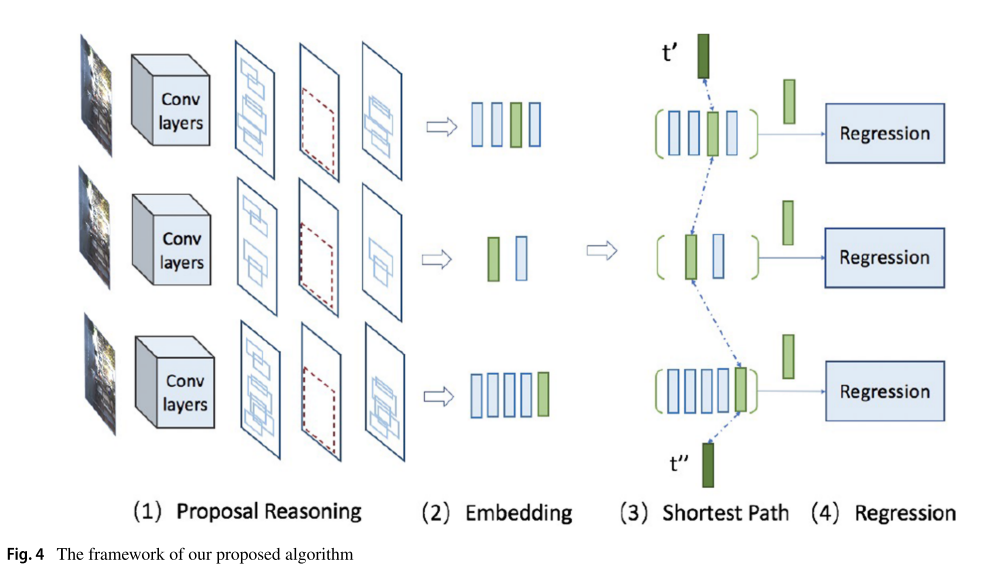
提出的最短路径方法作为后处理过程来提高检测器的性能。如图4所示,整个框架由几个步骤组成:
如图5所示,对于两帧之间可能缺失的检测,我们使用Ri来过滤从更快R-CNN提供的整个图像提议,并且将候选提议集合{Pt }保持在Ri内。
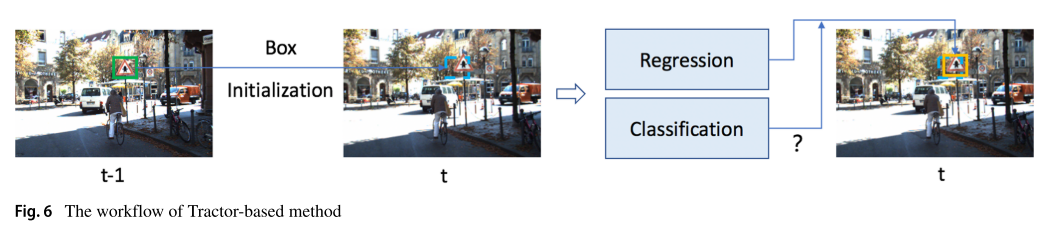
3.3 Tractor-based method
每个交通标志都可以作为视频序列中的轨迹找到,该轨迹被定义为沿着时间的2D边界框坐标。至于轨迹中的缺失部分(例如,图3中的灰色和红色图案),我们执行以下步骤(如图6所示):
3.4 IoU-based method
如图7所示,这个想法是使用附近帧中的高得分检测来提高较弱检测的得分。

6 Conclusions
随着先进的驾驶员辅助系统或自动驾驶应用的出现,从安装在汽车上的摄像机检测和识别道路标志的问题正获得越来越多的关注。在这篇论文中,我们尝试在单一影像物件侦测器的基础上改善侦测效能。
我们已研究了可纳入该制度的各种措施。我们研究并实现了Tractor-based、基于IOU的方法、DFF、FGFA和SELSA。我们也提出一个架构,作为一个后处理程序,基于Faster R-CNN的两阶段目标检测器。