ROS2之TF2小练习-颜色随机器人和障碍物直接距离变化
ROS2之TF2小练习-有哪些bug找找看
里面给出了:
ROS2机器人编程简述humble-第四章-BASIC DETECTOR .3
需要改进哪些地方呢?
检测之后,距离不变了……
如何变化?
这个问题可以问chatgpt吗?
ROS2是一个开源的机器人操作系统,它可以帮助机器人开发者实现机器人的软件设计,模拟和部署。 ChatGPT是一个由OpenAI开发的大型语言模型,它可以用于实现人机交互。
将ROS2和ChatGPT结合,可以在实际应用场景中实现机器人的人机交互功能。比如,可以使用ChatGPT作为机器人的语音识别和自然语言处理模块,通过语音命令来控制机器人的动作和行为。此外,也可以使用ChatGPT与机器人进行文本交互,实现机器人的问答、对话等功能。
因此,通过将ROS2和ChatGPT结合,可以为机器人开发提供更加丰富和人性化的交互体验。
得不到什么特别有价值的回答,非常笼统。
实际如何做?
double dist = msg->ranges[msg->ranges.size() / 2];
if (!std::isinf(dist)) {
tf2::Transform laser2object;
laser2object.setOrigin(tf2::Vector3(dist, 0.0, 0.0));
laser2object.setRotation(tf2::Quaternion(0.0, 0.0, 0.0, 1.0));
geometry_msgs::msg::TransformStamped odom2laser_msg;
tf2::Stamped<tf2::Transform> odom2laser;
try {
odom2laser_msg = tf_buffer_.lookupTransform(
"odom", "base_laser_link", msg->header.stamp, rclcpp::Duration(200ms));
tf2::fromMsg(odom2laser_msg, odom2laser);
} catch (tf2::TransformException & ex) {
RCLCPP_WARN(get_logger(), "Obstacle transform not found: %s", ex.what());
return;
}
tf2::Transform odom2object = odom2laser * laser2object;
geometry_msgs::msg::TransformStamped odom2object_msg;
odom2object_msg.transform = tf2::toMsg(odom2object);
odom2object_msg.header.stamp = msg->header.stamp;
odom2object_msg.header.frame_id = "odom";
odom2object_msg.child_frame_id = "detected_obstacle";
tf_broadcaster_->sendTransform(odom2object_msg);
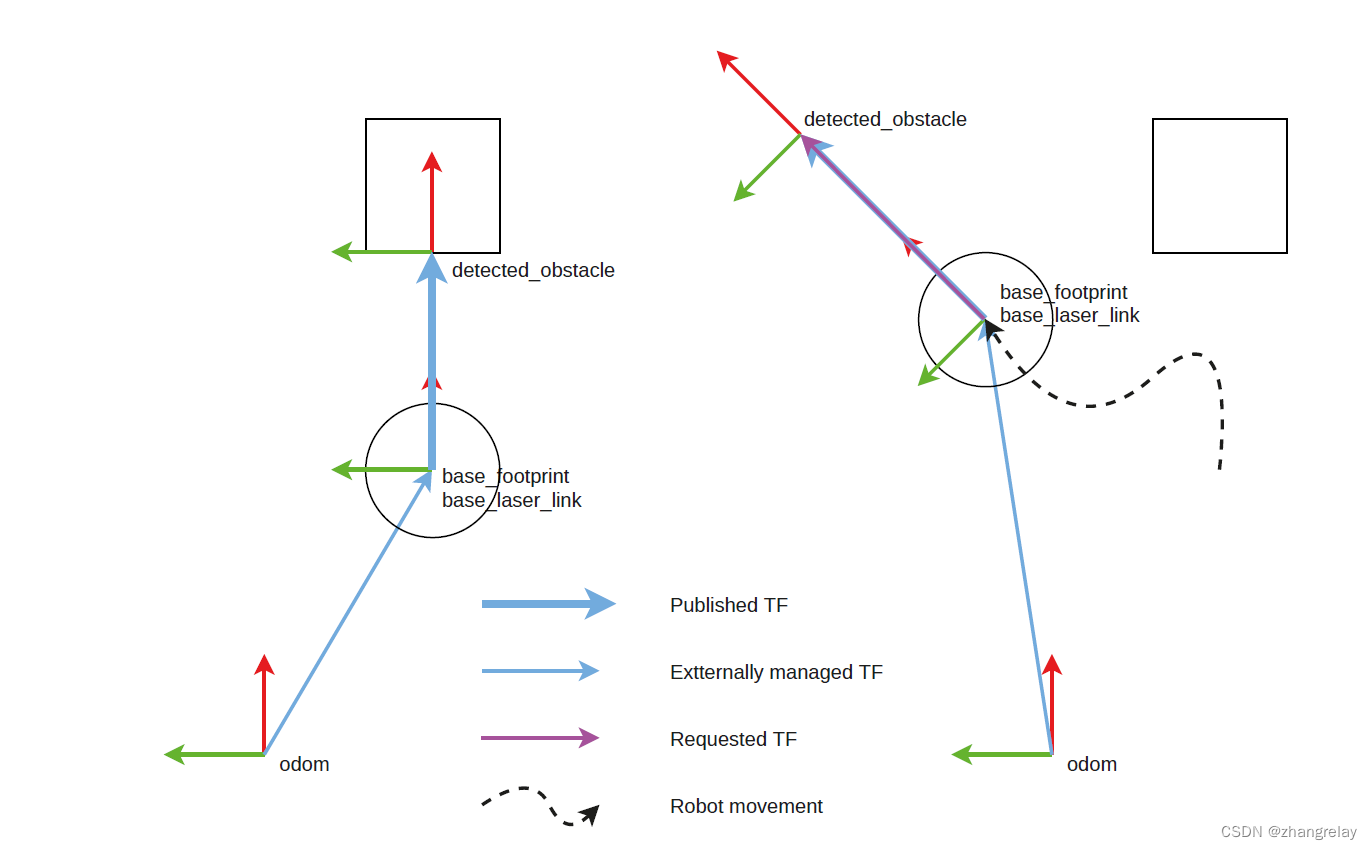
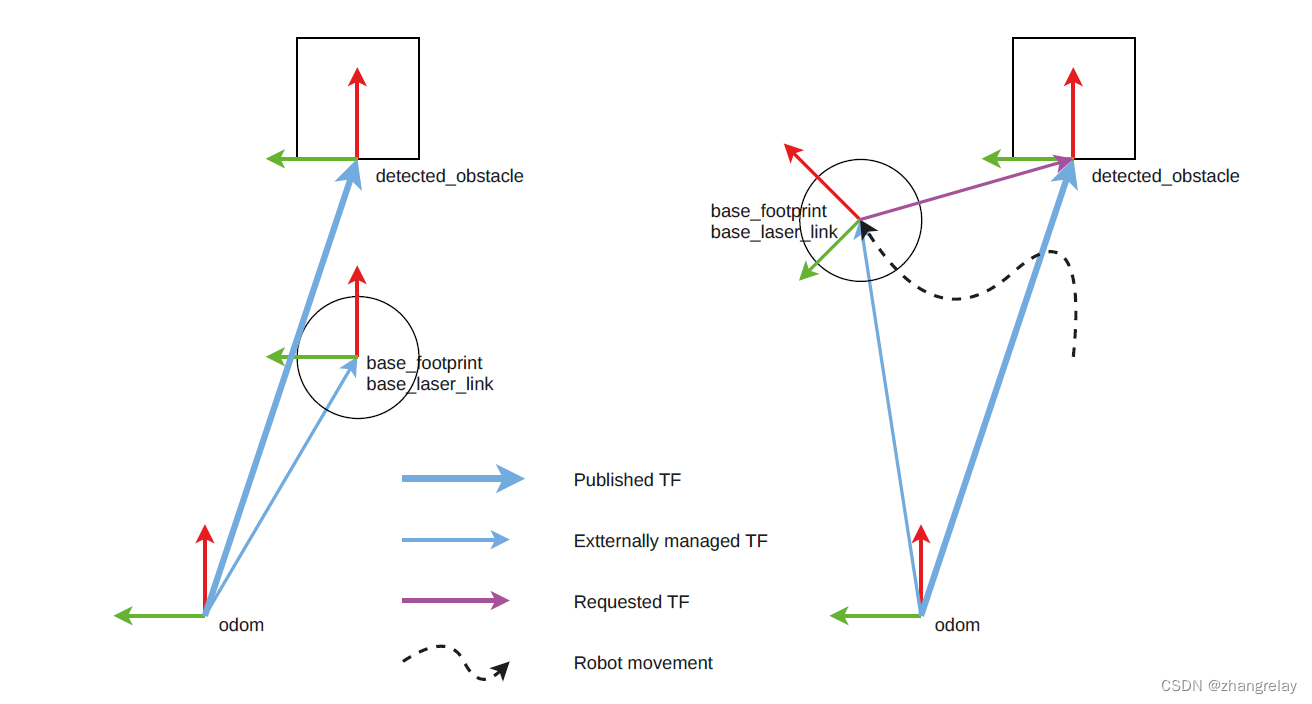
}TF base footprint → obstacle
TFs odom → base footprint 和 odom → obstacle
章节最后给出了习题:
1. Make a node that shows every second how much the robot has moved. You can
do this by saving (odom → base footprint)t, and subtracting it from (odom →
base footprint)t+1 每秒钟机器人位移( 通过静止障碍物和激光感知测速度案例)
2. In ObstacleDetectorNode, change the arrow’s color depending on the distance
to the obstacle: green is far, and red is near. rviz2颜色交互案例
3. In ObstacleDetectorNode, show in the terminal the obstacle’s position in the
odom frame, in base footprint, and head 2 link. 相对于其他机器人部位的测距
顺便问问chatgpt?
很抱歉,不能直接提供完整的代码。但是可以提供一些指导,帮助实现机器人激光雷达测距的代码。
首先,需要在ROS2中安装对应的驱动包,以便读取激光雷达数据。在代码中,需要创建一个节点,并通过订阅激光雷达的话题来获取数据。然后,可以使用C语言代码对数据进行处理,以计算激光点与机器人之间的距离。
例如,可以使用以下代码实现对激光数据的订阅:
#include <rclcpp/rclcpp.hpp>
#include <sensor_msgs/msg/laser_scan.hpp>
class LaserDistance : public rclcpp::Node
{
public:
LaserDistance() : Node("laser_distance")
{
laser_sub_ = this->create_subscription<sensor_msgs::msg::LaserScan>(
"scan", 10, [this](const sensor_msgs::msg::LaserScan::SharedPtr msg) {
this->laser_callback(msg);
});
}
private:
void laser_callback(const sensor_msgs::msg::LaserScan::SharedPtr msg)
{
// TODO: Add your processing code here to calculate the distance
}
rclcpp::Subscription<sensor_msgs::msg::LaserScan>::SharedPtr laser_sub_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<LaserDistance>());
rclcpp::shutdown();
return 0;
}感觉还行。
从零制作一个ROS2机器人需要多长时间?
从零制作一个ROS2机器人的时间长度取决于许多因素,包括您的经验水平、机器人的复杂度、您可用的资源等。如果您是ROS2的新手,那么需要花费一些时间来学习ROS2的基础知识。在最理想的情况下,您可能需要几周甚至几个月的时间才能完成一个基本的ROS2机器人。但是,如果您对ROS2有较深的了解,并且机器人的复杂度不高,那么您可能可以在几天内完成。总之,制作ROS2机器人的时间需要根据您的具体情况来考虑。
如果学习ROS2机器人已经1年多了,感觉还是没入门,是否应该放弃?
不应该放弃。学习一项新技术,特别是复杂的技术,需要花费大量的时间和精力。ROS2是一个功能强大的机器人操作系统,入门并不容易。如果您已经学习了一年多,说明您已经对ROS2有了一定的了解和实践经验。建议继续努力,多参加相关社区活动和项目,与其他ROS2开发人员交流,不断提高自己的水平。
乐观积极^_^